Лаб_1. Лабораторная работа 1 Обеспечение инвариантности системы автоматического регулирования
 Скачать 0.71 Mb. Скачать 0.71 Mb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Сибирский государственный университет науки и технологий имени академика М.Ф. Решетнева» Институт информатики и телекоммуникаций Кафедра автоматизации производственных процессов Лабораторная работа №1 Обеспечение инвариантности системы автоматического регулирования Руководитель ___________ Г.И. Чмых подпись, дата Обучающийся Бат18-01, 18731008 Д.А.Аглиуллин номер группы, зачетной книжки подпись, дата Красноярск 2020 Методы расчета и уменьшения установившейся от возмущающего воздействия Цель работы: практическое освоение оценки установившейся ошибки и методов её уменьшения. Задачи работы: Ознакомиться: - с методикой расчета установившейся ошибки от возмущающего воздействия; - с методами уменьшения установившейся ошибки. Выполнить: - расчет установившейся ошибки при постоянном возмущении и возмущении, изменяющемся с постоянной скоростью; - расчет системы, инвариантной к возмущению; - построение в Vissim'e схем для исследования установившейся ошибки. Приобрести навыки: - экспериментального исследования методов уменьшения установившейся ошибки; - построения моделей статических, астатических и инвариантных систем в программе Vissim. Задание
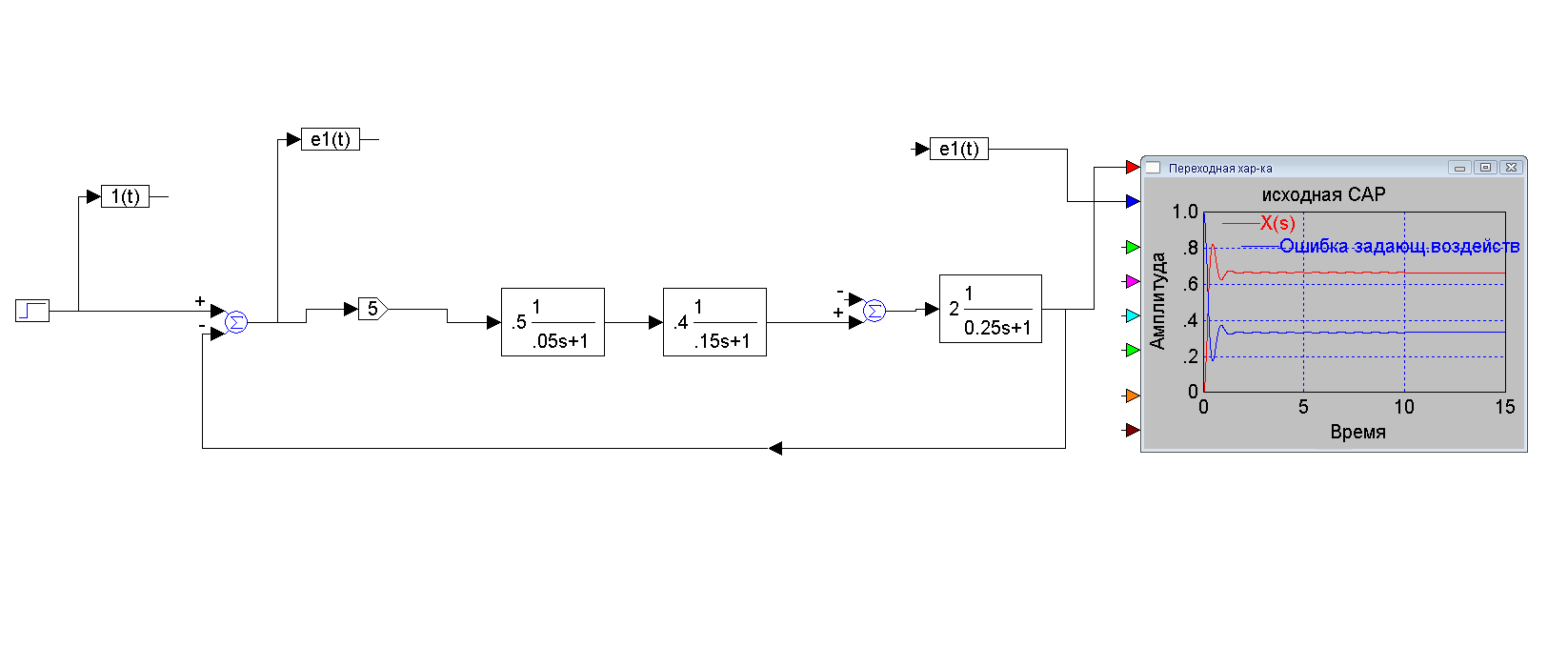
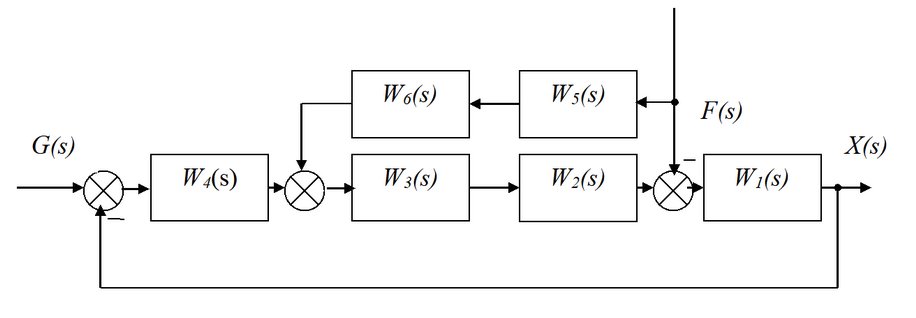
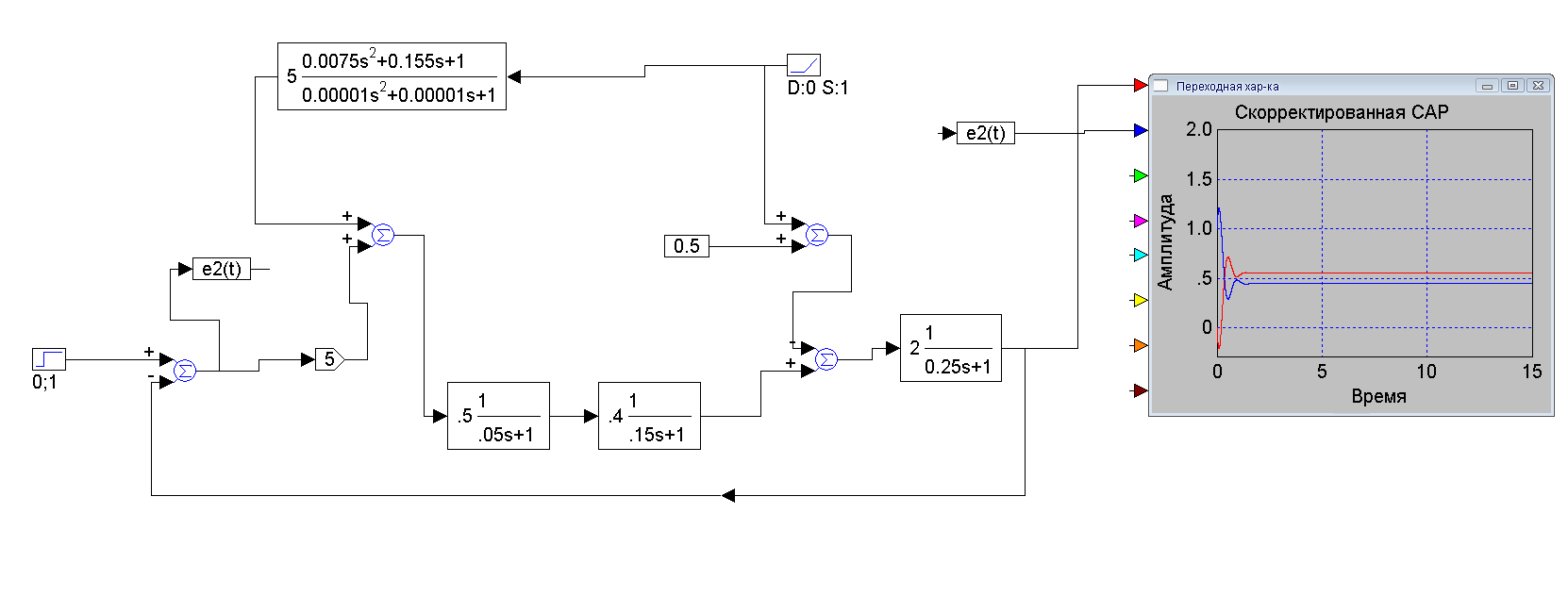
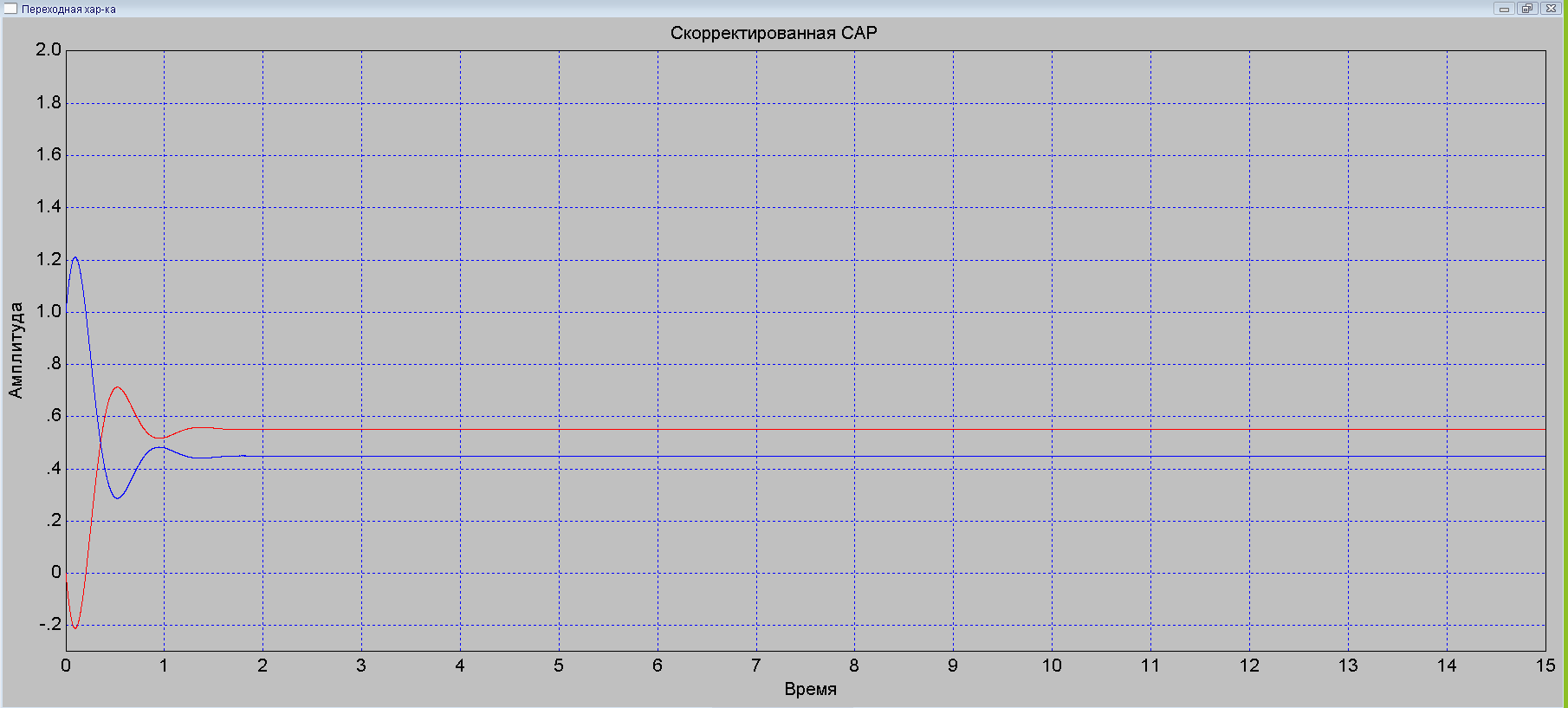
Собрать систему автоматического регулирования (рисунок 1) в среде VisSim. Передаточные функции звеньев выбрать согласно варианту: 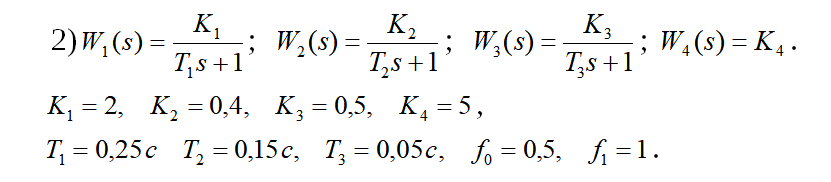 Проверить устойчивость системы, подав задающее воздействие в виде единичного ступенчатого воздействия. Если замкнутая система