лабораторная. Л 9 механотропный датчик. Лабораторная работа 9 Исследование механотронного датчика перемещений. Цель работы
 Скачать 190.1 Kb. Скачать 190.1 Kb.
|

|
ЛАБОРАТОРНАЯ РАБОТА №9 Исследование механотронного датчика перемещений. Цель работы: Ознакомиться с принципом действия механотронного датчика перемещений, построить графики зависимости анодного тока от расстояния между анодом и катодом, полученныя для постоянного напряжения:  Теоретическая часть.Для контроля и регулирования различных механических параметров в машиностроении, приборостроении, автоматике и других областям промышленности и техники широко используются электрические методы измерения неэлектрических величин. Различные механические величины, поступая на вход специальных устройств (преобразователей или датчиков) преобразуются или в ток или напряжение, а также в частоту-фазу или период электрических колебаний. К числу перспективных типов электромеханических датчиков относятся электронные ламповые преобразователи, действие которых основано на механическом управлении электронным током электровакуумных приборов. Наиболее обширной группой электронно-механических преобразователей является так называемые механотронные преобразователи или механотроны. Механотрон - это электронная лампа, электронным током которой управляют непосредственно механическим перемещением ее электродов. В связи с быстрым развитием электровакуумного приборостроения и техники электрических измерений, неэлектрических величин, механотроны стали предметом серьезных исследований. В ряде работ были установлены важные преимущества механотронных датчиков, работающих на постоянном токе, по сравнению с датчиками других типов. Была показана возможность создания механотронов, обладавших высокой чуствительностью, малым весом и размерами и отличающиеся простотой механических и электрических схем. Большие возможности механотронов позволяют надеяться на широкое развитие этих приборов в ближайшем будущем. Работа механотронного преобразователя в измерительной схеме.  