Лекции для самоподготовки. Лекционный материал для самостоятельной подготовки заочного этапа по программе повышения квалификации Эксплуатация и ремонт электропривода, электрических сетей и электрооборудования объектов газораспределительных сетей
 Скачать 25.37 Mb. Скачать 25.37 Mb.
|

|
Раздел 2, Высоковольтное электрооборудование и молниезашита подстанций Лектор доц. Лопатин В.П 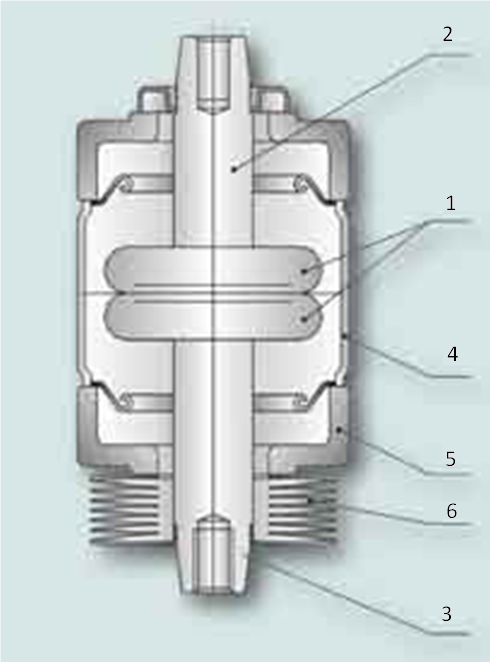 Рис. 1. Вакуумная дугогасительная камера в разрезе: 1. – контакты; 2. – токоведущий штырь неподвижного контакта; 3. – токоведущий штырь подвижного контакта; 4. – металлический экран; 5. – керамический изолятор; 6. – сварной сильфон. 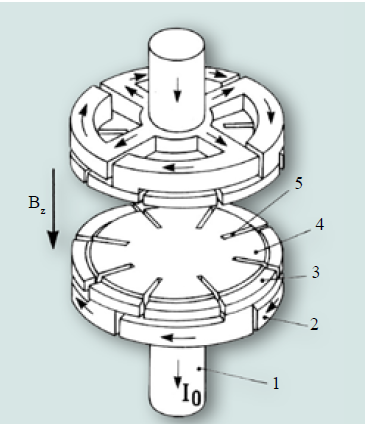 Рис. 2. Один из первых вариантов конструкции КС, генерирующей аксиальное магнитное поле при протекании через неё тока. Стрелочками указан путь тока в металле. 1. – токоведущий штырь; 2. – катушка, генерирующая магнитное поле; 3. – электрод; 4. – контактная накладка; 5. – разрез накладки  Рис. 3 Внешний вид вакуумного выключателя серии BB/TEL 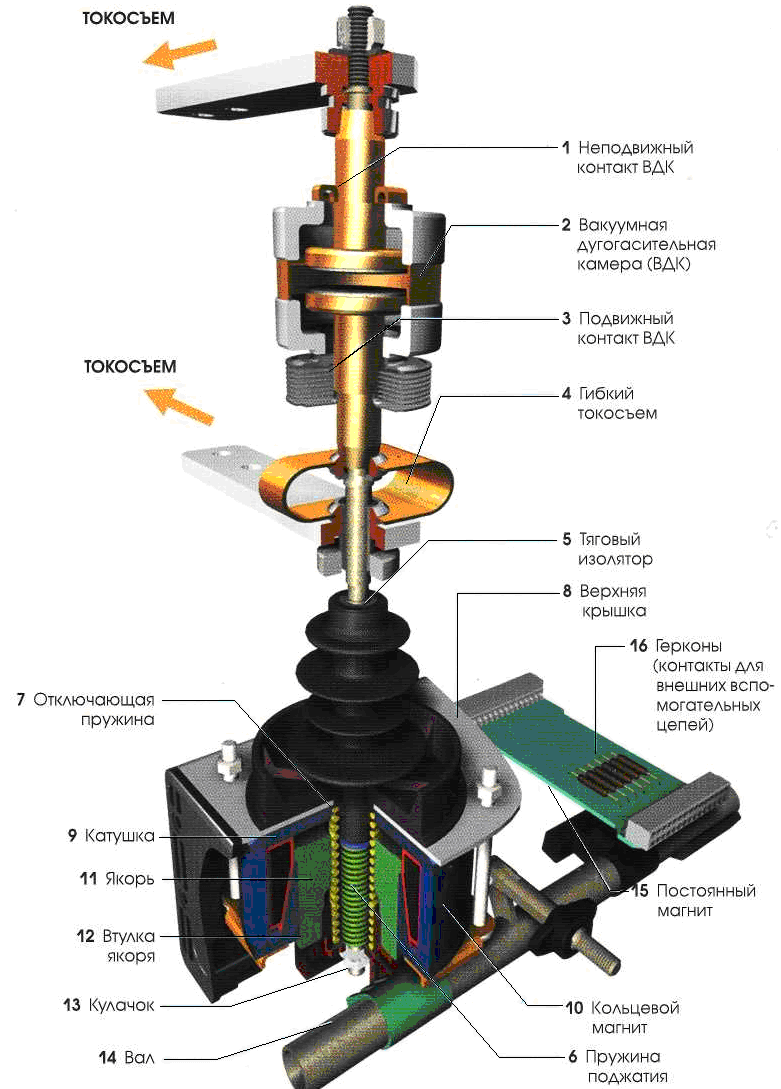 Рис. 4 Конструкция выключателя серии BB/TEL 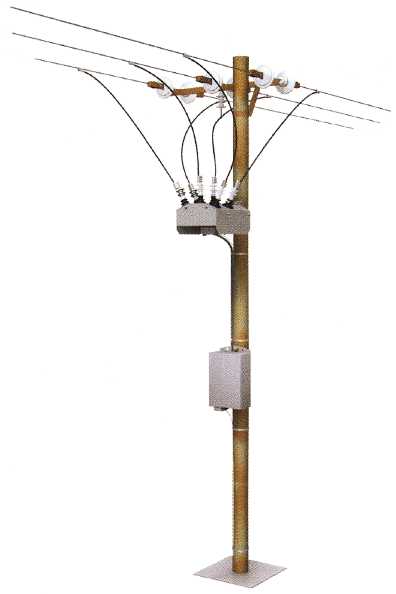 Рис. 5 - Реклоузер вакуумный PBA/TEL 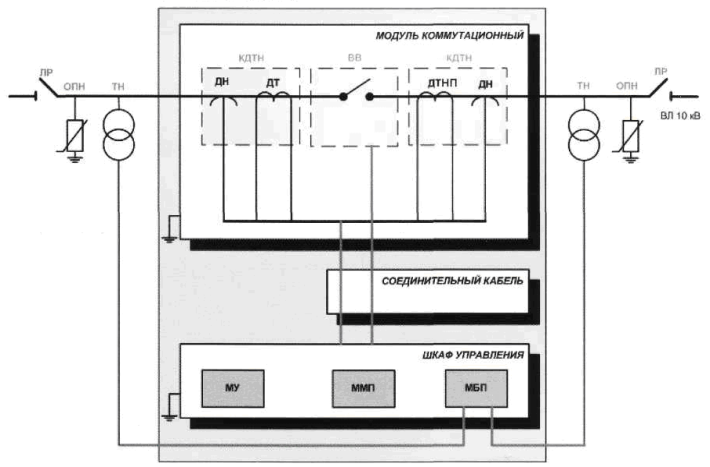 Рис. 6 Принципиальная электрическая схема включения PBA/TEL в ЛЭП ДН - датчик напряжения; ДТ - датчик тока; ДТНП - датчик тока нулевой последовательности; КДТН – комбинированный датчик тока и напряжения; ВВ - вакуумный выключатель; МУ - модуль управления; ММП - модуль микропроцессора; МБП - модуль бесперебойного питания; ОПН - ограничитель перенапряжения; ТН - трансформатор напряжения; ЛР - линейный разъединитель; ВЛ - воздушная линия. 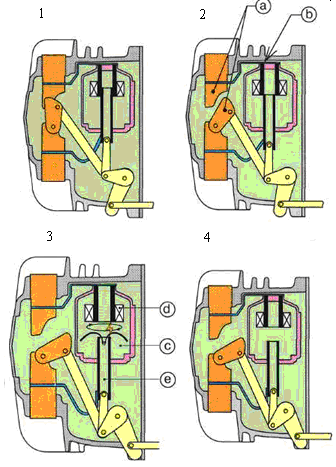 Рис. 7 Этапы гашения дуги в элегазовом выключателе 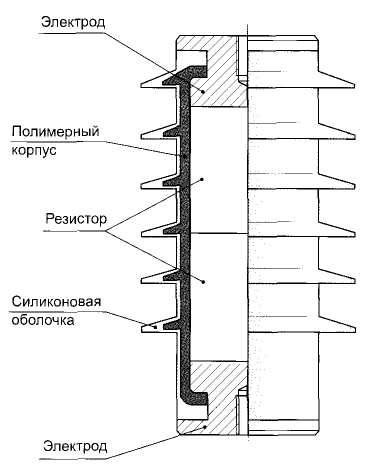 Рис. 8 Конструкция ограничителя нелинейного ОПН/TEL-6, 10 Длинно-искровые разрядники для грозозащиты ВЛ 6, 10 кВ  Рис. 9 Общий вид петлевого разрядника на опоре ВЛ а – конструктивный эскиз; б – фотография испытаний на макете Молниезащита  Рис.10 Зона защиты одиночного стержневого молниеотвода  Рис.11 Зона защиты одиночного тросового молниеотвода  Рис.12 Зона защиты двойного стержневого молниеотвода Раздел 3 Электрические машины Лектор Юсупов Р.З. 1. АСИНХРОННЫЕ ДВИГАТЕЛИ 1.1. Устройство Асинхронные машины (АМ), как и другие электрические машины, обратимы и могут работать в качестве как двигателя, так и генератора. Как правило, асинхронные машины используются в качестве двигателей (асинхронные двигатели - АД). Конструктивное устройство асинхронной машины показано на рисунке 1. 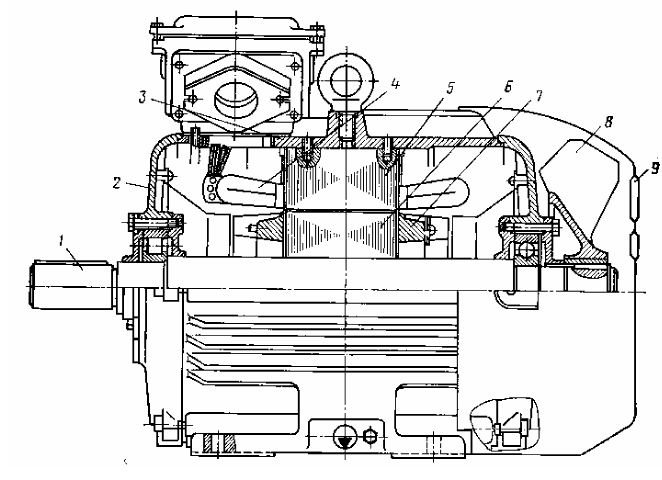 1-вал; 2-подшипниковый щит; 3-корпус статора; 4-обмотка статора; 5-сердечник статора; 6-сердечник ротора; 7-обмотка ротора (короткозамкнутая);8-вентилятор; 9-кожух вентилятора Рисунок 1 - Асинхронный двигатель с короткозамкнутым ротором Неподвижная часть машины называется статором, подвижная часть - ротором. Сердечники статора и ротора асинхронных машин собираются (шихтуются) из отдельных листов электротехнической стали (рисунок 2). 