неустойчива, уменьшить коэффициент усиления К4 так, чтобы перерегулирование было не более 25%. Рассчитать установившуюся ошибку относительно возмущающего воздействии в системе автоматического регулирования (рисунок 1) при возмущающем воздействии f(t) =f0 и f(t) =f0+ f1t . Подать возмущающее воздействие f(t) =f0, измерить установившуюся ошибку, сравнить с расчетной, сделать вывод. При этом задающее воздействие равно нулю. Подать возмущающее воздействие f(t) =f0+ f1t, измерить установившуюся ошибку, сравнить с расчетной, сделать вывод. Обеспечить инвариантность ошибки к возмущающему воздействию введением компенсирующей цепи (рисунок 2). Записать условие полной инвариантности к возмущающему воздействию Определить передаточную функцию относительно выходной величины и ошибки при реализации компенсирующей цепи в виде форсирующего звена первого порядка. Определить установившуюся ошибку при выполнении компенсирующей цепи в виде реального форсирующего звена Собрать схему в среде VisSim, обеспечивающую инвариантность, измерить установившуюся ошибку, сравнить с расчетной, сделать выводы. Оглавление1Синтез системы автоматического регулирования в среде VisSim 5 2Определение запасов устойчивости 8 3Рассчет установившейся ошибки относительно возмущающего воздействия в системе автоматического регулирования 9 3.1При возмущающем воздействии f(t) =f0 9 3.2 при возмущающем воздействии f(t) =0,5+ 1t 11 4Обеспечение инвариантности ошибки к возмущающему воздействию путем введения компенсирующей цепи 12 Синтез системы автоматического регулирования в среде VisSim
Из рисунка 2 видно, что в контуре отсутствуют интеграторы, следовательно, система статическая. Разомкнутый контур:
прямая цепь =1  – связь единичная – связь единичнаяЗадающее воздействие:   Находим функцию ошибки по задающему воздействию
