отчет. Курсовой проект по деталям машин, и посвящены первому этапу проектирования предварительному расчету привода. Печатается по решению редакционноиздательского совета Омского государственного технического университета
 Скачать 2.84 Mb. Скачать 2.84 Mb.
|

|
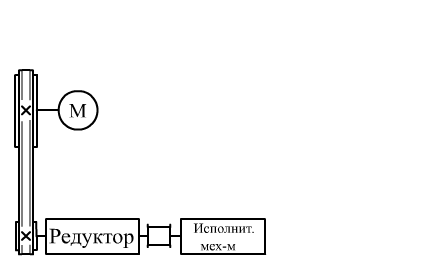
Федеральное агенство по образованию Государственное образовательное учреждение высшего профессионалногообразования « Омский государственный технический университет » ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ПРИВОДА Методические указания к курсовому проекту по деталям машин ОМСК 2005 Составитель Мехаев Михаил Борисович, канд. техн. наук, доц. Методика предварительного расчета излагается в том порядке, в котором необходимо производить расчет, и иллюстрируется примером. Кроме того, методические указания содержат необходимый для данного этапа проектирования справочный материал, а также схемы и варианты заданий на курсовой проект. Методические указания предназначены для студентов механических специальностей, выполняющих курсовой проект по деталям машин, и посвящены первому этапу проектирования Печатается по решению редакционно-издательского совета Омского государственного технического университета . Редактор Н.Н. Пацула ИД № 06039 от 12.10.2001 г. Свод.темплан 2005 г. Подписано к печати 31.05.05. Бумага офсетная. Формат 60 Издательство ОмГТУ. 644050, г. Омск, пр-т Мира,11 Типография ОмГТУ Основной целью данной работы является оказание помощи студентам в их самостоятельной работе над проектом. Заданием на курсовой проект по деталям машин является конструирование привода цепного или ленточного конвейера, который, как и любая другая машина, включает в себя три основных узла:  1 2 3 1 2 3В данном проекте разработке подлежат второй или третий узлы машины. В качестве двигателя у большинства