Лабораторная работа 3 Создание системы дистанционного управления
 Скачать 152.55 Kb. Скачать 152.55 Kb.
|

|
Лабораторная работа №3 Создание системы дистанционного управления Цель работы: реализовать систему автоматического управления находящуюся на удаленном расстоянии от объекта управления. Задание: Выбрать предметную область системы: такую, что объект управления и управляющее устройство дистанционно разнесены на дальнее расстояние. Описать структуру системы и все блоки, необходимые для работы. В любом доступном пакете смоделировать описанный процесс. Ведение Автоматическое управление широко применяется во многих технических и биотехнических системах для выполнения операций, неосуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительнойп недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины – выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта – управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Определения: Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Автоматическое управление – совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. Средства автоматического управления различными объектами непрерывно развиваются, в их состав попадают все более современные разработки. В последнее время широко распространилась технология передачи данных Wi-Fi. Данная технология позволяет передавать на достаточно большой скорости значительные объемы информации и, что самое ценное, без использования проводных линий связи. Открытые промышленные сети и стандарты PROFIBUS/NET компании Siemens Немецкий концерн Siemens давно известен своими программируемыми логическими контроллерами (ПЛК), которые используется по всему миру. Обмен данными между узлами автоматизированной системы под управлением оборудования Siemens реализуется как по полевой шине, которая называется PROFIBUS, так и в промышленной сети PROFINET. Шина PROFIBUS использует специальный двужильный кабель с разъемами DB-9. У Siemens он фиолетовый, но мы на практике встречали и другие :). Для связи нескольких узлов разъем может соединять два кабеля. Также в нем есть переключатель для терминального резистора. Терминальный резистор должен быть включен на концевых устройствах сети, таким образом сообщается, что это первое или последнее устройство, а после него уже ничего нет, только мрак и пустота (все rs485 так работают). Если на промежуточном разъеме включить резистор, то следующий за ним участок будет отключен.  Кабель PROFIBUS с соединительными разъемами. Источник: VIPA ControlsAmerica В сети PROFINET используется аналог витой пары, как правило, с разъемами RJ-45, кабель окрашен в зеленый цвет. Если топология PROFIBUS —шина, то топология сети PROFINET может представлять собой что угодно: хоть кольцо, хоть звезду, хоть дерево, хоть все вместе взятое.  Контроллер Siemens с подключенным кабелем PROFINET. Источник: w3.siemens.com Существуют несколько протоколов обмена по шине PROFIBUS и в сети PROFINET. Для PROFIBUS: PROFIBUS DP — реализация этого протокола подразумевает связь с удаленными подчиненными устройствами, в случае с PROFINET этому протоколу соответствует протокол PROFINET IO. PROFIBUS PA — является по сути тем же PROFIBUS DP, только используется для взрывобезопасных исполнений передачи данных и питания (аналог PROFIBUS DP с другими физическими свойствами). Для PROFINET взрывобезопасного протокола по аналогии с PROFIBUS пока не существует. PROFIBUS FMS — предназначен для обмена данными с системами других производителей, которые не могут использовать PROFIBUS DP. Аналогом PROFIBUS FMS в сети PROFINET является протокол PROFINET CBA. Для PROFINET: PROFINET IO; PROFINET CBA. Протокол PROFINET IO делится на несколько классов: PROFINET NRT (без реального времени) — используется в приложениях, где временные параметры не критичны. В нем используется протокол передачи данных Ethernet TCP/IP, а также UDP/IP. PROFINET RT (реальное время) — тут обмен данными ввода/вывода реализован с помощью фреймов Ethernet, но диагностические данные и данные связи все еще передаются через UDP/IP. PROFINET IRT (изохронное реальное время) — этот протокол был разработан специально для приложений управления движением и включает в себя изохронную фазу передачи данных. Что касается реализации протокола жесткого реального времени PROFINET IRT, то для коммуникаций с удаленными устройствами в нем выделяют два канала обмена: изохронный и асинхронный. Изохронный канал с фиксированной по времени длиной цикла обмена использует тактовую синхронизацию и передает критичные ко времени данные, для передачи используются телеграммы второго уровня. Длительность передачи в изохронном канале не превышает 1 миллисекунду. В асинхронном канале передаются так называемые real-time-данные, которые тоже адресуются посредством MAC-адреса. Дополнительно передается различная диагностическая и вспомогательная информация уже поверх TCP/IP. Ни real-time-данные, ни тем более другая информация, разумеется, не может прерывать изохронный цикл. Расширенный набор функций PROFINET IO нужен далеко не для каждой системы промышленной автоматики, поэтому этот протокол масштабируют под конкретный проект, с учетом классов соответствия или классов применения (conformance classes): СС-A, CC-B, CC-CC. Классы соответствия позволяют выбрать полевые устройства и магистральные компоненты с минимально необходимой функциональностью. 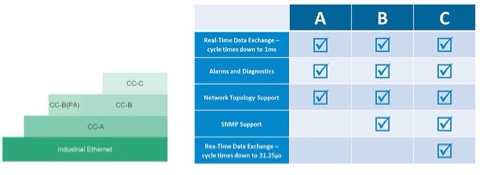 Второй протокол обмена в сети PROFINET — PROFINET CBA — служит для организации промышленной связи между оборудованием различных производителей. Основной производственной единицей в системах СВА является некая сущность, которая называется компонентом. Этот компонент обычно представляет собой совокупность механической, электрической и электронной части устройства или установки, а также соответствующее прикладное программное обеспечение. Для каждого компонента выбирается программный модуль, который содержит полное описание интерфейса данного компонента по требованиям стандарта PROFINET. После чего эти программные модули используются для обмена данными с устройствами.
Источники: https://moluch.ru/archive/16/1493/ https://vk.com/away.php?to=https%3A%2F%2Fhabr.com%2Fru%2Fpost%2F473992%2F&cc_key= |