Основы построения инфокоммуникационных систем и сетей. Курсовой проект по дисциплине Основы построения инфокоммуникационных систем и сетей Расчет основных параметров системы пдс
 Скачать 0.86 Mb. Скачать 0.86 Mb.
|

 . .Если на выходе канала, все значащие моменты (ЗМ) задержаны относительно исходных на одинаковое время (определяемое конечностью времени распространения сигнала в канале), то считают, что ЗМ совпадают с идеальными, а значащие интервалы с идеальными значащими интервалами сигналов, передаваемых на вход. 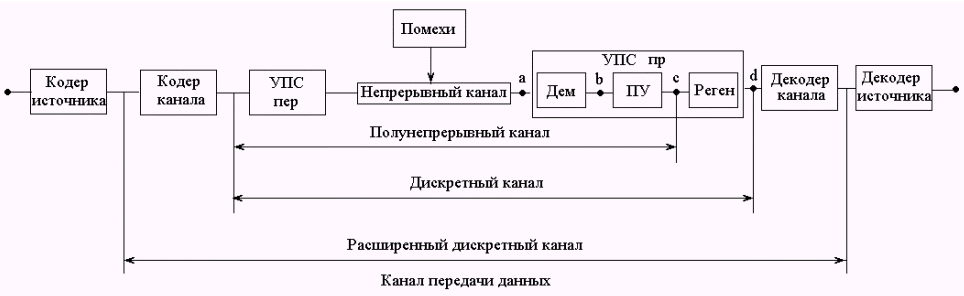 Рисунок 2.1 – Расширенный дискретный канал Рисунок 2.1 – Расширенный дискретный каналПод действием различных дестабилизирующих факторов элементы сигнала могут искажаться по длительности, т. е. появляются краевые искажения и дробления. Краевые искажения, возникающие под действием помех носят случайный характер и описываются соответствующим законам распределения (например, Гаусовским). Дробления – это искажения, при которых один элемент длительностью преобразуется в несколько более коротких (дробится). Сигнал, поступающий с выхода КПТ (рис. 2.1), должен быть отождествлен с “1” или “0”. Наиболее распространены для регистрации методы стробирования и интегрирования. Регистрация - процесс определения и запоминания значащей позиции сигнала данных. Эта операция противоположна операции дискретной модуляции и является первой в процедуре преобразования принятого сигнала в сообщение. 2.2 Методы регистрации Метод стробирования. При регистрации методом стробирования вид принимаемого элемента («0» или «1») определяется на основании анализа знака импульса постоянного тока (сигнала на выходе КПТ) в середине единичного интервала. Любое смещение момента регистрации относительно середины единичного интервала приводит к увеличению вероятности неправильной регистрации сигнала. Структурная схема устройства, осуществляющего регистрацию посылок методом стробирования, приведена на рис. 2.2, а временные диаграммы, поясняющие его принцип работы — на рис. 2.3. Передается последовательность 10101. На выходе входного устройства Вх.У импульсы постоянного тока имеют прямоугольную форму, но искажены по длительности. Ключи Кл1 и Кл2 открываются одновременно на время поступления строб импульса. Поступление импульсов стробирования в моменты, соответствующие серединам единичных интервалов, обеспечивается применением устройств поэлементной синхронизации. При этом сигнал появляется или на выходе Кл1 или Кл2. В зависимости от этого выходное устройство Вых.