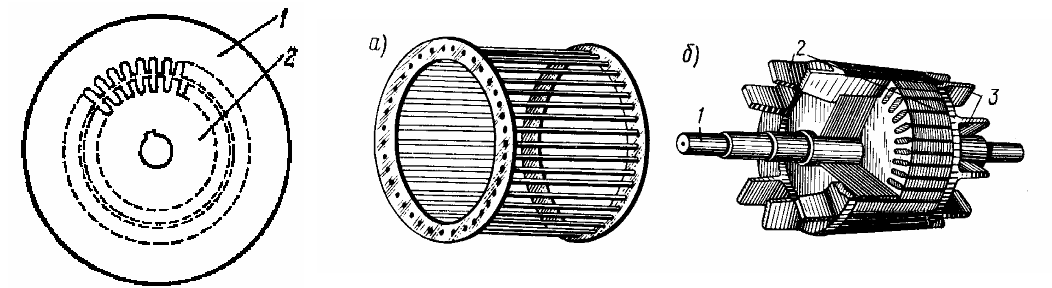 1 – статор, 2 - ротор Рисунок 2 Рисунок 3 На внутренней поверхности статора и на внешней поверхности ротора имеются пазы, в которых размещаются проводники обмоток. Обмотка статора выполняется трехфазной, подсоединяется к сети трехфазного тока и называется первичной обмоткой. К конструктивным частям статора относятся: станина, в которую устанавливается магнитопровод, и подшипниковые щиты, служащие для поддерживания вала. Воздушный зазор между статором и ротором в асинхронных машинах выполняется минимально возможным по условиям производства и надежности работы. В машинах мощностью в несколько киловатт величина зазора составляет около 0,5 мм, с ростом мощности и габаритов машины величина зазора увеличивается. Обмотка ротора может быть выполнена трехфазной аналогично обмотке статора. Концы фаз такой обмотки ротора соединяются обычно в «звезду», а начала с помощью контактных колец и металлографитных щеток выводятся наружу. Такая асинхронная машина называется машиной с фазным ротором. К контактным кольцам обычно присоединя- ется трехфазный пусковой или регулировочный реостат. Фазная обмотка ротора выполняется с тем же числом полюсов, как и статорная обмотка. Другая разновидность обмотки ротора - обмотка в виде беличьей клетки (рис.3). Концы стержней такой обмотки с обоих торцов соединены накоротко кольцами, поэтому обмотка выводов не имеет. Такая асинхронная машина называется машиной с короткозамкнутым (к.з.) ротором. В машинах мощностью до 100 кВт обмотка ротора выполняется путем заливки алюминием. В более крупных машинах применяется медная сварная обмотка. Отсутствие скользящего контакта на роторе обеспечивает высокую надежность работы такого двигателя, а простота технологии изготовления - дешевизну. По этим причинам асинхронные двигатели с к.з. ротором находят широкое применение и составляют основной парк электрических машин. Следует отметить, что обе эти конструкции трехфазного асинхронного двигателя были изобретены М.О. Доливо-Добровольским в 1891 г. и сохранили по существу предложенный им вид. 1.2 Работа асинхронной машины Работа асинхронной машины (АМ) основана на взаимодействии вращающегося магнитного поля статора с индуктированными в к.з. обмотке ротора токами. Наибольшее распространение получили асинхронные двигатели (АД). При питании обмотки статора асинхронного двигателя трехфазным током создается вращающееся магнитное поле. Поэтому в АД отсутствует обмотка возбуждения, а на роторе расположена m-фазная к.з. обмотка. Частота n1 вращения магнитного поля статора АД определяется тем, что вращающееся магнитное поле создается при питании обмотки статора, имеющей p пар полюсов, трехфазным током частотой f1. Следовательно, синхронная частота no=n1=60f1/p. Симметричная система токов обмотки статора (рисунок 4) определяет возникновение кругового поля, обеспечивающего наибольший вращающий момент. 