Статическая ошибка будет равна:
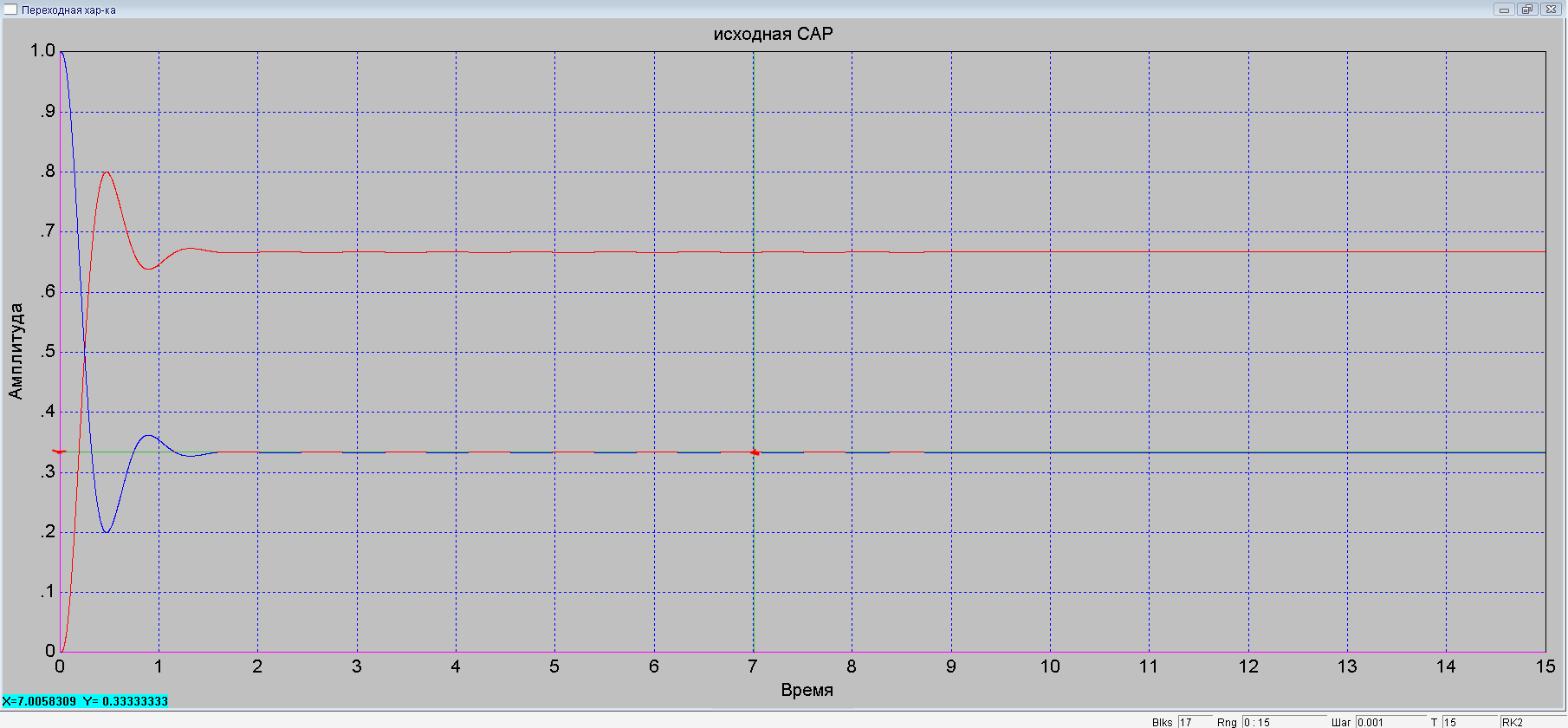
рисунка 1 видно что
ошибка g(t) = 0,3333 Определение запасов устойчивости
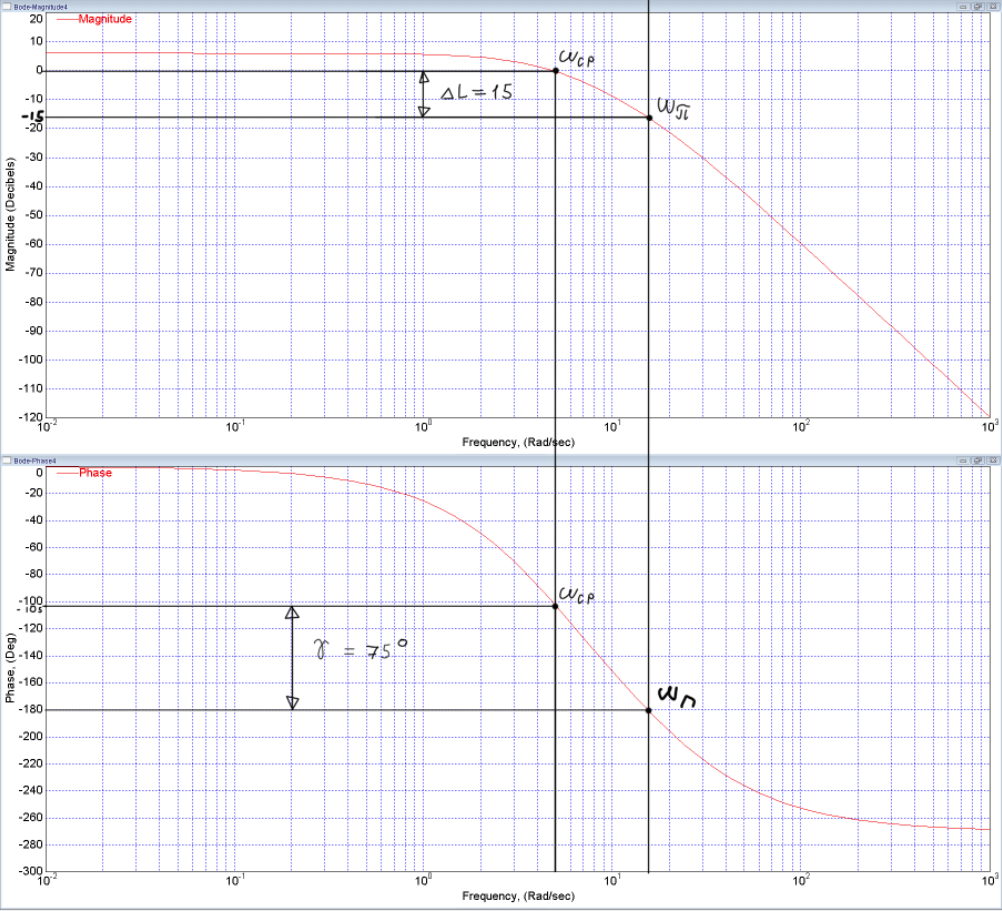
Из рисунка 2, запасы устойчивости по модулю ΔL=15 дБ, по фазе γ=75º Рассчет установившейся ошибки относительно возмущающего воздействия в системе автоматического регулирования При возмущающем воздействии f(t) =f0 Прямая цепь, входом является F(t), выходом E(t)
Находим функцию ошибки по возмущающему воздействию
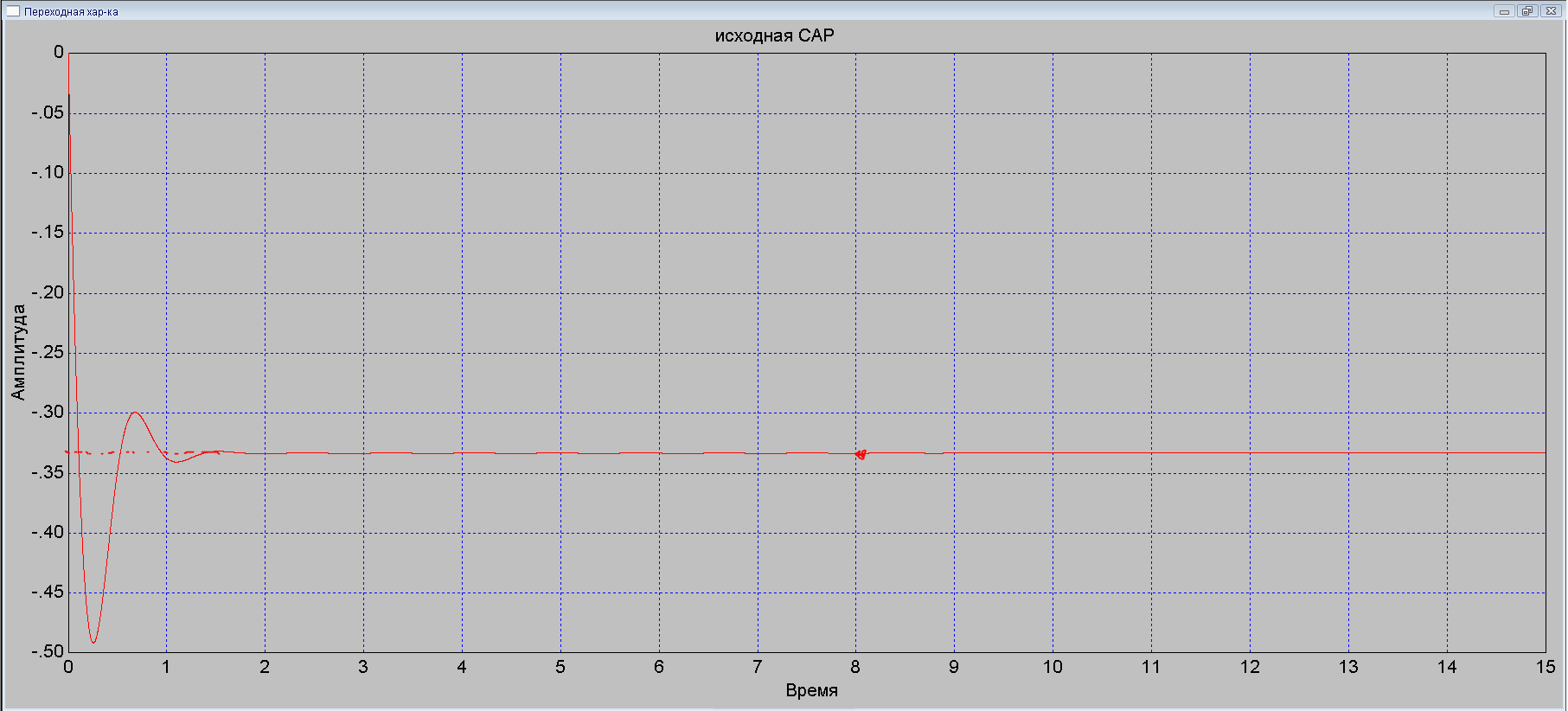
При постоянном возмущении f(t)=0,5 будет иметь место ошибка.
