Курсовой проект По дисциплине Теоретические основы автоматики и телемеханики
 Скачать 499.84 Kb. Скачать 499.84 Kb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральноегосударственное бюджетное образовательное учреждение высшего образования «Петербургский государственный университет путей сообщения Императора Александра I» (ФГБОУ ВО ПГУПС) Факультет: «Безотрывных форм обучения» Кафедра «Автоматика и телемеханика на железных дорогах» Курсовой проект По дисциплине «Теоретические основы автоматики и телемеханики» Выполнил: Верхотурцев М.В. Группа: АС-601з Санкт-Петербург 2020 год Содержание1. Схема с нейтральными реле 3 3. Схема с реле с мостовым контактом 8 4. Назначение и краткая характеристика кодовых телемеханических систем 11 5. Назначение и виды распределителей 15 Вывод 19 Список литературы 20 1 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ;
; ;
; ;
; ;
;| | | |  | |||
| A | B | C | 00 | 01 | 10 | 11 |
| 0 | 0 | 0 | (000) | 010 | (000) | 010 |
| 0 | 0 | 1 | 000 | 000 | 000 | 000 |
| 0 | 1 | 0 | 000 | 110 | 100 | (010) |
| 0 | 1 | 1 | 000 | 100 | 100 | 000 |
| 1 | 0 | 0 | 001 | 011 | (100) | (100) |
| 1 | 0 | 1 | 001 | 001 | 100 | 100 |
| 1 | 1 | 0 | 001 | 111 | 100 | 100 |
| 1 | 1 | 1 | 001 | 101 | 100 | 100 |
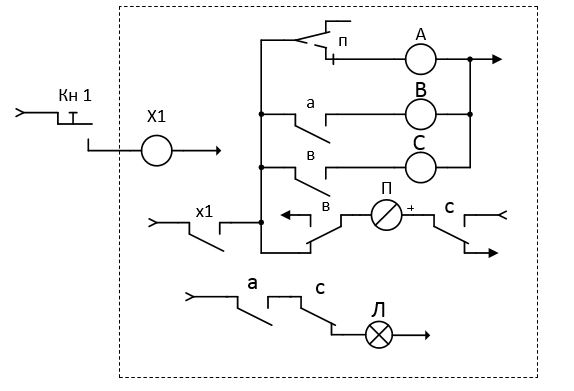
Из таблицы 2 видно, что схема не переходит в устойчивое состояние при нажатой кнопке Х2 и отпущенной Х1.
Т
аблица 2. Таблица выходов
| | | | | |||
| A | B | C | 00 | 01 | 10 | 11 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 0 | 1 | 1 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 1 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 | 1 | 0 | 1 |
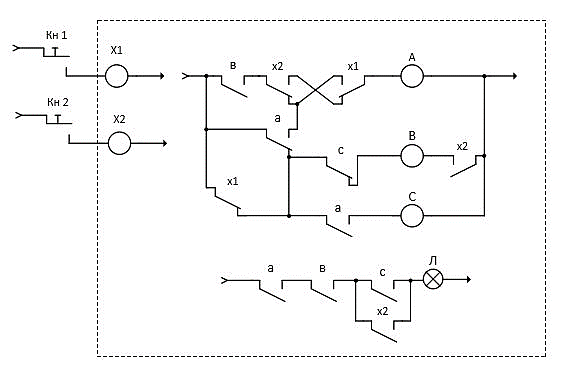
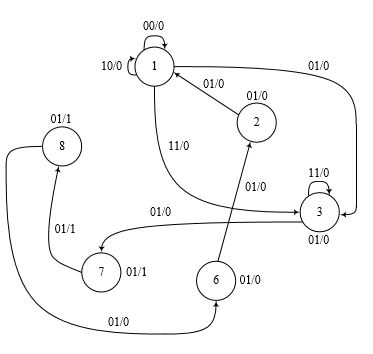
Рис.2. Граф переходов для схемы с нейтральными реле
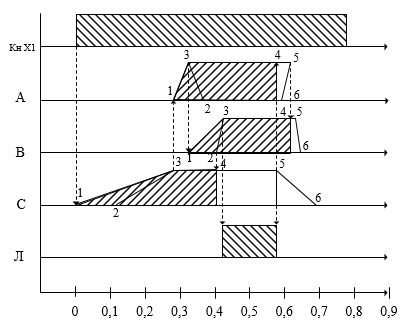
Временная диаграмма:
При построении временной диаграммы видно, что реле В работает очень малое время, в результате чего импульс очень маленький по времени. И, к тому-же, оно опускает свои контакты раньше, чем притянет реле С свои фронтовые контакты.