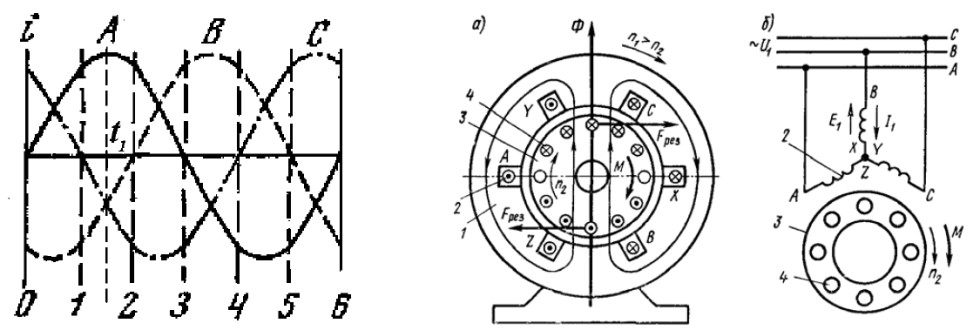 Рисунок 4 Вращающийся магнитный поток Ф1 индуктирует ЭДС в обмотке ротора. Поскольку обмотка ротора замкнута, то возникает система токов ротора I2 и создается вращающийся поток ротора Ф2. Поток ротора вращается относительно статора в ту же сторону и с той частотой n1 , что и поток статора Ф1 и имеет то же количество полюсов, но ориентирован, согласно правилу Ленца, практически ему навстречу. В результате взаимодействия неподвижных друг относительно друга потоков статора и ротора образуется результирующий поток Ф. Взаимодействие потока Ф и тока ротора приводит к возникновению электромагнитных сил и электромагнитного момента. В режиме двигателя под действием этого момента ротор вращается в сторону вращения магнитного поля. В режиме генератора ротор вращается с помощью приводного двигателя со скоростью n > n1 , при этом ЭДС обмотки статора превышает напряжение сети, и машина отдает энергию в сеть. Частота вращения n ротора асинхронной машины всегда отлична от частоты вращения магнитного поля n1, которую называют синхронной. Отсюда происходит название машины - асинхронная, т.е. несинхронная, в которой n ≠ n1. В противном случае проводники ротора не будут пересекаться магнитными линиями вращающегося поля, в них не будет индуктироваться ЭДС, не будет возникать тока ротора и момента. Отличие частоты вращения ротора n и магнитного поля n1 характеризуется скольжением s=(n1-n)/n1. Скольжение может выражаться в относительных единицах или процентах. Электромагнитный момент АД (упрощенная формула):
где U1 – напряжение статора; R2 – активное сопротивление обмотки ротора; S – скольжение; X2 – индуктивное сопротивление ротора, С - конструктивный коэффициент. Из полученного выражения для электромагнитного момента следует, что он сильно зависит от подведенного напряжения (M∼U12). При снижении, например, напряжения на 10%, электромагнитный момент снизится на 19% (M∼(0,9U1)2=0.81U12). Это является одним из недостатков асинхронных двигателей, так как приводит на производстве к снижению производительности. ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ Механическая характеристика. Механической характеристикой на зывается зависимость частоты вращения двигателя от вращающего момента n2 = f(M) при U1 = const. 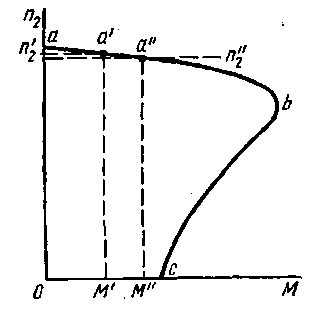 2 = f ( M ) n 2 = f ( M ) 2 = ( 1 – s ) 1 n 2 = ( 1 – s ) n 1 Рабочие характеристики. Изменение различных электрических и механических параметров двигателя в нормальном режиме описывается рабочими характеристиками, под которыми понимают зависимости n2, s ,M2, I1 , cos  , ,  от мощности P2 валу двигателя при U1 = const и f = const . от мощности P2 валу двигателя при U1 = const и f = const .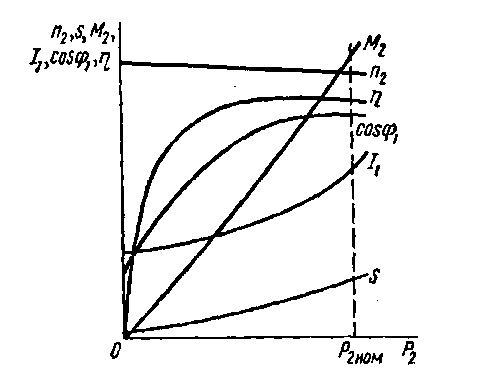 2. УСТРОЙСТВА ПЛАВНОГО ПУСКА ЭЛЕКТРОДВИГАТЕЛЕЙ Эффективное использование устройств плавного пуска (УПП) возможно только при условии корректного выбора типономинала. Ключевыми критериями выбора обычно являются тип нагрузки двигателя, частота пусков, а также паспортные данные. Пусковые характеристики устройств могут значительно отличаться друг от друга, причём их величины зависят от спектра решаемых задач. Именно поэтому при выборе устройства плавного пуска асинхронных двигателей так важно учитывать область его будущего применения. Характеристики пуска условно можно разделить на три категории. Режимы работы УПП - Нормальный режим ограничивается величиной пусковых токов на уровне 3,5 х I ном, при времени пуска от 10 до 20 секунд. - Тяжёлый режим характеризуется нагрузками с несколько большим моментом инерции. Пусковые токи ограничены пределом 4,5 х I