периферійніпристрої. Лабораторна робота 3 з дисципліни Периферійні пристрої тема роботи Дослідження систем позиціонування магнітних головок накопичувачів
 Скачать 461.47 Kb. Скачать 461.47 Kb.
|

|
Міністерство освіти і науки України Національний авіаційний університет Факультет кібербезпеки, комп'ютерної та програмної інженерії Кафедра комп’ютерних систем та мереж Лабораторна робота №3 з дисципліни «Периферійні пристрої» тема роботи: «Дослідження систем позиціонування магнітних головок накопичувачів»
Мета роботи: ознайомитись із конструкцією та принципом роботи механізмів позиціювання магнітних головок накопичувачів на жорстких магнітних дисках. Завдання: Ознайомитись з конструкцією приводів з кроковим двигуном і рухомою катушкою. Зробити порівняльний аналіз механізмів. Контрольні запитання: Для чого призначені механізми позиціювання? У пристроях з рухливою котушкою немає заздалегідь зафіксованих положень. Саме через це в них використовується спеціальна система наведення (позиціонування), що точно підводить голівки до потрібного циліндра (тому привод з рухливою котушкою може плавно переміщати голівки в будь-які положення). Ця система називається сервоприводом, і основна її відмінність полягає в тому, що для точного наведення (позиціонування) голівок використовується сигнал зворотного зв'язку, що несе інформацію про реальне взаємне розташування доріжок і голівок. Цю систему часто називають системою зі зворотним зв'язком (або з автоматичним регулюванням). Отже механізми позиціонування призначені для переміщення магнітних голівок накопичувачів. Які існують типи механізмів позиціювання? Ще більш важливою деталлю накопичувача, чим самі голівки, є механізм, що встановлює їх у потрібне положення і називається приводом голівок. Саме з його допомогою голівки переміщаються від центра диска до його країв і встановлюються на заданий циліндр. Існує багато конструкцій-механізмів привода голівок, але їх можна розділити на два основних типи: - Привід з кроковим двигуном; - Привід з котушкою, що рухається (звукова котушка). Що таке кроковий двигун? Кроковий двигун – це електродвигун, ротор якого може обертатися тільки ступінчато, на суворо визначений кут. Якщо покрутити його вал вручну, то можна отримати неголосні щиглики (або тріск при швидкому обертанні), що виникають усякий раз, коли ротор проходить через чергове фіксоване положення. 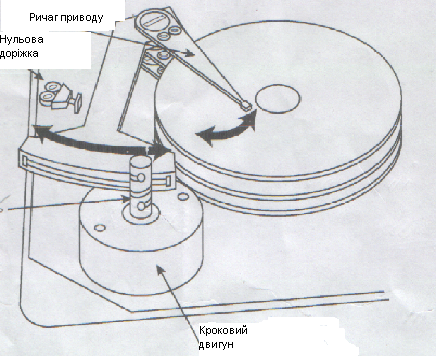 Який принцип роботи приводу "звукова котушка"? Привід «звукова котушка» працює за принципом електромагнетизму. Його конструкція нагадує конструкцію звичайного гучномовця. Як відомо, у гучномовці рухлива котушка, з'єднана з дифузором, може переміщатися в зазорі постійного магніту. При протіканні через котушку електричного струму вона зміщається разом з дифузором щодо постійного магніту. Якщо струм у котушці періодично змінюється (у відповідності зі звуковим електричним сигналом), то виникаючі при цьому коливання дифузора породжують сприйманий людиною звук. У типовій конструкції привода рухлива котушка жорстко з'єднується з блоком голівок і розміщається в поле постійного магніту. Котушка і магніт ніяк не зв'язані між собою; переміщення котушки здійснюється тільки під впливом електромагнітних сил. З появою в котушці електричного струму вона так само, як і в гучномовці, зміщається відносно жорстко закріпленого постійного магніту, пересуваючи при цьому блок голівки. Подібний механізм виявляється досить швидкодіючим і не настільки гучним, як привод із кроковим двигуном. На відміну від привода з кроковим двигуном, у пристроях з рухливою котушкою немає заздалегідь зафіксованих положень. Замість цього в них використовується спеціальна система наведення (позиціонування), що точно підводить голівки до потрібного циліндра (тому привод з рухливою котушкою може плавно переміщати голівки в будь-які положення). Ця система називається сервоприводом, і основна її відмінність від раніше розглянутої полягає в тому, що для точного наведення (позиціонування) голівок використовується сигнал зворотного зв'язку, що несе інформацію про реальне взаємне розташування доріжок і голівок. Цю систему часто називають системою зі зворотним зв'язком (або з автоматичним регулюванням). Які існують типи приводів з рухомою котушкою? Лінійний та поворотний. Вони відрізняються тільки фізичним розташуванням магнітів і котушок. Лінійний привод з рухомою катушкою: 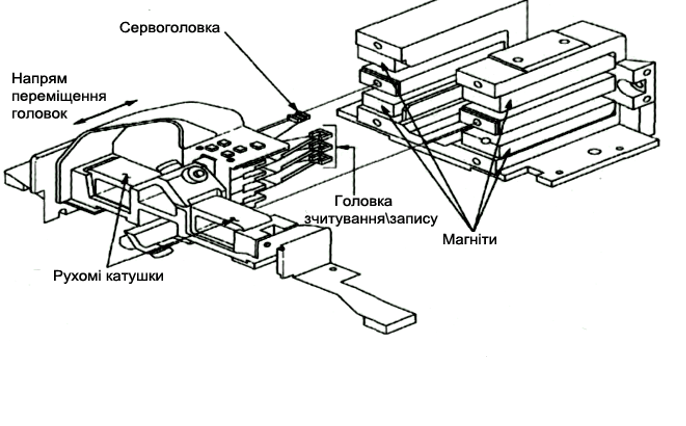 Який принцип дії лінійного приводу? Лінійний привід переміщує голівки по прямій лінії суворо вздовж смуги радіуса диска. Котушки розташовуються в зазорах постійних магнітів. Головною перевагою лінійного приводу є те, що при його використанні не виникають азимутальні погрішності, характерні для поворотного приводу. (Під азимутом розуміється кут між площиною робочого зазору голівки і напрямком доріжки запису.) При переміщенні з одного циліндра на іншої голівки не повертаються і їхній азимут не змінюється. Однак у лінійного привода є істотний недолік: його конструкція занадто масивна. Щоб підвищити продуктивність накопичувача, потрібно знизити масу приводного механізму і самих голівок. Ніж легше механізм, тим з великими прискореннями він може переміщатися з одного циліндра на іншій. Лінійні приводи набагато важчі за поворотні, тому в сучасних накопичувачах вони не використовуються. Як функціонує поворотний привід? Поворотний привод працює по тому ж принципі, що і лінійний, але в ньому до рухливої котушки кріпляться кінці важелів голівок. При русі котушки щодо постійного магніту важелі переміщення голівок повертаються, пересуваючи голівки до осі або до країв дисків. Завдяки невеликій масі така конструкція може рухатися з великими прискореннями, що дозволяє істотно скоротити час доступу до даних. Швидкому переміщенню голівок сприяє і той факт, що плечі важелів робляться різними — те, на якому змонтовані голівки, має велику довжину. Висновки: в процесі виконання лабораторної роботи було розглянуто конструкцію та принципи роботи механізмів позиціювання магнітних головок накопичувачів на жорстких магнітних дисках, типи механізмів позиціювання, їхнє призначення. |