У фиксирует «1» или «0». Если смещение ЗМ относительно идеального положения не превышает 0,5τо, то элемент сигнала регистрируется правильно. Величина, на которую допускается смещение ЗМ, не вызывающее неправильный прием, определяет исправляющую способность приёмника (или телеграфного аппарата). В нашем случае исправляющая способность (теоретическая) равна 0,5τо или 50%. Из рис. 2.3 видно, что из-за смещения ЗМ относительно идеального положения на величину, превышающую 0,5τо, пятый элемент принимается неправильно. 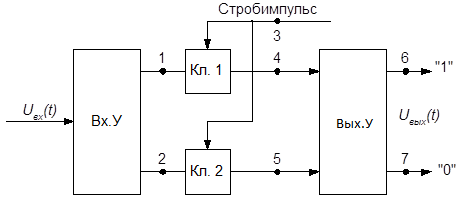 Рисунок – 2.2 - Регистрация методом стробирования 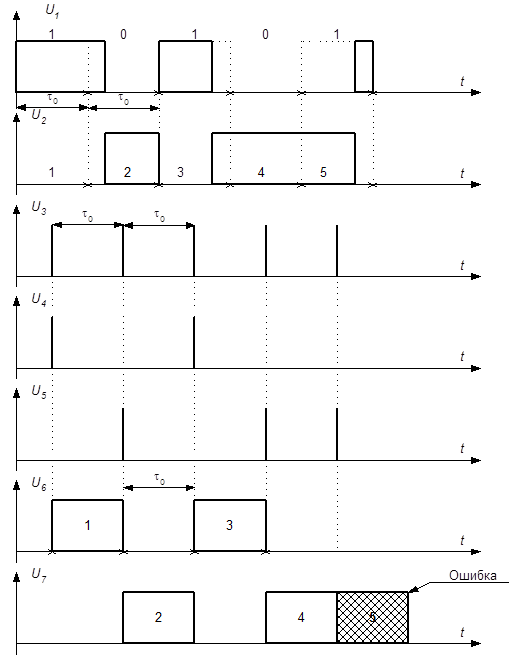 Рисунок 2.3 - Диаграммы, поясняющие принцип работы методом стробирования Метод интегрирования. При интегральном методе регистрации решение о виде принятого элемента выносится на основе анализа сигнала  , определяемого выражением: , определяемого выражением: где Uвх(t) - сигнал на входе регистрирующего устройства (выходе КПТ). Этот сигнал является дискретной функции непрерывного времени. Интегрирование осуществляется на интервале, соответствующем неискаженному элементу. Пусть Uвх(t) принимается на интервале анализа как значения Uвх(t)=0, так и Uвх(t)=1. Тогда решения о приеме «1» должно выноситься, если Uвых1/2. Очевидно, что ошибка при передаче «1» будет в том случае, когда Uвых<1/2. Интегральный метод часто реализуется на основе многократного стробирования сигнала Uвх(t) в N точках. Схема, поясняющая принцип действия такого устройства регистрации приведена на рис. 2.4. 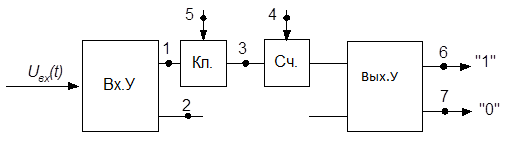 Рисунок 2.4 - Регистрация интегральным методом Сигнал U1(t) (точка 1) управляет ключом Кл. При открытом ключе, когда Uвх(t)=1, тактовые импульсы U5(t) (стробимпульсы) проходят на вход счетчика Сч. За время действия неискаженной токовой посылки U1(t) (на интервале 0) на выходе Кл. (точка 3) появляется N тактовых импульсов. Если на выходе Кл. на единичном интервале появится 0,5N+1 и более стробимпульсов, то можно сделать вывод о том, что принята «1». Емкость счетчика достаточно взять равной 0,5N+1. В конце единичного интервала, определяемого с помощью устройства поэлементной синхронизации, показания счетчика считываются, и он обнуляется. Временные диаграммы, иллюстрирующие работу схемы, приведены на рис. 2.5. Здесь неправильно регистрируется вторая посылка.  Рисунок 2.5 - Диаграммы, поясняющие принцип регистрации интегральным методом Сравним помехоустойчивость методов стробирования и интегрального при действии краевых искажений. Поскольку при регистрации методом стробирования посылка регистрируется в середине, то допускается смещение любого из ЗМ на величину, не превышающую 0,50. При регистрации интегральным методом суммарное смещение границ не должно превышать 0,50. Очевидно, что последнее условие выполняется с меньшей вероятностью, т. е.  где где  - соответственно вероятности неправильного приема при краевых искажениях и регистрации интегральным методом и методом стробирования. - соответственно вероятности неправильного приема при краевых искажениях и регистрации интегральным методом и методом стробирования.