ном, а время разгона — 30-ю секундами. - Очень тяжелый режим подразумевает наличие очень высоких моментов инерции. Пусковые токи доходят до уровня 5,5 х I ном, а время разгона может значительно превышать 30 секунд. Виды УПП Рассмотрим основные категории устройств плавного пуска. Схема работы УПП может быть одной из четырёх типов: 1. Регуляторы пускового момента контролируют лишь одну фазу трехфазного асинхронного двигателя. Хотя такой тип управления и способен контролировать плавный пуск, он не обеспечивает снижения пусковых токов. Фактически, при использовании регуляторов пускового момента, ток на обмотках двигателя приблизительно равен току, который получается при прямом пуске. В тоже время, такой ток протекает по обмоткам дольше, чем в случае прямого пуска, поэтому двигатель может перегреться. Устройства такого типа не могут применяться для приводов, которым нужно снижение пусковых токов. Они не могут обеспечить пуск высокоинерционных механизмов (из-за опасности перегрева двигателя), а также частые запуски/остановки привода. 2. Регуляторы напряжения без сигнала обратной связи могут работать только по жестко заданной пользователем программе. Обратная связь от двигателя отсутствует, поэтому они не могут изменять частоту вращения двигателя, подстраивая её под меняющуюся нагрузку. В остальном они отвечают всем требованиям, которые предъявляются к мягким пускателям, и способны управлять всеми фазами двигателя. Это едва ли не самые популярные устройства плавного пуска. Таблица 1 Режим работы в зависимости от области применения 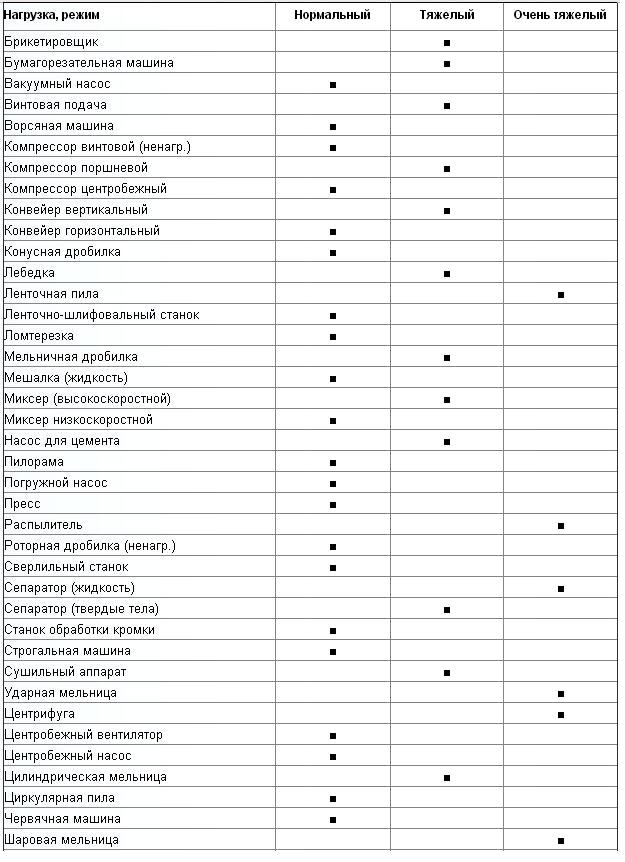 Схема запуска двигателя определяется путём предварительного задания стартового напряжения, а также времени, необходимого для пуска. Многие устройства такого типа могут обеспечивать также ограничение величины пускового тока — это достигается снижением напряжения при запуске. Разумеется, такие регуляторы способны управлять также замедлением работы механизма, выполняя плавный и продолжительный останов. Двухфазные регуляторы могут снижать напряжение и в трёх фазах, однако ток получается несбалансированным. 3. Регуляторы напряжения с сигналом обратной связи — это модернизированные версии устройств, описанных выше. Они способны считывать текущую величину тока и регулировать напряжение таким образом, чтобы ток не выходил за заданные пользователем рамки. Также полученные данные используются для работы разнообразных защит (от дисбаланса фаз, перегрузки и т.п.). Такое устройство плавного пуска асинхронных двигателей может быть сгруппировано с другими подобными устройствами в единую систему управления электродвигателями. 4. Регуляторы тока с сигналом обратной связи. Это самые современные устройства плавного пуска. Схема работы основана на регуляции силы тока, а не напряжения, как предыдущие модели. Это обеспечивает лучшую точность управления, более простое программирование и быструю настройку устройства — ведь большинство параметров тут определяется автоматически, без необходимости ручного ввода. Запуск на пониженное напряжение В момент такого пуска ток, протекающий через двигатель, равен току в случае заклиненного ротора. Двигатель в это время разгоняется, причём момент в какое-то мгновение