Р
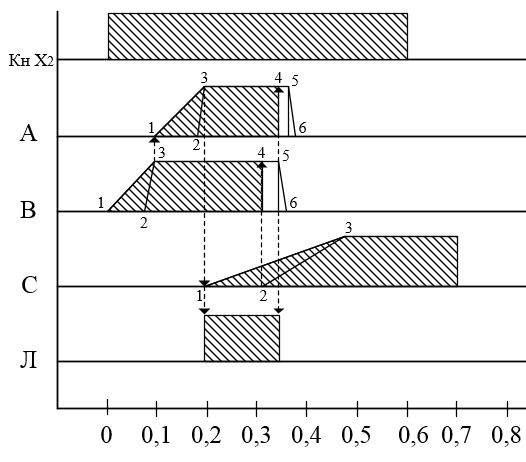
ис.3. Временная диаграмма нейтральных реле без замедления
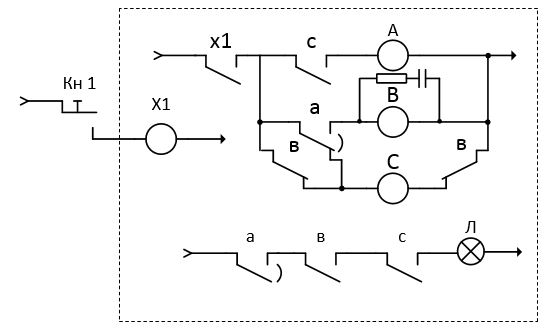
Д
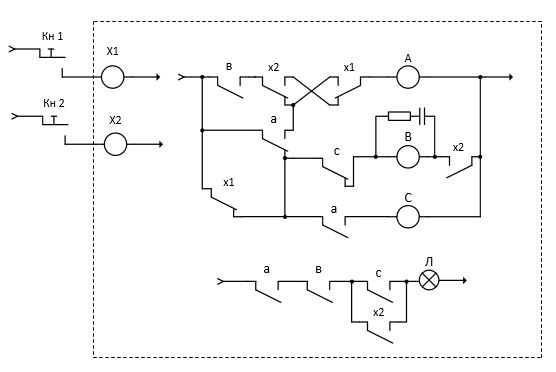
ля увеличения времени работы реле В был установлен конденсатор и резистор параллельно обмотке, в результате чего время импульса увеличилось. Временная диаграмма представлена в приложении.
Рис. 4. Принципиальная схема с включённым конденсатором
Время замедления рассчитано по формуле:
Где:
С – ёмкость конденсатора (1000мкФ);
R– сопротивление обмотки (1800 Ом);
Iот – ток отпускания контактов реле (6,4 мА);
r – сопротивление резистора (1кОм);
Uр – рабочее напряжение реле (24В);

Данные занесены в таблицу 3.
Таблица 3. Временные параметры схемы
| tимп, с | tинт, с | F, Гц | Реле с замедлением | Тип замедления | Время замедления |
| 0,17 | - | - | В | конденсатор | 0,8 с |
| tимп, расч., с | tинт, расч., с | F расч., Гц | tимп, экспер., с | tинт, экспер., с | F экспер., Гц |
| 0,96 | 1,26 | 0,7 | | | |
2
. Схема с поляризованным реле
Рис. 5. Принципиальная схема с поляризованным реле
ФАЛ схемы:
 ;
;



По временной диаграмме, представленной в приложении, видно, что работа схемы происходит нормально. Внесения элементов задержки не требуется. Данные занесены в таблицу 4.