ошибка -0,334
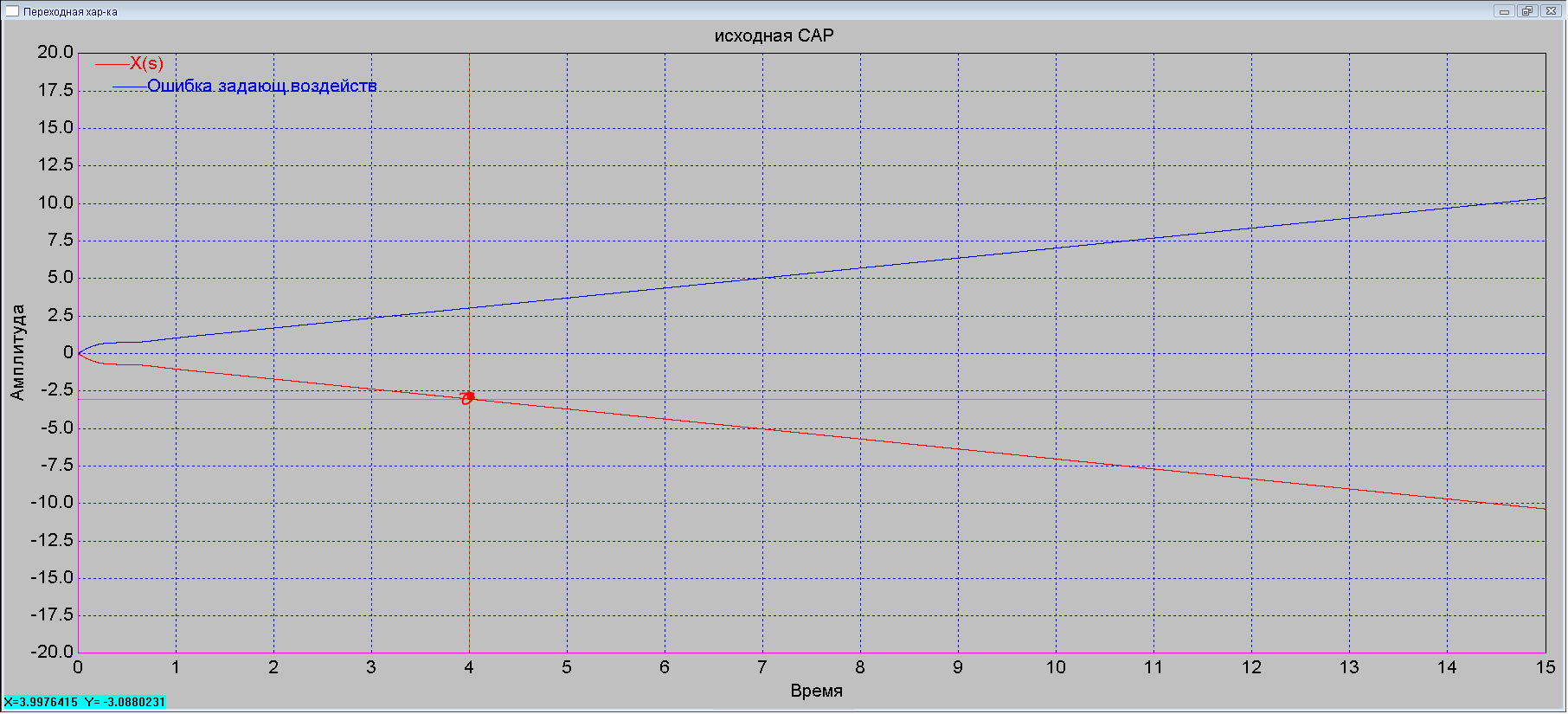
при возмущающем воздействии f(t) =0,5+ 1t (f(t))’ =(0,5+ 1t)’ = 1 при t=4 сек
ошибка снятая с графика в vissim = -3,088 Обеспечение инвариантности ошибки к возмущающему воздействию путем введения компенсирующей цепи
W2(s) – передаточная функция исполнительного устройства; W3(s), W4(s) – передаточная функция усилительно-преобразовательных устройств; дополнительная (компенсирующая) цепь воздействия включает W5(s) – измерительный элемент датчик возмущающего воздействия f(t) и W6(s) – преобразовательный элемент дополнительной цепи воздействия возмущения f(t). Эта дополнительная цепь должна компенсировать влияние f(t) на регулируемую координату x(t) и поэтому она называется компенсирующей. Составим передаточную функцию замкнутой системы по возмущению относительно регулируемой координаты х(t):
Равенство (13) является условием полной инвариантности от f(t). В данном случае преобразовательный элемент для полной инвариантности должен создавать первую и вторую производную сигнала f(t). Передаточная функция корректирующей цепи, удовлетворяющая условию
Реализуемая передаточная функция: 
Общая ошибка в установившемся режиме = 0,45 |