становится выше номинала, после чего приходит к номинальному значению. Характер изменения тока и момента зависит от конструкции и модели каждого конкретного двигателя. Следует заметить, что процесс запуска двигателей разных моделей, но имеющих одинаковые характеристики, может сильно отличаться. Пусковой ток может находиться в пределах 500%—700% от номинального, а момент — от 70% до 230%! Такие особенности являются серьёзным препятствием для работы этого вида устройств плавного пуска асинхронных двигателей. Поэтому если ваша задача — получить высокий пусковой момент при минимальном значении пускового тока, вам нужно подбирать соответствующие двигатели. Пусковой момент двигателя имеет квадратичную зависимость от силы тока, как уже было показано. Необходимо помнить, что снижение тока должно быть ограниченным: если пусковой момент станет меньше момента нагрузки, разгон прекратится, и двигатель не наберет номинальную скорость вращения. Пускатели по схемам треугольник/звезда Хотя пускатели такого типа являются самым распространённым видом устройств плавного пуска, схема треугольник/звезда не позволяет работать при больших нагрузках. Сначала, при пуске, двигатель подключается «в звезду», а момент и величина тока при этом равна трети от номинальной. По истечению заданного интервала привод отключается и снова включается, но уже по схеме «треугольник». Пуск будет эффективным, если при разгоне по схеме «звезда» двигатель сможет развить момент, который необходим для набора скорости, достаточной для переключения на «треугольник». Если это произойдёт на скорости, значительно меньшей номинальной, то ток при таком пуске не будет значительно отличаться от тока прямого пуска, а значит, применение устройства лишено смысла. Кроме взрывных скачков тока и момента, в момент перехода двигателя на работу по схеме «треугольник» происходят и другие сложные переходные процессы. Их амплитуда зависит от амплитуды и фазы напряжения, которое создаётся двигателем при переключении. В самом худшем случае величина напряжения может быть такой же, как в сети, однако находиться в противофазе. Тогда ток будет превышать номинальный в два раза, а момент, согласно вышеприведенной формуле, в четыре. Пускатели с автотрансформатором В конструкции таких пускателей для снижения подводимого к двигателю напряжения используется автотрансформатор. Для ступенчатой регуляции величины пускового тока и момента используются специальные отводы. Полная скорость вращения вала электродвигателя достигается до момента перехода на номинальное напряжение, а скачки тока при этом минимизируются. В тоже время из-за ступенчатого характера регулирования достичь высоких показателей точности оказывается невозможно. Пускатель с автотрансформатором, в отличие от предыдущего (треугольник/звезда) характеризуется замкнутыми переходными процессами. Это означает, что жесткие переходные процессы кривых момента и тока во время разгона электродвигателя отсутствуют. Из-за падения величины напряжения на автотрансформаторе, уменьшается момент на любых скоростях электродвигателя. При высокоинерционной нагрузке привода время пуска может превысить допустимые (безопасные) пределы, а при переменной — поведение системы