Лабораторная работа 1 Анализ работы ультразвукового датчика расстояния. Определение погрешностей По дисциплине Первичные преобразователи
 Скачать 111 Kb. Скачать 111 Kb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ ФГБОУ ВО «ОГУ ИМ. И.С. ТУРГЕНЕВА» Кафедра «Приборостроение, метрология и сертификация» Лабораторная работа №1 «Анализ работы ультразвукового датчика расстояния. Определение погрешностей» По дисциплине: «Первичные преобразователи» Выполнил студент группы 61-П Лоскутов И.А. Проверил к.т.н. доцент Сковпень Н.В. Орел, 2018 Введение Ультразвуковой датчик расстояния предназначен для измерения расстояний посредством расчета времени прохождения звука известной частоты. Данный вид измерения является косвенным, так как расстояние измеряется не непосредственно, а рассчитывается. 1 Функциональная схема датчика Функциональная схема датчика изображена на рисунке 1. 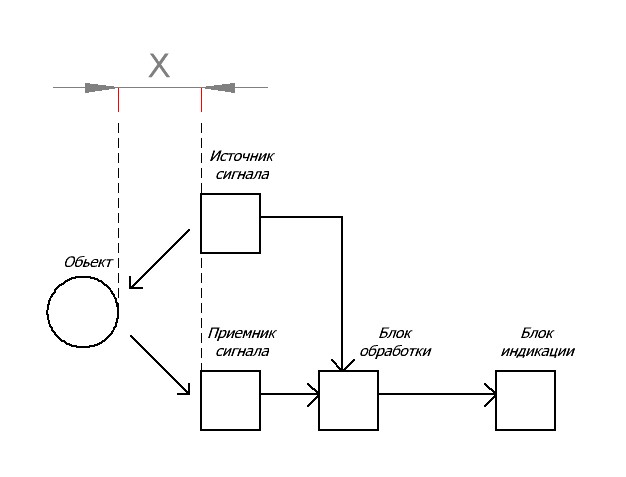 Рисунок 1 – Функциональная схема датчика Сигнал, испускаемый источником, попадает на объект, до которого измеряется расстояние, и отражается в сторону приемника, который расположен рядом с источником. Измеряемое расстояние X определяется по формуле: где v – скорость распространения звуковой волны, t – время прохождения сигнала от источника до объекта или от объекта до источника. Далее блок обработки фиксирует время прохождения сигнала от источника до приемника и косвенным методом рассчитывает расстояние X. Результат отображается в блоке индикации. 2 Оценка погрешности датчика Произведены измерения расстояний от 5 см до 150 см. Данные внесены в таблицу: Таблица 1 – Значение исходного, измеренных и их средних значений
В таблицу внесены по два значения измеренного расстояния, так как показания прибора колебались, а также рассчитаны средние значения измеренных расстояний. Показания прибора оказались меньшими по сравнению с исходными значениями расстояний. Согласно данным таблицы 1 строится гистограмма исходных и измеренных расстояний: 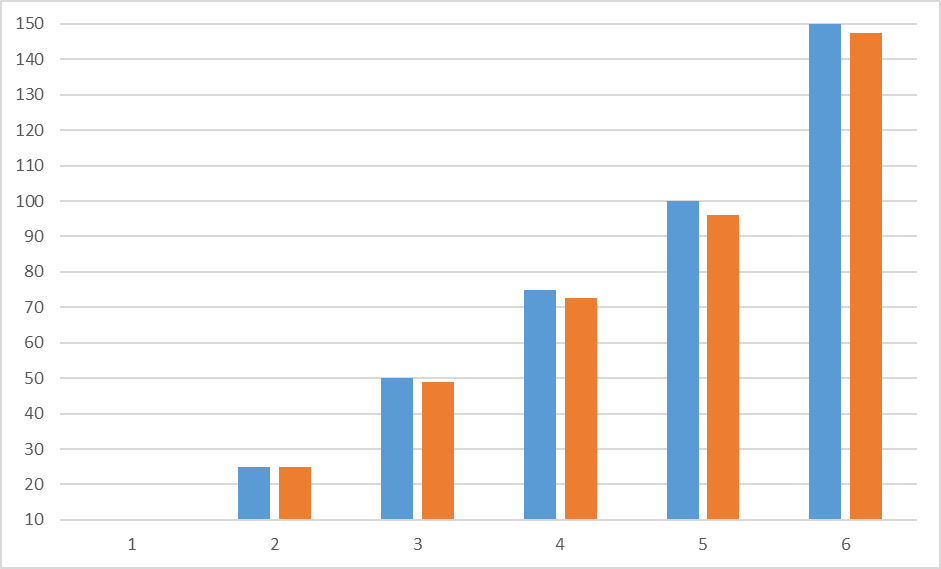 Рисунок 2 – Графическое представление исходного и измеренного расстояний Рассчитывается величина погрешности и заносится в таблицу 2. Таблица 2 – Погрешности
Согласно данным таблицы 2 строится график погрешности. 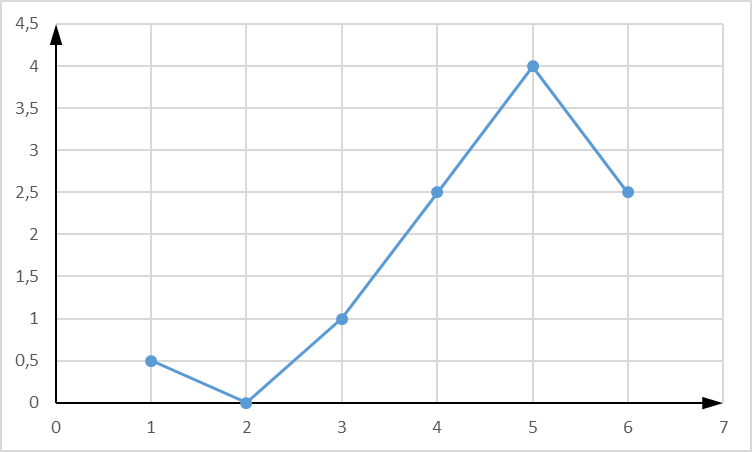 Рисунок 3 – График погрешности Так как погрешность имеет нелинейный характер и не является постоянной (аддитивной), то делается вывод, что погрешность при измерении расстояния данным ультразвуковым датчиком имеет и аддитивную и мультипликативную составляющую. Вывод Данный ультразвуковой датчик расстояния позволяет измерять расстояния в заданном диапазоне с погрешностью, теоретически не превышающей 4 см. Погрешность данного датчика имеет аддитивную и мультипликативную составляющую. |