Таблица 4. Временные параметры схемы
| tимп, с | tинт, с | F, Гц | Реле с замедлением | Тип замедления | Время замедления |
| 0,18 | 0,65 | 1,2 | - | - | - |
| tимп, расч., с | tинт, расч., с | F расч., Гц | tимп, экспер., с | tинт, экспер., с | F экспер., Гц |
| - | - | - | | | |
3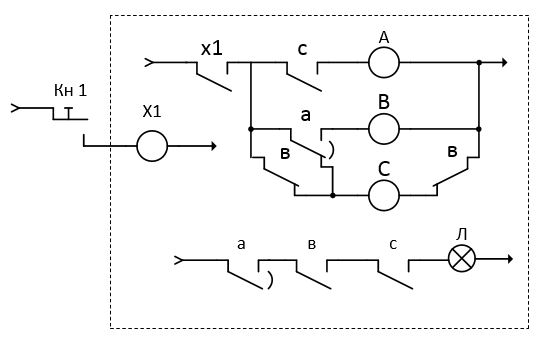
. Схема с реле с мостовым контактом
Рис.6. Принципиальная схема нейтральных реле с реле А с мостовым контактом
ФАЛ схемы:
 ;
; 

Таблица 5. Совмещённая таблица переходов и выходов
| | | |  | |
| А | В | С | 0 | 1 |
| 0 | 0 | 0 | (000), 0 | 001, 0 |
| 0 | 0 | 1 | 000, 0 | 101, 0 |
| 0 | 1 | 0 | 000, 0 | 000, 0 |
| 0 | 1 | 1 | 000, 0 | 100, 0 |
| 1 | 0 | 0 | 000, 0 | 011, 0 |
| 1 | 0 | 1 | 000, 0 | 111, 0 |
| 1 | 1 | 0 | 000, 0 | 010, 0 |
| 1 | 1 | 1 | 000, 0 | 110, 1 |
Р
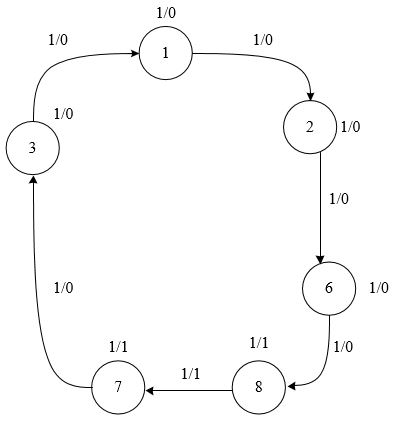
ис.7. Граф переходов
И
з временной диаграммы видно, что реле В опустит свои контакты раньше, чем реле С притянет свои фронтовые. Поэтому, была введена задержка в виде подключённых конденсаторов и резистора параллельно обмотке реле В. Временная диаграмма с задержкой представлена в приложении.
Рис.8. Временная диаграмма без временной задержки
Р
ис.9. Принципиальная схема с включённым конденсатором и резистором
Время замедления рассчитано по формуле:
Таблица 6. Временные параметры схемы
| tимп, с | tинт, с | F, Гц | Реле с замедлением | Тип замедления | Время замедления |
| 0,15 | 1,2 | 0,7 | В | конденсатор | 0,8 с |
| tимп, расч., с | tинт, расч., с | F расч., Гц | tимп, экспер., с | tинт, экспер., с | F экспер., Гц |
| 0,15 | 1,2 | 0,7 | | | |
4. Назначение и краткая характеристика кодовых телемеханических систем
В системах телемеханики происходит передача по каналам связи команд управления и контроля в виде сообщений. Для исключения искажений сообщений применяется кодирование.
Кодирование - преобразование дискретного сообщения в дискретный сигнал по определенному правилу: N=qn. Обратный процесс - декодирование - осуществляется на выходе КС с учетом правил кодирования.
Множество всех кодовых последовательностей, возможных при данном правиле кодирования, называется кодом.
В системах телемеханики используются, как правило, равномерные коды, которые могут быть непомехозащищенными или помехозащищенными.
Структура системы телемеханики для передачи сообщений по общей линии связи определяется совокупностью блоков, обеспечивающих функциональное преобразование множества сообщений N в множество сигналов, различающихся импульсными признаками.
В зависимости от способа разделения сигналов (частотного, временного, частотно-временного, кодового) определяются функции и структура системы.
2. определение функционального назначения основных реле в системах ИП и РП.