становится неоптимальным. Пускатели с автотрансформатором обычно используются при частоте пусков до 3 шт./час. Устройства плавного пуска асинхронных двигателей, рассчитанные на более частые запуски или на более сильную нагрузку, имеют большие габариты и стоят значительно дороже. Пускатели со встроенными в цепь статора резисторами Такие пускатели для снижения подводимого к статору напряжения используют жидкостные или металлические резисторы. При грамотном выборе резисторов такие устройства обеспечивают хорошее снижение момента и пускового тока электродвигателя. Точный выбор резисторов должен быть сделан ещё на этапе проектирования с учётом всех параметров двигателя, его режимов работы и планируемой нагрузки. Однако такая информация не всегда оказывается доступной, а когда резисторы выбирают неточно, то и качество, и надёжность работы пускателя остаются невысокими. Особенность такой схемы заключается в том, что сопротивление резисторов меняется в процессе работы из-за их нагрева. По причине опасности перегрева, пускатели с резисторами не используются для работы с высокоинерционными машинами и механизмами. Устройства плавного пуска асинхронных двигателей УПП (тиристорные УПП) — это наиболее технически совершенные электронные устройства, используемые для плавного пуска/останова электродвигателей. Принцип работы заключается в управлении входящим напряжением. Основная задача — управление пусковым током и моментом, однако современные схемы устройств плавного пуска имеют множество интерфейсных функций, а также позволяют обеспечить комплексную защиту двигателя. Основные функции УПП: — возможность плавно и бесступенчато изменять напряжение и ток; — возможность управления током и моментом путём создания несложных программ; — плавный останов с мягким торможением в тех системах, где это может потребоваться (конвейеры, насосы и т.п.); — обеспечение частых пусков и остановов без изменения характеристик системы; — оптимизация рабочих процессов даже в системах с изменяющейся нагрузкой. Применение УПП позволяет: устранить ударные токи в питающей сети и АД при его пуске; снизить пусковые токи в АД; устранить механические ударные воздействия как на АД, так и на приводной механизм; уменьшить тепловые воздействия на АД; снять перенапряжения при останове АД; сократить время поиска неисправности; повысить надежность эксплуатации и срок службы АД. Устройство плавного пуска представляет из себя тиристорный регулятор напряжения (ТРН) 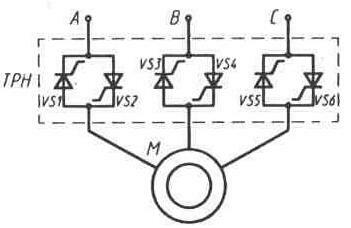 В регуляторе напряжения в каждый фазный провод включаются встречно-параллельно два тиристора, один из которых работает условно в положительный полупериод напряжения сети, а другой в отрицательный. Регулирование напряжения на выходе регулятора осуществляется изменением времени включения каждого тиристора относительно момента, когда ток должен переходить с одного из трех тиристоров на другой (базовая точка), путем подачи на тиристор управляющего импульса, что дает возможность изменять время протекания тока через тиристор в течение полупериода напряжения сети и напряжение на его выходе, подаваемое на нагрузку, в данном случае на двигатель. Это напряжение не является синусоидальным, и его можно