Л 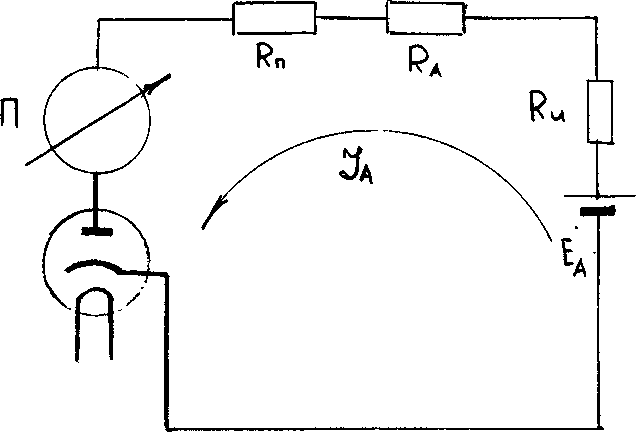 Рис.2. Измерительная схема с диодным механотроном. Простейшая измерительная схема на основе диодного механотрона представлена на рис.2. Она состоит из механотрона Л, анодной нагрузки RA, отечетного прибора П с внутренним сопротивлением RH и источника питания с внутренним сопротивлением RU , соединенных последовательно. Для этой схемы справедливо уравнение:  (1) (1)Так как при работе механотрона анодный ток является функцией двух переменных  то его полный дифференциал запишется в виде: то его полный дифференциал запишется в виде: (2) (2)где d - межэлектродное расстояние, изменяющееся при перемещении подвижного электрода механотрона. После подстановки в это уравнение статистических параметров механотрона  и и  оно примет вид: оно примет вид: (3) (3)Отсюда, используя уравнение (1) легко получить:  (4) (4)Последнее выражение представляет собой рабочую чувствительность по току механотрона, включенного по схеме рис.2. Для механотронного преобразователя определенного назначения этот параметр выражается следующим образом:  (5) (5)ςiM- статистическая чувствительность механотронного преобразователя по току к измеряемой механической величине M. Используя формулы (3) – (5) легко найти следующее выражение для рабочей чувствительности по напряжению (ψU.раб) механотрона включенного по схеме рис. 2.  (6) (6) (7) (7)Поскольку обычно RA>> Rn+ RU , то формулы (5) и (7) можно переписать в более простом виде:  (8) (8) (9) (9)Такие простейшие схемы с механотронами на практике встречаются сравнительно редко. Значительно чаще применяются мостовые симметричные схемы на основе сдвоенный механотронов, позволяющих снизить влияние флуктуации источников питания и внутриламповых процессов на выходной сигнал преобразователя рис.3. Рабочая чувствительность по току симметричных диодных механотронов с двумя подвижными анодами, включенных в мостовую схему, определяется как производная от тока в цепи отсчетного прибора по измеряемой механической величине М и выражается следующим соотношением:  (10) (10)Формула получена при условии работы схемы в области, близкой к равновесию моста и обеспечивает достаточную точность при расчете рабочей чувствительности по току для относительно малых перемещений подвижных электродов механотрона. Кроме того, при выводе этих формул внутреннее сопротивление источника питания RU принималось равным нулю, что являются допустимым, поскольку в большинстве практических случаев это сопротивление весьма мало по сравнению с входным сопротивлением моста, определяемым относительно точек 3 и 4 схемы рис.3.  