конвейеров используется стандартный электромотор трехфазного тока. Передаточный механизм в зависимости от задания на курсовой проект может содержать открытую передачу и редуктор или один редуктор. Исполнительным механизмом (ИМ) в данном проекте является приводной вал конвейера. Для ленточного конвейера Согласно полученному заданию студент должен спроектировать привод конвейера, т. е. произвести расчеты и разработать чертежи в объеме, установленном заданием на курсовой проект. Все необходимые расчеты и пояснения особенностей конструкции и эксплуатации привода оформляются в виде пояснительной записки. 3 ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ПРИВОДА Цель предварительного расчета заключается в составлении и уточнении кинематической схемы установки, выборе основных элементов привода и проведении его кинематического и силового анализа. Этот этап заканчивается составлением таблицы исходных данных, необходимой для дальнейшего расчета отдельных узлов и деталей привода. 1. Составление кинематической схемы Каждый студент получает от руководителя шифр задания на курсовой проект, построенный по следующей схеме:  15 КП 2069889  Курсовой проект, шифр ОмГТУ Шифр кафедрыНомер варианта схемы привода (рис.1) Номер варианта схемы редуктора (рис.2) Номер варианта схемы ИМ и графика нагрузки (рис.3) Номер варианта исходных данных (табл.2 или 3) Например: задан шифр: КП. 2069889. 15. Д 1. 3 4 15     Принципиальная схема привода № 1 (рис.1) Редуктор двухступенчатый цилиндрический, выполненный по развернутой схеме (рис.2, вар. №3) Исходные данные по варианту №15 из табл. 2 (табл. 3 для цепных конвейеров) Конвейер ленточный, ИМ- вал приводного барабана (рис.3, вар. .№4) 4
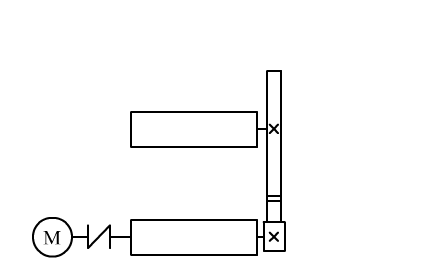
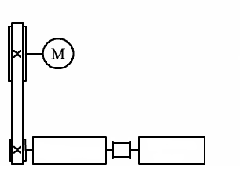