представить как среднее напряжение, которое можно менять, изменяя продолжительность работы тиристора в течение полупериода. Время включения тиристора относительно базовой точки выражается в градусах и называется углом регулирования. Изменяя угол регулирования тиристоров, можно получить необходимое напряжение для плавного пуски двигателя. По окончании процесса пуска тиристоры переводятся в режим постоянного включения или могут шунтироваться специальным контактором. Применение шунтирующего контактора позволяет повысить КПД устройства, увеличить срок службы тиристоров и исключить влияние полупроводниковых элементов на сеть. ФУНКЦИИ ЗАЩИТЫ Дополнительно к функциям управления пусковыми режимами и режимами останова, тиристорные преобразовательные устройства (ТПУ) снабжаются функциями защиты АД и защиты ТПУ от аварийных режимов. К стандартным функциям относятся: защита от короткого замыкания на выходе ТПУ; защита от заклинивания вала двигателя при пуске; защита от перегрузки по току в рабочем режиме; защита от недопустимого снижения напряжения на входе ТПУ; защита от недопустимого повышения напряжения на входе ТПУ; защита от обрыва фаз; защита от невключения шунтирующего контактора (при наличии); защита от несимметрии входного напряжения; защита от обратного чередования фаз на входе; тепловая защита двигателя; защита от пробоя силового тиристора; защита при потере управляемости тиристора. Тепловая защита двигателя предполагает наличие встроенного в обмотку двигателя датчика температуры, а в системе управления предусматривается только наличие соответствующего входа и системы обработки. При отсутствии такого датчика осуществляется так называемая косвенная тепловая защита, которая основывается на той или иной тепловой модели двигателя, закладываемой изготовителем в программное обеспечение микроконтроллера. Кроме рассмотренных функций, некоторые изготовители закладывают в ТПУ датчики сопротивления изоляции и возможность сушки обмотки постоянным или переменным током. Система управления Интерфейсная часть системы управления содержит, как правило, две части: интерфейс оператора и интерфейс оборудования. Интерфейс оператора выполняется обычно на основе жидкокристаллического индикатора (ЖКИ) и клавиатуры, расположенных на лицевой панели устройства. С помощью ЖКИ и клавиатуры производится программирование устройства и на ЖКИ выводится информация о режимах работы устройства. Ряд изготовителей недорогих устройств малой мощности реализует интерфейс оператора на основе светодиодной индикации и микропереключателей (устанавливаемых перемычек). Интерфейс оборудования предполагает развитую систему ввода управляющих сигналов и вывода сигналов о состоянии устройства. Так, команды «пуск/стоп» могут приниматься в виде уровней напряжения, унифицированных токовых сигналов или сигналов типа «сухой контакт». Последние модели устройств содержат в своем составе последовательные каналы связи на основе шин RS-232, RS-432, CAN, через которые может производиться как программирование устройства, так и задание команд пуска/останова и считывание информации о режиме работы. Общее количество входных, выходных сигналов может достигать 15–20 каналов. Производители В настоящее