3 4 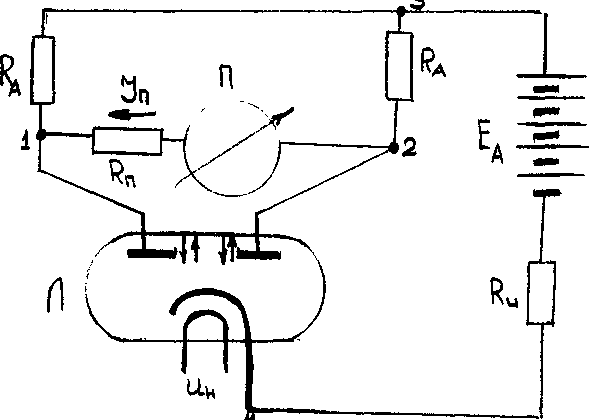 Рис.3. Измерительная схема с двуханодным диодным механотроном. Выходное сопротивление мостовой схемы, определяемое относительно зажимов 1 – 2, равно:  (11) (11)Шкалы выходных отсчетных приборов в схемах градуируют непосредственно в единицах измеряемой механической величины. Цена деления шкалы механотронного устройства νуст. может быть определена как отношение цены деления νп. выходного отсчетного прибора к рабочей чувствительности по току ψi.мост.  (12) (12)Рабочая выходная характеристика механотрона представляет собой зависимость тока In в цепи выходного отсчетного прибора от измеряемой механической величины М : In = f(M). Ценным качеством любого электрического преобразователя механической величины является линейность его рабочей (выходной) характеристики. Рабочая характеристика механотрона In = f(M) общем случае нелинейна, причем ее нелинейность зависит как от нелинейности соответствующих характеристик электродной и кинематической систем механотрона, так и от параметров измерительной схемы. В результате широкого исследования диодных механотронов продольного управления было установлено, что нелинейность указанных характеристик зависит от отношения анодной нагрузки RA к внутреннему сопротивлению механотрона Ri . При некотором оптимальном значении сопротивления RA рабочие характеристики диодного механотрона продольного управления становятся линейными с высокой точностю в широком диапазоне перемещений подвижных электродов. Для простейшей схемы оптимальное значение RA определяется соотношением:  (13) (13)где Rio - внутреннее сопротивление диода в рабочей точке. Для мостовой симметричной схемы значение RA.