Решение задачи Начертить временные диаграммы сигналов на выходе каждого из элементов регистрирующего устройства, если используется интегральный метод, а так же заданы значащие моменты сигнала на входе регистрирующего устройства (в таблице – первый ЗМ означает переход от «0» к «1», общая длительность сигнала составляет 10 ). Стробирующий импульс предполагается бесконечно узким, длительностью которого можно пренебречь. Длительность единичного элемента выбрать самостоятельно.Дано:
Решение: 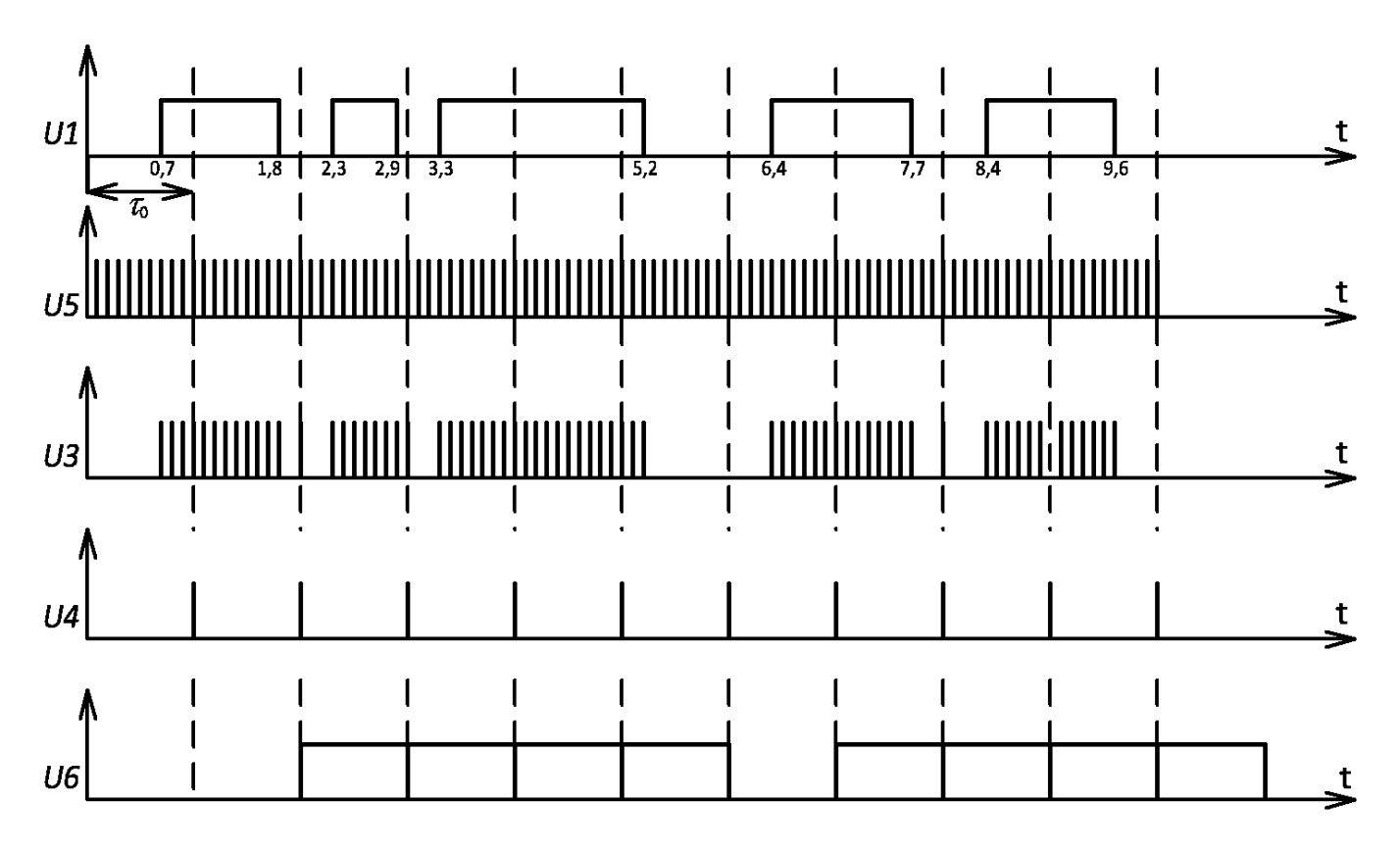 Рисунок 2.6 – Временные диаграммы сигналов на выходе каждого из элементов регистрирующего устройства Синхронизация в системах ПДС Для обеспечения правильного приема переданных сигналов в технике передачи дискретных сообщений приходится решать различные задачи синхронизации. Синхронизация есть процесс установления и поддержания определенных временных соотношений между двумя или несколькими процессами. В технике связи, в частности, часто приходится решать задачу установления и поддержания определенных фазовых соотношений между сигналами, вырабатываемыми на передаче и приеме. Различают поэлементную, групповую и цикловую синхронизацию. Поэлементная, групповая и цикловая синхронизации - это синхронизация переданного и принятого цифровых сигналов данных, при которой устанавливаются и поддерживаются требуемые фазовые соотношения между значащими моментами переданных и принятых соответственно единичных элементов сигналов, групп единичных элементов этих сигналов и циклов их временного объединения. Поэлементная синхронизация позволяет на приеме правильно отделить один единичный элемент от другого и обеспечить наилучшие условия для его правильного воспроизведения. Групповая синхронизация обеспечивает правильное разделение принятой последовательности на кодовые комбинации, а цикловая синхронизация - правильное разделение циклов временного объединения элементов на приеме. Обычно задачи цикловой и групповой синхронизации решаются одними и теми же методами. Классификация систем поэлементной синхронизации. Поэлементная синхронизация может быть обеспечена за счет использования автономного источника - хранителя эталона времени и методов принудительной синхронизации. Первый способ применяется лишь в тех случаях, когда время сеанса связи, включая время вхождения в связь, не превышает время сохранения синхронизации. В качестве автономного источника можно использовать задающий генератор приема с высокой стабильностью. Методы принудительной синхронизации могут быть основаны на использовании отдельного канала (по которому передаются синхросигналы, необходимые для подстройки задающего генератора приема) или информационной (рабочей) последовательности. Использование первого метода требует снижения пропускной способности рабочего канала за счет выделения дополнительного синхроканала. Поэтому на практике чаще всего используется второй метод. В качестве примера рассмотрим два вида устройств с принудительной синхронизацией по информационной последовательности: с непосредственным воздействием на задающий генератор и без непосредственного воздействия на задающий генератор. На рис. 3.1 изображена структурная схема устройства синхронизации с непосредственным воздействием на задающий генератор. 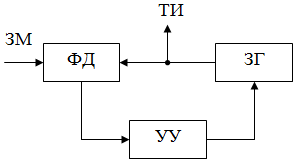 Рисунок 3.1 - Структурная схема устройства синхронизации с непосредственным воздействием на задающий генератор В фазовом дискриминаторе (ФД) осуществляется сравнение по фазе значащих моментов (ЗМ) принимаемого сигнала с тактовыми импульсами (ТИ), вырабатываемыми ЗГ. При расхождении по фазе ФД вырабатывает сигнал фазового рассогласования. Устранение обнаруженного ФД фазового рассогласования осуществляется в устройстве управления (УУ), которое в зависимости от величины и знака сигнала фазового рассогласования вырабатывает управляющий сигнал, воздействующий непосредственно на один из параметров ЗГ, изменяя его частоту, а следовательно, и фазу вырабатываемых им тактовых импульсов в нужную сторону, т.е. сводит к нулю расхождение фаз. Для уменьшения влияния помех и искажений, приводящих к случайному отклонению фазы, часто между ФД и УУ включается усредняющее устройство, устраняющее ложное регулирование ЗГ, которое снижает точность синхронизации. Общим недостатком устройств синхронизации с непосредственным воздействием на задающий генератор является невысокая точность синхронизации. Это связано с уменьшением стабильности задающего генератора примерно на порядок вследствие воздействия на один из его параметров. От этого недостатка свободны устройства синхронизации без непосредственного воздействия на задающий генератор, в которых фаза подстраивается в промежуточном преобразователе (ПП). Поэлементная синхронизация с добавлением и вычитанием импульсов (принцип действия) Структурная схема устройства синхронизации без непосредственного воздействия на задающий генератор приведена на рис. 3.2. 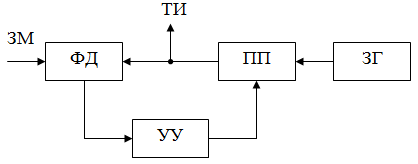 Рисунок 3.2 - Структурная схема устройства синхронизации без непосредственного воздействия на задающий генератор Состав и назначение блоков данной схемы аналогичны приведенной на рис. 3.1, за исключением того, что управляющий сигнал подается не непосредственно на ЗГ, а на ПП. В ПП фаза тактовых импульсов изменяется при неизменной частоте ЗГ. В качестве ПП чаще всего используется делитель частоты (ДЧ) следования импульсов. Процесс изменения фазы тактовых импульсов можно пояснить структурной схемой на рис. 3.3 и временными диаграммами, приведенными на рис. 3.4. 