Н – начинающее реле;
В – выключающее реле;
ПП – реле передатчик плюсового импульса;
МП – реле передатчик минусового импульса;
Л – линейное реле, определяет начало и конец импульсов;
1С÷5С –счётчики, которые служат для поэлементного разделения кодового сообщения;
Р – разделительное реле, обеспечивает цепи включения чётных и нечётных счётчиков;
М – медленнодействующее реле, контролирует длительность интервала при передаче кодового сообщения;
Л1 и Л2 – линейные реле, декодеры полярных признаков импульсов;
1И÷4И – поляризованные реле;
3. Запись заданного приказа П
Запись кода n=3 (0010)

+
+
+
+
-
4. Запись табличным способом РП
| | Реле в схемах РП | ||||||||||||
| з3 | Н | ПП | МП | Л | Р | В | 1С | 2С | 3С | 4С | 5С | М | |
| 1 | | | | | | | | | | | | | |
| 2 | | | | | | | | | | | | | |
| 3 | | | | | | | | | | | | | |
| 4 | | | | | | | | | | | | | |
| 5 | | | | | | | | | | | | | |
| 6 | | | | | | | | | | | | | |
| 7 | | | | | | | | | | | | | |
| 8 | | | | | | | | | | | | | |
| 9 | | | | | | | | | | | | | |
| 10 | | | | | | | | | | | | | |
| 11 | | | | | | | | | | | | | |
5. Запись с помощью временной диаграммы работы ИП
6. Запись числа 203 в коде Хэмминга
m=8; k=4; n=12; 203=110010112
| Обозначение символов | U12 | U11 | U10 | U9 | К8 | U7 | U6 | U5 | К4 | U3 | К2 | К1 |
| Двоичный код числа 203 | 1 | 1 | 0 | 0 | | 1 | 0 | 1 | | 1 | | |
| Контр.разр. | | | | | 0 | | | | 1 | | 1 | 0 |
| Число 203 в коде Хэмминга | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 0 |
К1= U3 ⊕ U5 ⊕ U7⊕ U9 ⊕ U11=0
К2= U3 ⊕ U6 ⊕ U7 ⊕ U10 ⊕ U11=1
К4= U5 ⊕ U6 ⊕ U7 ⊕ U12=1
К8= U9 ⊕ U10 ⊕ U11 ⊕ U12=0
7. Дешифрация кодовой комбинации
767310=1111101110112
| U12 | U11 | U10 | U9 | К8 | U7 | U6 | U5 | К4 | U3 | К2 | К1 |
| 1 | 1 | 1 | 1 | | 0 | 1 | 1 | 1 | 0 | 1 | 1 |
S1= К1⊕U3⊕U5⊕U7⊕U9⊕U11=0
S2= К2⊕U3⊕U6⊕U7⊕U10⊕U11=0
S3= U5⊕U6⊕U7⊕U12⊕К4=0
S4= К8⊕U9⊕U10⊕U11⊕U12=1
10002 = 810 – ошибка в восьмом разряде
Число после исправления 111101102=24610
8. Возможные кодовые слова равновесного кода
m=3, n=4 (m-число постоянных нулей или единиц, n-количество разрядов в коде)
 комбинации
комбинации| 0111 | 1101 |
| 1011 | 1110 |
5. Назначение и виды распределителей
Распределители импульсов широко применяются в системах автоматики, телемеханики и вычислительной техники. По линиям связи систем ТУ–ТС осуществляется передача на расстояние управляющей и известительной информации. Например, передача приказов на установку маршрута и открытие сигналов на промежуточных станциях и извещения об их положении.
Носителями информации является электрические сигналы - импульсы тока с различными качествами: полярностью, длительностью и др. Наиболее часто используются два вида разделения сигналов друг от друга - линейное, при котором каждый импульс тока передается по отдельному каналу связи и времени, при котором импульсы тока разделяются во времени.
Временное разделение сигналов обеспечивает минимальное число физических каналов, так как заменяет их временными каналами. Оно обеспечивается в системах ТУ–ТС с помощью распределителей, которые устанавливаются на распределительном (РП) и исполнительном (ИП) пунктах. Распределители работают синхронно и синфазно и выделяют временные каналы для передачи соответствующих импульсов тока, т.е. практически осуществляют поочередное одновременное подключение соответствующих импульсов тока, осуществляющих передачу (на РП) и приём (на ИП). Синхронизация работы распределителей осуществляется либо с помощью специального канала синхронизации, либо непосредственно по рабочему каналу.