Рис.1 Варианты принципиальных схем привода. 5 Таблица 1 Условные обозначения элементов кинематических схем 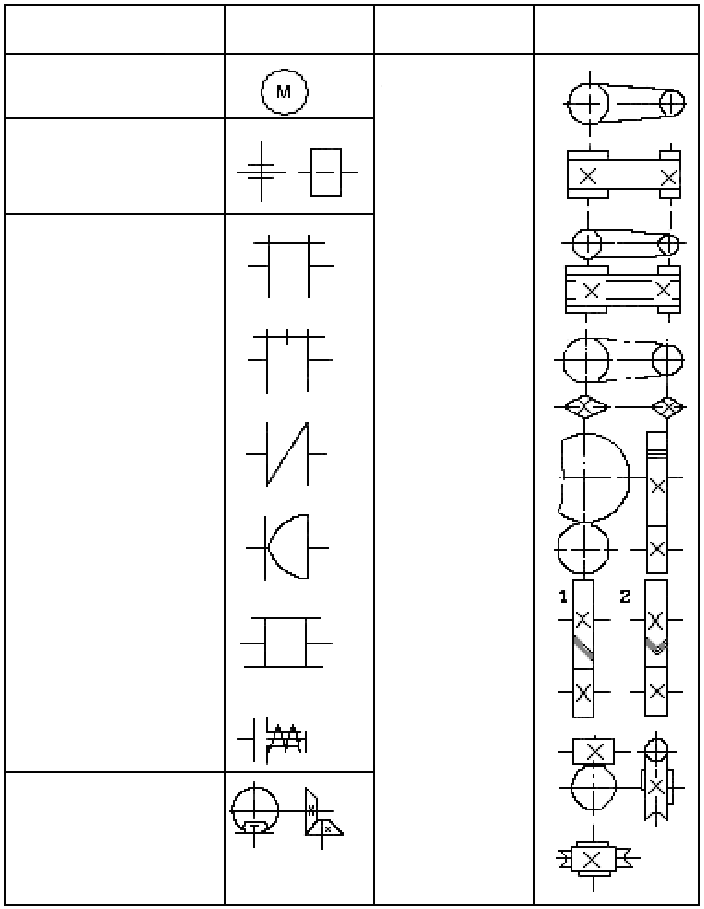 Элемент Обозначение Элемент Обозначение Двигатель электрический Соединение детали и вала, свободное при вращении Соединение валов: глухое глухое с предохранением от перегрузки эластичное шарнирное зубчатой муфтой предохранительной муфтой Передачи: зубчатые конические (общее обозначение) Передачи: плоским ремнем клиновым ремнем приводной цепью зубчатые с прямыми зубьями то же: 1. с косыми зубьями; 2. шевронные червячные с цилиндричес- ким червяком 6
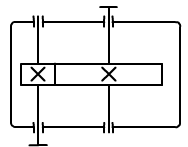
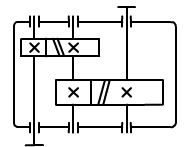
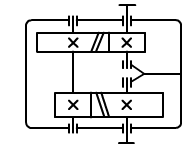
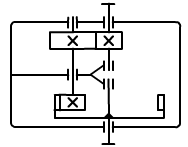
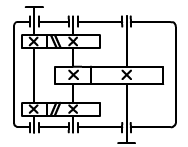
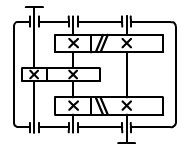
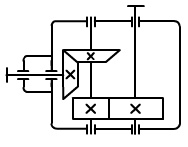
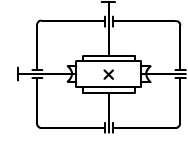
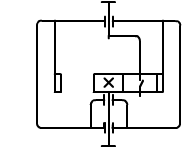
Рис. 2. Варианты кинематических схем редукторов (начало) 7 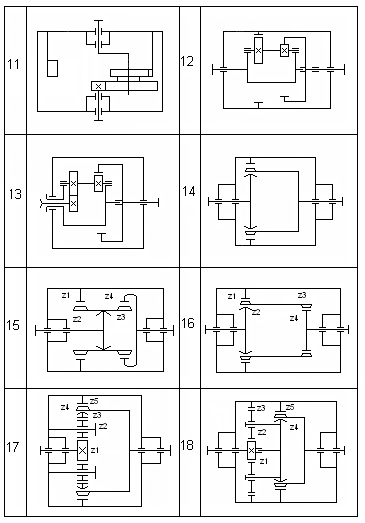 Рис. 2. Варианты кинематических схем редукторов (окончание) 8
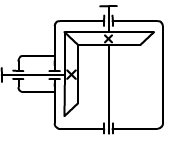
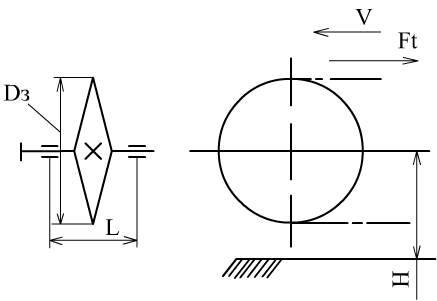
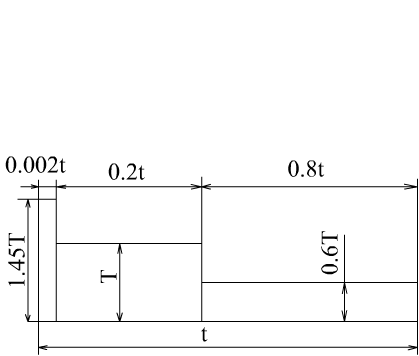
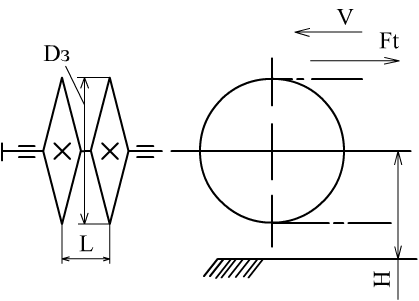
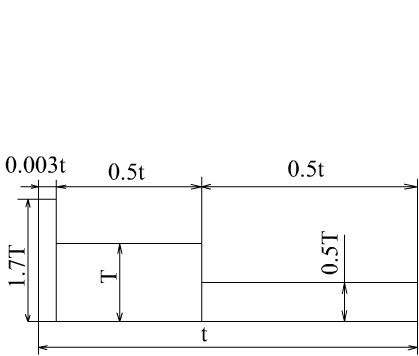
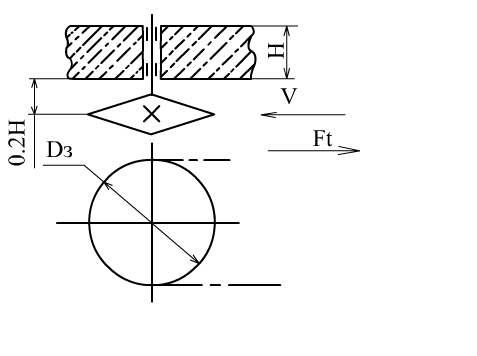
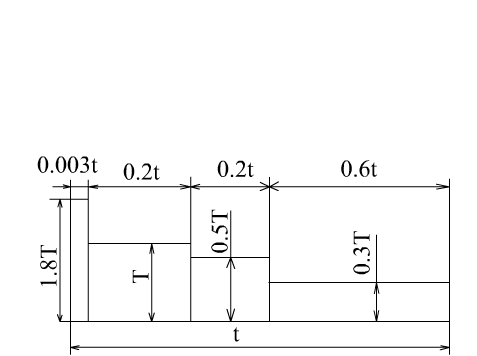
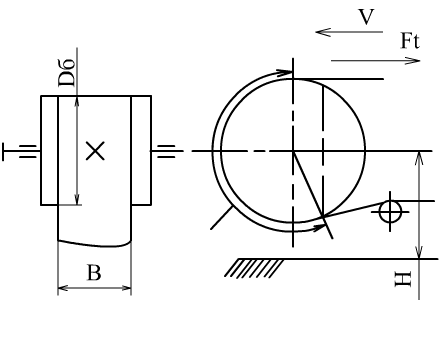
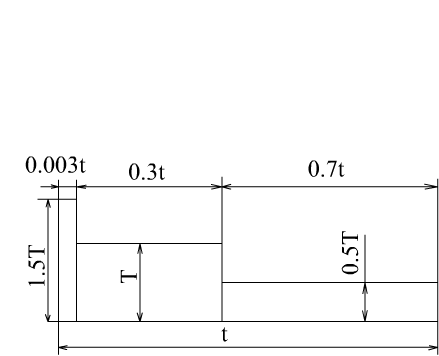
Рис. 3. Варианты исполнительных механизмов конвейера и графики нагрузки 9 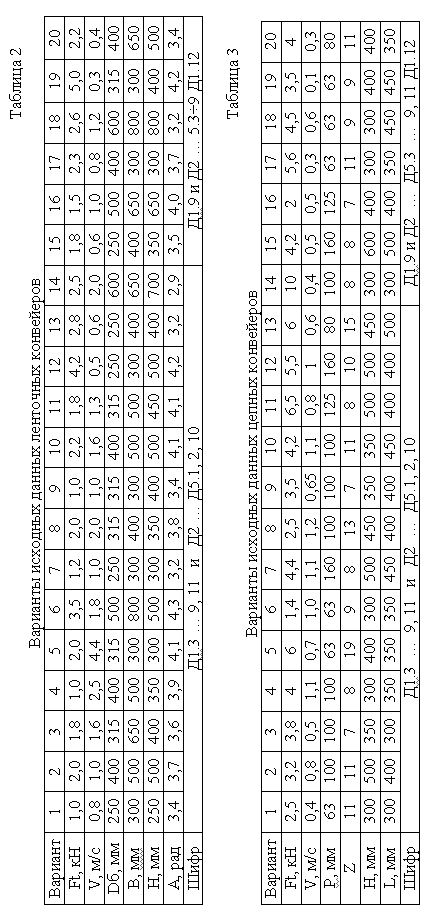 10 10 Задание на курсовой проект по деталям машин Шифр КП.15.Д2.21.06 Студенту Ивановой И.