опт. связано с Rio следующим образом:  (14) (14)ОБОРУДОВАНИЕ И МЕТОДИКА ИЗМЕРЕНИЙ. Конструктивные особенности установки. Экспериментальная установка для измерения перемещений с помощью электронно-механического преобразователя изображена на рис.4. Конструктивные особенности этой установки заключаются в следующем: на основании 1 крепится неподвижная стойка 2, на которой находится зажатая с одного конца стальная пластина 3. Зажимается она при помощи двух угольников. 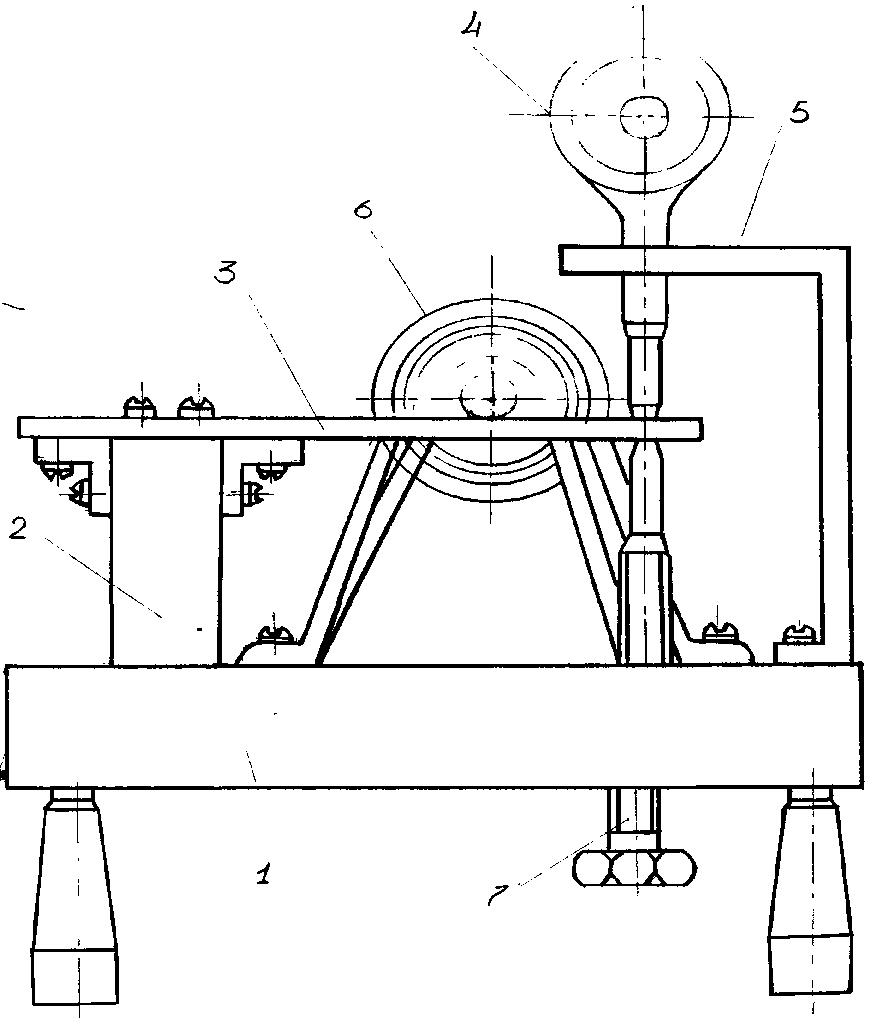 Рис.4. Принципиальная схема экспериментальной установки для исследования характеристик механотронного датчика перемещений. Со свободным концом стальной пластины 3 соединен индикатор 4, служащий для контролирования нужных перемещений, он укреплен на стойке 5. С этим же концом пластины соединен механотронный датчик перемещений 6. Датчик крепится металлическими хомутами на 2-х стойках таким образом, чтобы штырь механотронного преобразователя лежал на пластине. Перемещается свободный конец пластины с помощью регулировочного винта 7. Механотронный датчик перемещений изображен на рис.5. Он представляет собой механотронный преобразователь 1 с крепежным кольцом 2 и измерительным наконечником 3, укрепленный в металлический цилиндрический кожух 4. 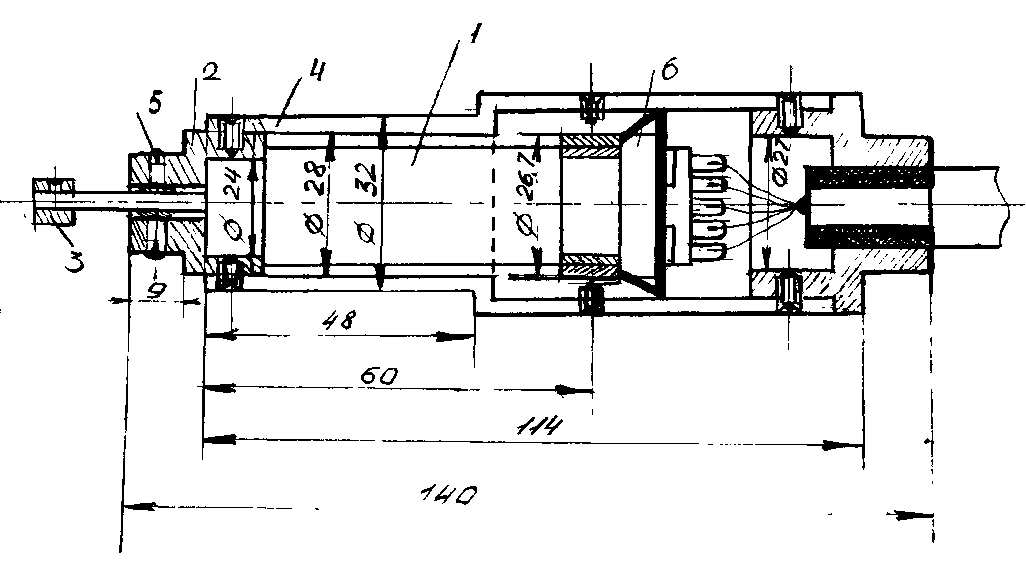 Рис.5. Конструкция механотронного датчика перемещений. 1 – механотронный преобразователь; 2 – крепежное кольцо; 3 - измерительный наконечник; 4 – цилиндрический кожух; 5 – ограничитель хода измерительного наконечника; 6 – стандартная панель для лампы. В датчике предусмотрены ограничители хода измерительного наконечника механотрона, выполненного в виде винтов 5. Соединение механотрона с электрической схемой осуществляется посредством стандартной панели 7. В приборе применен электронно-механический преобразователь типа 6MXIC, включенный в мостовую измерительную, причем ток в диагонали моста измеряется микроамперметром, шкала которого проградуирована в микронах перемещения измерительного наконечника. Механотрон питается от стабилизированного источника питания. Пределы измерения механотронного датчика +1 мм. Измерительное усилие наконечника - не более 20 гс. Электрическая измерительная схема установки.