С функциональной точки зрения распределитель осуществляет пространственно-временное преобразование импульсов. На вход распределителя поступают импульсы движения (управления) от генератора (на РП) или из линии связи (на ИП). Число выходов (позиции) распределителя определяется числом посылаемых в линию связи импульсов.
В зависимости от момента перехода с одной позиции на другую различают распределители прямого, обратного и двойного хода. Распределители прямого хода переходят из одной позиции в другую во время импульсов, обратного хода - во время интервалов, двойного хода - во время и импульсов и интервалов.
По режиму работы распределители различают с непрерывным и стартстопным движением. Первые работают непрерывно и независимо от наличия или отсутствия передачи информации в системе ТУ–ТС. Вторые начинают работу после воздействия пускового (стартового) импульса и прекращают работу после окончания передачи различных схем.
2
. Временная диаграмма работы распределителя с обратным ходом при поступлении на его вход шестнадцати интервалов.
3. Временная диаграмма и таблица работы программируемого распределителя
В данной работе распределитель настраивается соединением X2 – S4.
Таблица работы программируемого распределителя
| Импульс | Вес разряда | |||
| 23 (Х4) | 22 (Х3) | 21 (Х2) | 20 (Х1) | |
| 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 1 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 12 | 1 | 1 | 0 | 0 |
| 13 | 1 | 1 | 0 | 1 |
| 14 | 1 | 1 | 1 | 0 |
| 15 | 1 | 1 | 1 | 1 |
4. Описание работы распределителя при пробое диода 13–
 .
.Не будут гореть лампы: 0, 1, 4, 5, 8, 9, 12.
Работа на примере четвёртой лампы. Путь протекания тока по четвёртой лампе идёт от +Uп на четвёртую шину к лампе, далее ток уходит из этой шины через диод 4–
(так как сопротивление этой шины меньше из-за пробитого диода), далее в тринадцатую шину через диод 13– . Из этой шины ток уходит в первый и четвёртый триггеры через диод 13– и 13–
и 13– соответственно (так как данные диоды не закрываются, потому что в шинах Х1 и Х4 отсутствует потенциал на катодах диодов).
соответственно (так как данные диоды не закрываются, потому что в шинах Х1 и Х4 отсутствует потенциал на катодах диодов).Тринадцатая лампа загорится, так как в шину
будет подан положительный потенциал и ток пойдёт от +Uп к –Uп через тринадцатую лампу.5. Нарисовать схему двоичного счётчика на пяти триггерах R-S-T типа и одну выходную шину с диодами.
По заданию необходим выход матрицы под номером 5.
| Х4 | Х3 | Х2 | Х1 | Х0 |
| 0 | 0 | 1 | 0 | 1 |
Вывод
В представленной работе были проанализированы три схемы. При анализе схемы нейтральных реле выявлено, что реле В опускало свои фронтовые контакты раньше, чем притягивало свои фронтовые контакты реле С и оно отключается. Для данного исключения был включён конденсатор с резистором параллельно обмотке реле В, в результате чего Реле В отключаться стало позднее и реле С полностью срабатывало и увеличилось время импульса. Схема с поляризованным реле работает стабильно без введения задержек. В схеме с мостовым контактом ситуация такая же, как и в схеме с нейтральными реле. Здесь также была введена задержка в виде конденсатора и резистора.
Список литературы
Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. «Теоретические основы железнодорожной автоматики и телемеханики: Учебник для вузов ж.-д. транспорта/ Под редакцией В.В. Сапожникова. – М.:ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2008. – 394с.»
"Электронные устройства ж/д автоматики, телемеханики и связи": Учебник для вузов ж/д транспорта - В. Шилейко, 1989,-327с.
«Исследование режимов работы многоконтактных релейных устройств»: Методические указания к выполнению задания по курсу «Основы железнодорожной автоматики и телемеханики» - Сапожников Вл.В., Сапожников В.В., Кузьмин О.И. - СПб 2000 г.
http://www.microshemca.ru/