Г. факультет ВМТ гр. ВМТ-411 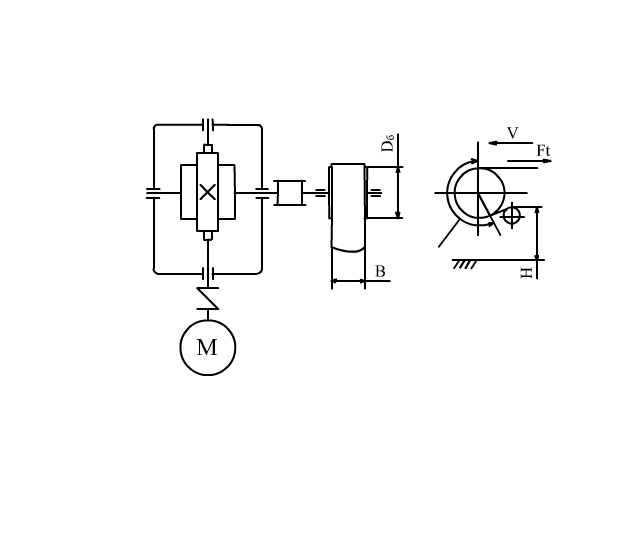 Спроектировать привод ленточного конвейера Кинематическая схема График нагрузки 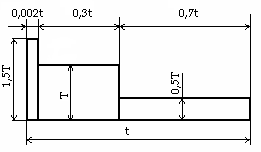                                    Исходные данные 1. Окружное усилие на барабане – Ft , кН 1,8 2. Скорость ленты конвейера – V , м/с 0,6 3. Диаметр барабана – Dб , мм 250 4. Ширина ленты – В , мм 400 5. Высота установки ведущего вала – H , мм 350 6. Угол обхвата барабана – α , рад 3,5 Разработать 1. Сборочный чертеж ведущего вала (срок исполнения 15.03.99) 2. Сборочный чертеж редуктора (срок исполнения 20.04.99) 3. Сборочный чертеж привода (срок исполнения 03.05.99) 4. Рабочие чертежи деталей (срок исполнения 10.05.99) Проект предоставить к защите 13.05.99 Задание получил 12.02.99 разработчикИ.Г. Иванова (подпись) Руководитель разработки И.Н. Попов ст. преподаватель (подпись) 11 Задание на курсовой проект по деталям машин Шифр КП.15.Д2.21.06 Студенту Иванову В.П. факультет ВТ гр. ВТ-411 Спроектировать привод цепного конвейера 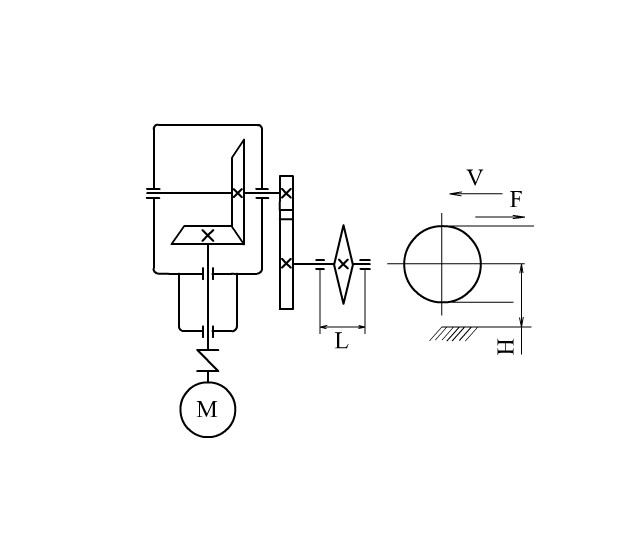 Кинематическая схема График нагрузки 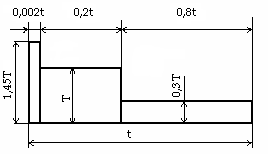 Исходные данные 1. Окружное усилие на звездочке – Ft , кН 1,4 2. Скорость цепи конвейера – V , м/с 1,0 3. Шаг цепи по ГОСТ 588-81 – P , мм 63 4. Число зубьев ведущей звездочки – Z 9 5. Высота установки ведущего вала – H , мм 300 6. Установочный размер ИМ – L , мм 350 Разработать 1. Сборочный чертеж редуктора (срок исполнения 30.03.99) 2. Сборочный чертеж ведущего вала (срок исполнения 20.04.99) 3. Сборочный чертеж привода (срок исполнения 03.05.99) 4. Рабочие чертежи деталей (срок исполнения 10.05.99) Проект предоставить к защите 15.05.99 Задание получил 12.02.99 разработчикВ.П.Иванов (подпись) Руководитель разработки И.Н.Попов ст. преподаватель (подпись) 12 Например: КП.15.Д1.34. КП.15.Д3.12. 