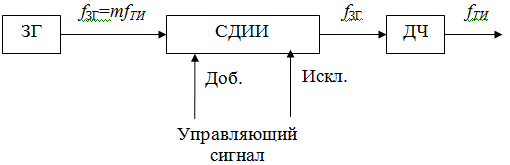 Рисунок 3.3 - Процесс изменения фазы тактовых импульсов 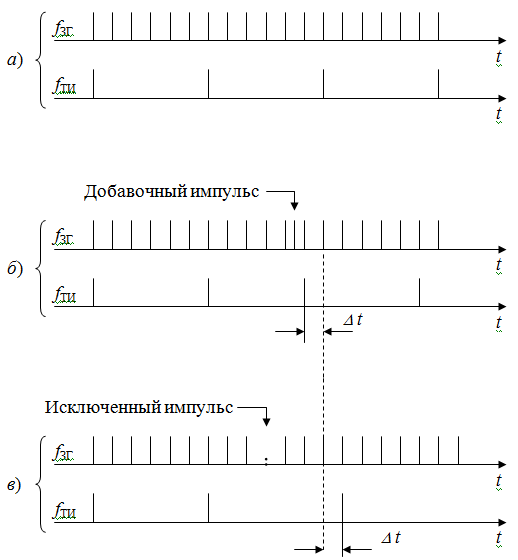 Рисунок 3.4 – Временные диаграммы Последовательность импульсов, вырабатываемая ЗГ с частотой следования fЗГ=mfТИ, подается на схему добавления и исключения импульсов (СДИИ). При отсутствии управляющего сигнала с выхода УУ эта последовательность импульсов делится до частоты fТИ делителем с коэффициентом деления m (рис. 3.4, а). Для примера на рис. 3.4,а приведено устройство с m=6. В этом случае на выход выдается каждый шестой импульс ЗГ. При наличии отставания фазы ТИ от ЗМ принимаемого сигнала ФД вырабатывает сигнал фазового рассогласования, который вызывает появление на выходе УУ сигнала добавления импульса. Добавочный импульс на должен совпадать во времени с импульсами ЗГ и располагаться между ними. В результате фаза ТИ сместится в сторону опережения (влево по оси времени) на величину, равную одному периоду колебаний ЗГ (рис. 3.4, б). В случае опережения ФД вырабатывает сигнал фазового рассогласования, который приводит к появлению на выходе УУ сигнала исключения одного из импульсов ЗГ. В результате фаза ТИ сместится в сторону отставания (вправо по оси времени) на ту же величину (рис. 3.4, в). Таким образом, путем добавления и исключения импульсов с выхода ЗГ можно легко изменять фазу ТИ в нужную сторону. Параметры системы синхронизации с добавлением и вычитанием импульсов К основным параметрам устройств относятся: Погрешность синхронизации – величина, выражающая в долях от t0 и равная наибольшему отклонению синхроимпульсов (импульсы стробирования) от их оптимального (модельного) положения. Погрешность синхронизации целесообразно рассматривать как сумму двух погрешностей: статической погрешности синхронизации  , определяемой нестабильностью задающего генератора и шагом коррекции; , определяемой нестабильностью задающего генератора и шагом коррекции;динамической погрешности  , вызываемой краевыми искажениями единичных элементов: , вызываемой краевыми искажениями единичных элементов:Время синхронизации (tс) – время необходимое для корректирования первоначального отклонения синхроимпульсов относительно границ принимаемых импульсов. Время поддержания синхронизации (tпс) – время, в течение которого отклонение синхроимпульсов от границ входных импульсов не выйдет за допустимый предел рассогласования ± εдоп при прекращении работы устройство синхронизации по подстройке фазы. Вероятность срыва синхронизации/синхронизма (Pcc) – вероятность того, что из-за действия помех отклонение синхроимпульсов от границ входных импульсов превысит t0 /2. Общая погрешность:  , , где ∆  – шаг коррекции, – шаг коррекции, | ||||||||||||||||||||