время ТПУ выпускают такие мировые производители, как ABB, Siemens, Emotron AB, Softronic, Telemecanique, Ansaldo и ряд других. Выпуск ТПУ освоили и российские фирмы. Большинство фирм выпускает ТПУ в виде моноблока, в котором размещаются силовая часть, система управления и вспомогательные элементы. Следует отметить, что большинство зарубежных устройств не имеют в своем составе шунтирующего контактора, а в системе управления предусматриваются только элементы управления внешним контактором. В качестве примера отечественного ТПУ можно привести ТПУ4К на мощности 55–160 кВт. Оно построено по классической схеме, имеет встроенный шунтирующий контактор и использует в качестве ядра системы управления микроконтроллер производства Atmel. Интерфейс оператора комбинированный, включающий в себя ЖКИ, подключаемую на время ввода параметров клавиатуру и ряд потенциометров, задающих величины токовых уставок для различных режимов работы. ТПУ имеет следующие функции защиты: от установившегося короткого замыкания на выходе ТПУ; от заклинивания вала двигателя при пуске; от перегрузки по току в рабочем режиме; от обрыва фаз; от невключения шунтирующего контактора; тепловая защита двигателя. При срабатывании любой защиты ТПУ отрабатывает процедуру останова двигателя в соответствии с алгоритмом, оптимизированным для конкретного вида привода. ТПУ выполнен инвариантным по отношению к чередованию фаз на входе, поэтому не нуждается в защите от неправильной фазировки питающей сети. Из сервисных функций следует отметить наличие выхода, сигнализирующего о безаварийном окончании процесса пуска. Большое разнообразие пусковых устройств различных производителей, имеющих примерно одинаковые технические характеристики, заставляет обращать внимание на стоимостные, эксплуатационные и «пользовательские» характеристики. Примечателен тот факт, что изделия отечественных производителей существенно дешевле, чем зарубежные. Кроме того, некоторые отечественные производители, в отличие от иностранных, в цену устройства закладывают затраты на ввод в эксплуатацию, адаптацию изделия к конкретному приводу и оптимизацию его характеристик применительно к конкретному механизму. Наличие микроконтроллера позволяет отдельным отечественным производителям оперативно адаптировать алгоритмы и параметры под требования конкретного заказчика и конкретного вида привода, в то время как представители западных компаний таких услуг не предоставляют. Примеры УПП: 1) Устройство плавного пуска SIRIUS 3RW40 со встроенными функциями: - полупроводниковая защита двигателя и собственная защита устройства от перегрузок - регулируемое токоограничение для плавного пуска и остановки трёхфазных асинхронных двигателей • Диапазон номинальной мощности от 75 до 250 кВт (при 400 В) • Области применения: Вентиляторы, насосы, строительное оборудование, прессы, эскалаторы, системы кондиционирования воздуха, системы транспортировки, сборочные линии, компрессоры и  охладители, исполнительные механизмы. 2) Устройство плавного пуска PSS – универсальная серия. Фирма АВВ  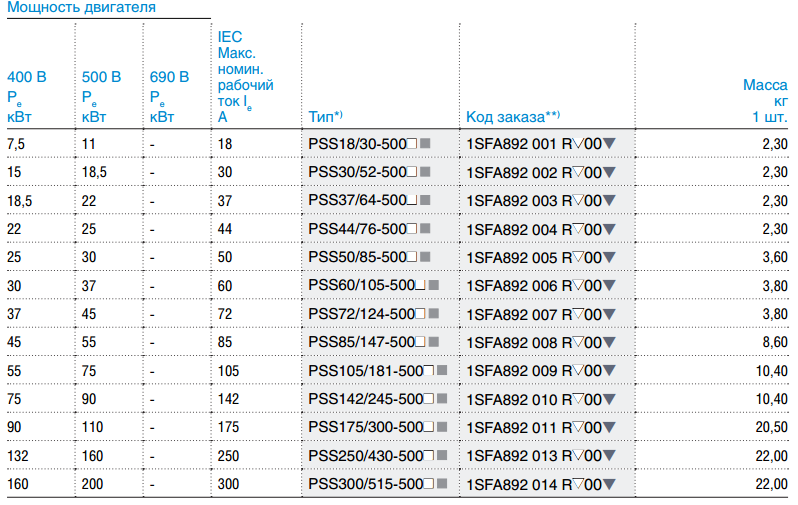 3) Устройства плавного пуска и торможения Altistart 48. Фирма Schneider Electric  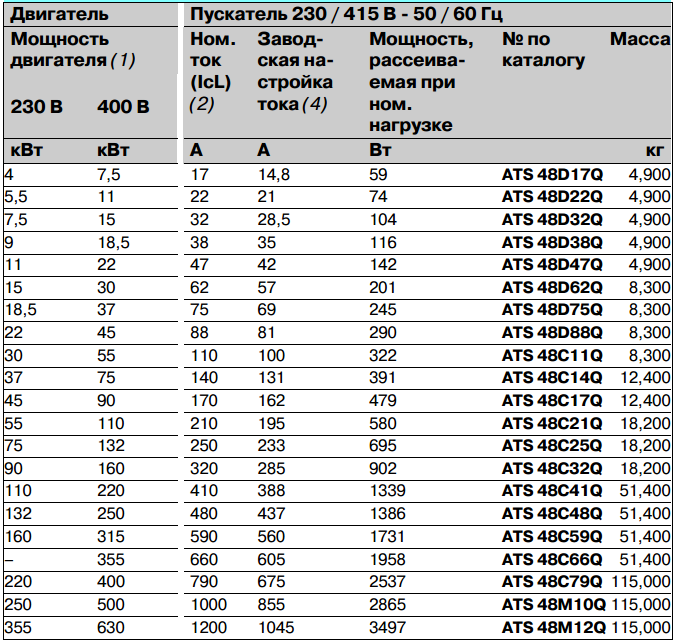 |