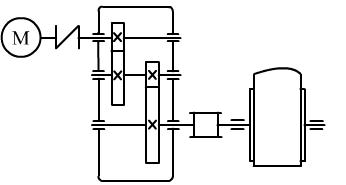 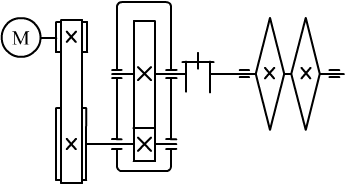 Составляя кинематические схемы, нужно помнить, что при передаче тягового усилия Ft зацеплением с помощью тяговых цепей (цепные конвейеры) в приводе необходимо предусмотреть предохранительное устройство в виде предохранительной муфты предельного момента. Например, соединение приводной звездочки со ступицей можно выполнить через срезной штифт. Кинематическая схема и график нагрузки после согласования с руководителем проектирования вычерчивается на бланке задания. Здесь же приводятся исходные данные, которые в соответствии с заданным вариантом выписываются из табл. 2 или табл. 3. В этих таблицах в графе "шифр" указаны рекомендуемые для каждого варианта сочетания номеров общей схемы привода и схем редукторов (на бланк задания не заносится). Выше показаны примеры оформления бланков заданий. Кинематическая схема привода в произвольном масштабе вычерчивается также на чертеже общего вида. 2. Определение недостающих геометрических размеров исполнительного механизма На этапе предварительного расчета определяются недостающие размеры (не указанные в исходных данных), необходимые для выполнения чертежа вала ИМ. Если в качестве ИМ задан вал приводного барабана ленточного конвейера, то дополнительно определяется длина барабана в миллиметрах: Вб = В + (50... 100), (1) где В – ширина ленты транспортера, мм (задана в исходных данных). Если ИМ – вал цепного конвейера, то на данном этапе ограничиваются расчётом диаметра делительной окружности приводной звёздочки: где DЗ – диаметр делительной окружности, мм; Р – шаг тяговой цепи, мм; Z – число зубьев звёздочки. 3. Определение потребной мощности и выбор электродвигателя Расчётная мощность электродвигателя в киловаттах определяется по зависимости 13 где ТЕ – постоянный вращающий момент на валу ИМ, эквивалентный переменому моменту, заданному графиком нагрузки, кНм; ω – угловая скорость вращения вала