Электрическая схема установки (рис.6.) состоит из блока питания и мостовой симметричной схемы на основе сдвоенного механотрона. В блок питания входят: выходной трансформатор TPI, диодный мост, состоящий их 4-х диодов Д-237, двух электролитических конденсаторов емкостью 30 мкФ∙300B (C1 = C2 = 30∙300B) и одного конденсатора емкостью 100мкФ∙100В (С3 = 100∙100В), резистора R5 = 3000 Ом трех последовательно подключенных стабилитронов и переменного резистора R4 = 220 Ом. Параллельно с переменным резистором включен вольтметр. Диодный мост служит для выпрямления переменного тока, который подается через выходной трансформатор TPI. Электролитические конденсаторы C1, C2 и С3 служат для фильтрации выпрямленного тока. Резистор R5 включен параллельно конденсаторам С1 и С2 . С его помощью достигается падение напряжения с 180 до 14 В. Включенный в схему стабилитрон служит да стабилизирования напряжения и поддерживания его в пределах 14 вольт. При помощи переменного резистора R4 можно изменять напряжение источника питания от 14 B до нуля. Вольтметр служит для контролирования напряжения, поступающего от источника питания в мостовую измерительную схему. Мостовая измерительная схема с двуханодным диодным механотро-ном состоит из механотрона Л, анодной нагрузки R1 и R2, отсчетного прибора П с подключенным к нему через выключатель внешнего сопротивления R3. Питание схемы осуществляется от стабилизированного источника питания, в мостовой измерительной схеме применен механотрон типа 6MXIC. 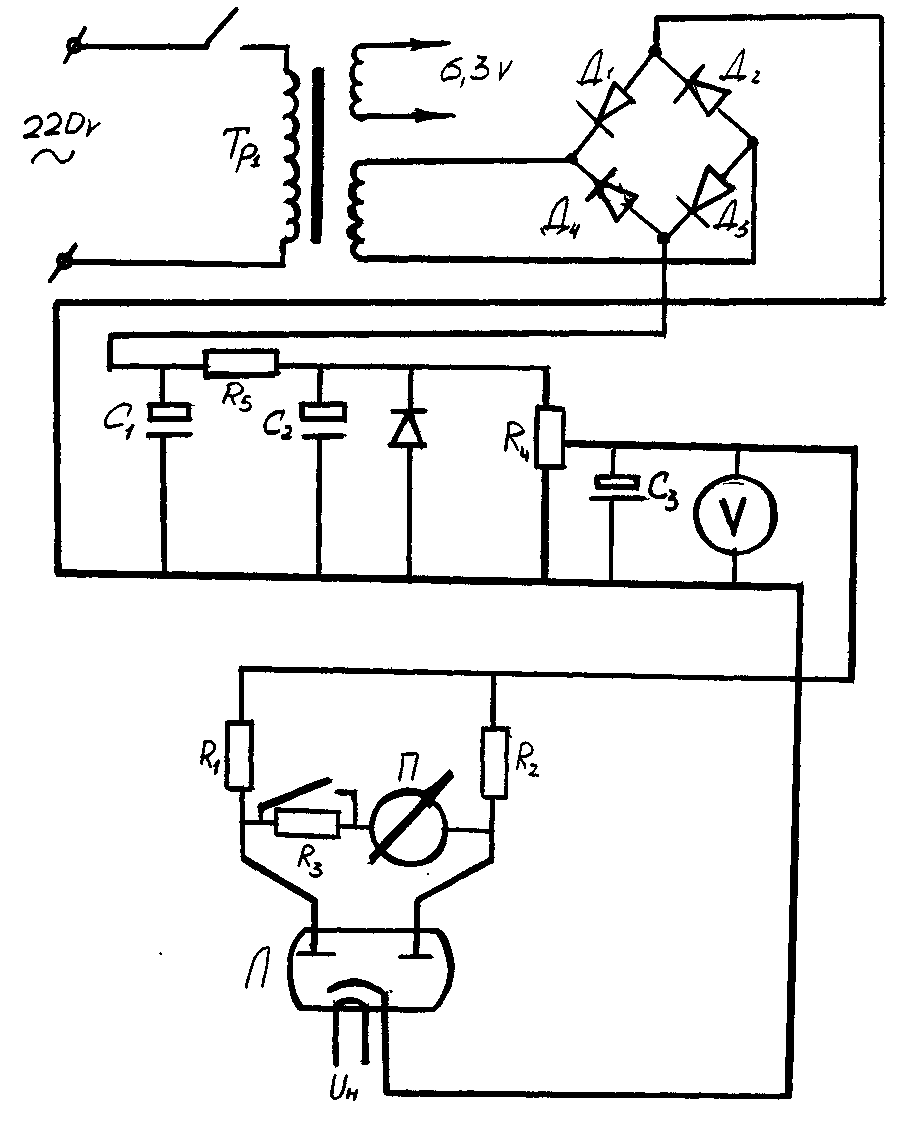 Рис.6. Измерительная схема установки с блоком питания. Сопротивления на анодную нагрузку подбираются с таким расчетом, чтобы рабочие характеристики механотрона были линейными с высокой точностью в широком диапазоне перемещений. Используя формулу (14) производим расчет анодной нагрузки. Из документации на механотрон знаем, что внутреннее сопротивление каждой анодной половины равно 2 кОм. Подставляя это значение в выражение (14) получаем RA опт. = (2 – 3,5)∙2 = 3 кОм, т.е. R1 = R2 = 3 кОм. Отсчетным прибором является гальванометр типа М-906. Внешнее сопротивление R3 = 68 Ом подключенное к отсчетному прибору служит для шунтирования прибора при измерении перемещений. Так как механотрон обладает высокой чувствительностью, то при относительно больших перемещениях (около 100 мкм) происходит зашкаливание стрелки прибора. Чтобы иметь возможность измерять такие перемещения и нужно сопротивление R3. Экспериментальная часть. ЗАВИСИМОСТЬ ВЫХОДНЫХ ХАРАКТЕРИСТИК МЕХАНОТРОННОГО ПРЕОБРАЗОВАТЕЛЯ ОТ ВЕЛИЧИНЫ ПЕРЕМЕЩЕНИЙ. 