сборник. Ledpixel Связанные знания Светодиодный модуль Freenove 8 rgb
 Скачать 5.77 Mb. Скачать 5.77 Mb.
|

ЭскизControl_Relay Теперь напишите код для определения состояния кнопочного переключателя. Каждый раз, когда вы нажимаете кнопку, состояние переключения реле будет меняться.  В этом коде мы использовали новый метод для определения состояния кнопки. В функции loop() состояние уровня вывода кнопки определяется постоянно. При изменении уровня запишите момент времени. Если через некоторое время уровень не изменился, будет считаться, что область отскока уже пропущена. Затем оцените, нажата ли кнопка или отпущена, в зависимости от состояния контакта кнопки. Сначала определите две переменные для записи состояния кнопки и реле.  Определите переменную для записи состояния вывода кнопки при последнем обнаружении.  Определите переменную для записи времени последней смены вывода кнопки.  В функции loop() обнаруженное состояние контакта кнопки будет сравниваться с последним обнаруженным состоянием. Если он изменится, запишите этот момент времени.  Если уровень остается неизменным в течение определенного периода времени, считается, что область отскока уже пропущена.  После того, как состояние вывода станет стабильным, изменение состояния кнопки будет подтверждено, после чего оно будет записано для следующего сравнения.  Судите, была ли кнопка нажата или отпущена, в соответствии с уровнем контакта кнопки, выводом информации о кнопке в последовательный порт и реверсивным реле при нажатии кнопки.  Этот метод обнаружения кнопки не ставит программу в состояние ожидания задержки, вы можете повысить эффективность выполнения кода.
Проверьте и загрузите код, каждый раз, когда вы нажимаете кнопку, состояние реле изменяется один раз. Глава 10 Двигатель Теперь мы будем использовать специальный чип DRV8837 для управления двигателем. Список компонентов
Знание компонентов Двигатель постоянного тока Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Двигатели постоянного тока состоят из двух основных частей: статора и ротора. Неподвижной частью двигателя постоянного тока является статор, а вращающейся частью — ротор. Статор обычно является частью внешнего корпуса двигателя (если это просто пара постоянных магнитов) и имеет клеммы для подключения к источнику питания, если он состоит из катушек электромагнита. В большинстве двигателей постоянного тока для хобби используются только постоянные магниты для поля статора. Ротор обычно представляет собой вал двигателя с 3 или более электромагнитами, подключенными к коммутатору, где щетки (через клеммы 1 и 2 ниже) подают электроэнергию, которая может приводить в действие другие механические устройства. На приведенной ниже схеме показан небольшой двигатель постоянного тока с двумя клеммами. 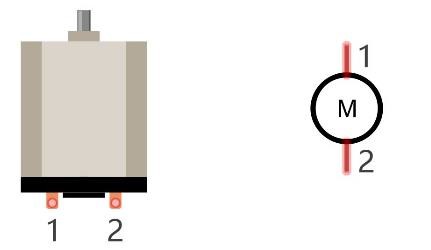 Когда двигатель постоянного тока подключен к источнику питания, он будет вращаться в одном направлении. Если вы поменяете полярность источника питания, двигатель постоянного тока будет вращаться в противоположном направлении. Это важно отметить.   ДРВ8837 + - - +  DRV8837 представляет собой двухканальную микросхему с моторным приводом. Вы можете использовать его для управления однонаправленным двигателем постоянного тока с 2 портами или двунаправленным двигателем постоянного тока с 1 портом. DRV8837 представляет собой двухканальную микросхему с моторным приводом. Вы можете использовать его для управления однонаправленным двигателем постоянного тока с 2 портами или двунаправленным двигателем постоянного тока с 1 портом.Описание порта модуля DRV8837 выглядит следующим образом:
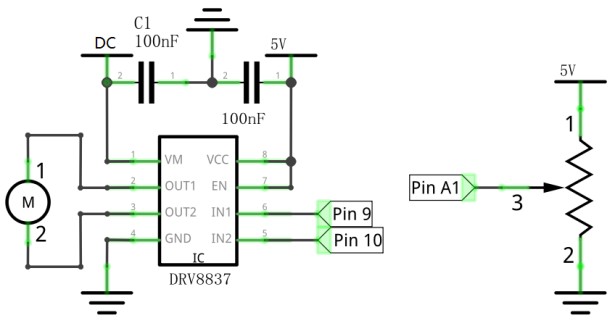
Для получения более подробной информации см. техническое описание. При использовании DRV8837 для управления двигателем постоянного тока обычно используются два типа подключения. В следующем варианте подключения используется один канал DRV8837, который может управлять скоростью двигателя с помощью ШИМ, однако в этом случае двигатель может вращаться только в одном направлении. 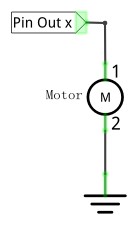 Следующее соединение использует два канала DRV8837: один канал выводит волну ШИМ, а другой канал подключается к GND. Таким образом, вы можете контролировать скорость двигателя. Когда эти два канала обмениваются сигналами, не только контролируется скорость двигателя, но также может контролироваться направление вращения двигателя. 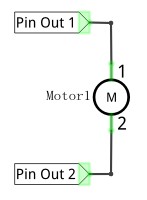 ШИМ ЗАЗЕМЛЕНИЕ ШИМ ЗАЗЕМЛЕНИЕ  ЗАЗЕМЛЕНИЕ ШИМ  Схема Используйте контакт A1 платы управления для определения напряжения поворотного потенциометра; контакт 9 и контакт 10 для управления направлением и скоростью вращения двигателя.
| |||||||||||||||||||||||||||||||||||||||||