ИМ конвейера, рад/с; Эквивалентный вращающий момент рассчитывается следующим образом:  (4) (4) где Тi, ti – ступени нагрузки (момента) и соответствующее ей время работы по графику нагрузки; t – общее время работы под нагрузкой; Т – номинальный вращающий момент на ИМ, кНм. Номинальный момент находится по формуле (5) где Ft – окружное усилие на рабочем элементе Им, кН; D – диаметр барабана (DБ ) или звёздочки (DЗ ), мм. Угловая скорость вращения вала ИМ определяется по формуле (6) где V - скорость тягового элемента конвейера, м/с. Общий КПД привода находится как произведение КПД отдельных звеньев кинематической цепи: Значения КПД отдельных звеньев кинематической цепи можно принимать по табл. 4. КПД планетарных и волновых редукторов принимаются по рекомендациям специальной литературы [1 и др.]. 14 Таблица 4. Коэффициент полезного действия (КПД) отдельных звеньев кинематической цепи
Зависимость (3) является не единственной для определения расчетной мощности двигателя. Так, для расчета РР можно использовать формулу где FtE - эквивалентное окружное усилие, кН. Оно определяется по зависимости, аналогичной (4) , в которой Т заменяется на Ft , а К 15 Для однозначного выбора электродвигателя одной расчетной мощности недостаточно. Необходимо также знать расчетную частоту вращения вала электродвигателя или возможный диапазон ее изменения: г (9) где ω – угловая скорость вала ИМ, рассчитывается по формуле (6). О (10) г где Ртаб nтаб – табличные значения соответственно мощности, кВт и частоты вращения вала, об/мин. Если выбирается стандартный редуктор, то минимальное и максимальное передаточные отношения редуктора выбираются по соответствующим таблицам приложения. 16 Таблица 5 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 передача
передача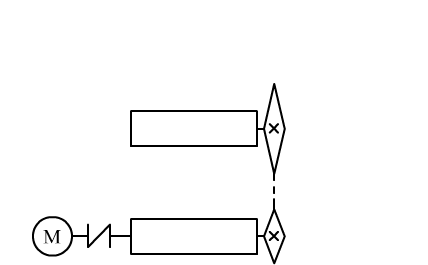

 емнем
емнем