1. Зависимость анодного тока от величины перемещенийНаиболее важной для механотрона является характеристика перемещения - зависимость анодного тока от расстояния между анодом и катодом, полученная для постоянного напряжения: Для получения этих характеристик используем перемещения от 0 до 100 мкм. Этот интервал перемещений исследуем для каждого из напряжений от 1 до 14 В. Результаты измерений используются для построения графиков .2. Влияние напряжения питания на чувствительность механотронного преобразователя. Для того, чтобы иметь возможность измерять перемещения в 1 мкм, 2 мкм, и т.д., очень важно знать чувствительность механотронного преобразователя и что на нее влияет. При исследовании графических зависимостей чувствительности механотрона от напряжения питания видно, что увеличение напряжения питания повышает чувствительность преобразователя. Порядок выполнения работы. Включить установку в сеть и дать прогреться механотронной лампе в течение 5 минут. Установить анодное напряжение согласно таблице №1. Вращая винт 7, изменять показания индикатора 4 в пределах не более 1 мм, фиксируя показания прибора П (рис.6). Занести данные в таблицу №1. Изменяя анодное напряжение фиксировать показания прибора П (рис.6). По данным таблиц №1 построить соответствующие графики зависимостей. По экспериментальным данным рассчитать чувствительность ψ механотрона для всех величин анодного напряжения. Таблица №1
По данным таблицы построить графики зависимости IA =f (Δ), для каждого напряжения U ( 3, 6, 9, 12В) 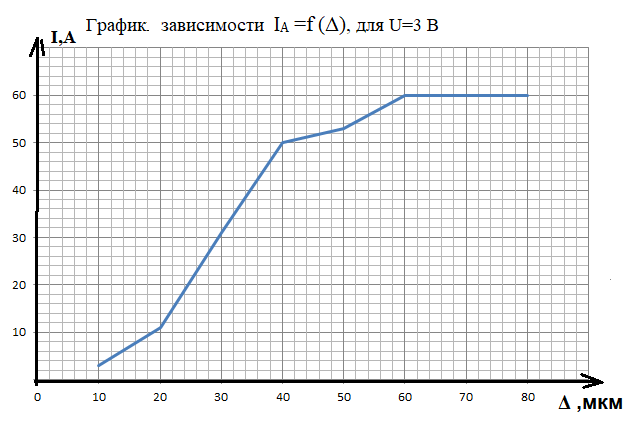 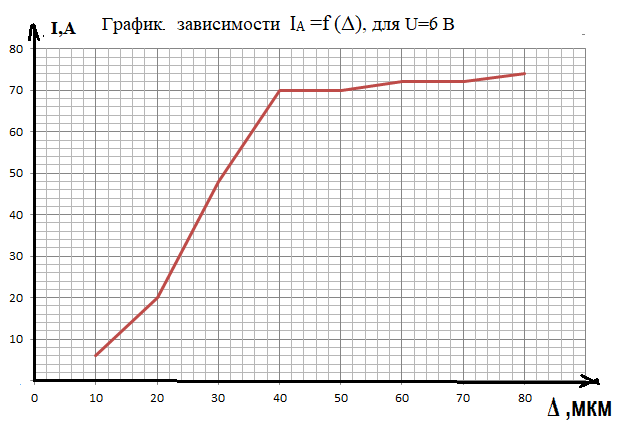 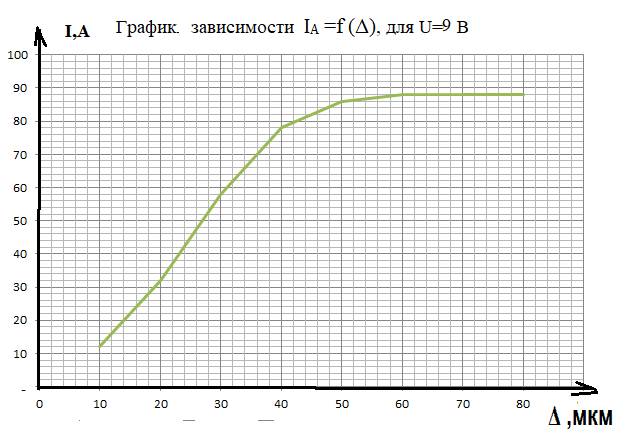 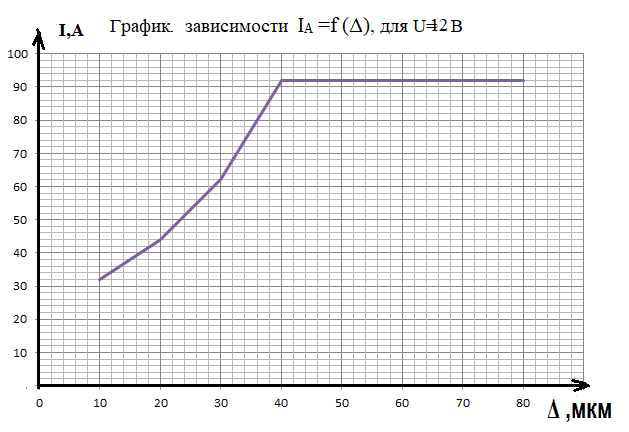 Вывод: Мы познакомились с принципом действия мехатронного датчика перемещений, на основе экспериментальных данных построили графики зависимости анодного тока от расстояния между анодом и катодом, полученные для постоянного напряжения:  |