Лекция 1 (03. 09. 2014) Предмет изучения Системы автоматического управления (сау) Основные части сау
 Скачать 440.5 Kb. Скачать 440.5 Kb.
|

|
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (ТАУ) Лекция №1 (03.09.2014) Предмет изучения: Системы автоматического управления (САУ) Основные части САУ: Объект управления (ОУ) Регулятор (Р) Объект управления может быть описан математической моделью, которая имеет входы управления (минимум один), входы воздействия внешних факторов, выходные сигналы, которые содержат информацию о состоянии объекта управления (см. рис.1)  Рис.1 Модель объекта управления X1(t), X2(t),… Xm(t) – входное, управляющее воздействие; Y1(t), Y2(t),… Yn(t) – входные сигналы, состояние объекта; E1(t), E2(t),… Ek(t) – воздействие внешних факторов. Регулятор вырабатывает сигналы (команды) управления, с целью поддержания заданного состояния объекта управления. Регулятор создаётся разработчиком системы, исходя из знаний свойств объекта управления и поставленной задачи управления. ПРИНЦИПЫ УПРАВЛЕНИЯ Принцип разомкнутого управления (регулирования) Управление осуществляется по заранее заданному алгоритму без учета текущего состояния объекта управления (см. рис. 2). Условия необходимые для использования данного принципа управления: – достаточно информации о свойствах объекта и неизменности этих свойств или полное отсутствие во времени и пространстве; –  незначительность или полное отсутствие воздействия внешних факторов. незначительность или полное отсутствие воздействия внешних факторов.Рис.2 Модель САУ разомкнутого управления Y*(t) – желаемый алгоритм управления; Принцип компенсации (управление по возмущению) Этот принцип предложил впервые Понселе (1829 г.). Согласно данному принципу вводится второй регулятор, который, используя информацию о, вырабатывает дополнительное регулирующее воздействие для компенсации их воздействия на объект управления (см. рис. 3).  Рис.3 Модель САУ с компенсацией воздействия внешних факторов XE(t) – входное компенсирующее управляющее воздействие; Качество работы этой системы выше, но требует усложнения САУ из-за необходимости введения второго регулятора. Принцип замкнутого управления (управление с обратной связью, управление по отклонению) Предложен Чикалёвым (1874 г.) Это принцип является наиболее общим, но и наиболее сложным и дорогим в использовании. Чаще всего он используется в виде управления по отклонению, то есть с использованием сигнала ошибки e(t) (см. рис. 4).  Рис.4 Модель САУ замкнутого управления (управления по отклонению), где e(t) = Y*(t) – Y(t). Возможны структуры САУ в которых используются комбинации данных принципов управления а так же множество контуров обратной связи. Благодаря своей универсальности методы автоматического управления применимы для систем любой природы: для механических, электротехнических и радиотехнических систем. Они используются при описании и исследовании биологически или экономических систем. Универсальность методов автоматического управления основывается на возможности представления объекта управления в виде математической модели типовой САУ. ПРИМЕРЫ: Рассмотрим простейшие примеры систем автоматического управления скоростью автомобиля. Пусть двигатель автомобиля развивает усилие X(t), тогда автомобиль, при условии отсутствия трения, будет двигаться с ускорением равным a(t) = X(t)/M, где M – масса автомобиля, а его скорость Y(t) можно найти как интеграл от ускорения: Y(t) = Y(0) + Int(a(t)) = Y(0) + Int(X(t)/M), (1) где Y(0) – начальная скорость автомобиля. Предположим, что сила трения F пропорциональна скорости: F = K* Y(t), (2) где K* – коэффициент трения. С учетом влияния трения скорость автомобиля будет рассчитываться по формуле: Y(t) = Y(0) + int((X(t) – K* Y(t)/M), (1) 1. Пример САУ разомкнутого управления. Управление движением объекта с заданным режимом скорости без учёта трения. Масса автомобиля M=1. Необходимо обеспечить разгон автомобиля до скорости 100 (км.час), за 10 секунд.  Рис.5 Модель управление движением объекта с заданным режимом скорости без учёта трения На рис.6 даны графики управляющего сигнала X(t) и график скорости Y(t) 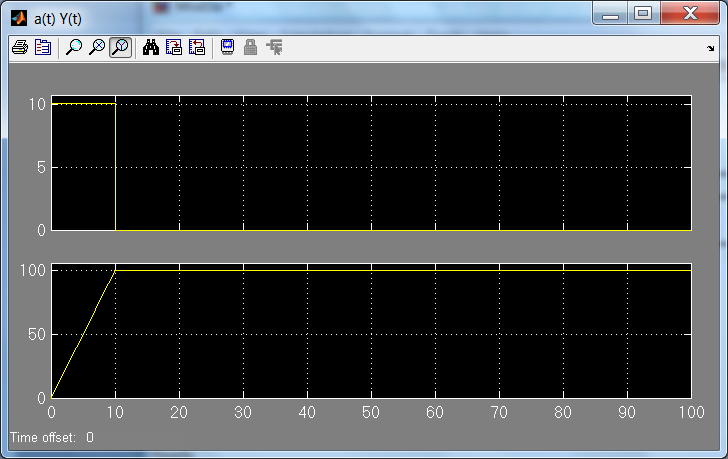 Рис.6 Графики управляющего сигнала X(t) и скорости Y(t) Пример САУ разомкнутого управления с компенсацией воздействия внешних факторов. Управление движением объекта с заданным режимом скорости и компенсацией влияния трения. Дано: коэффициент трения К=0.05  Рис.7 Модель управление движением объекта с заданным режимом скорости и компенсацией влияния трения. 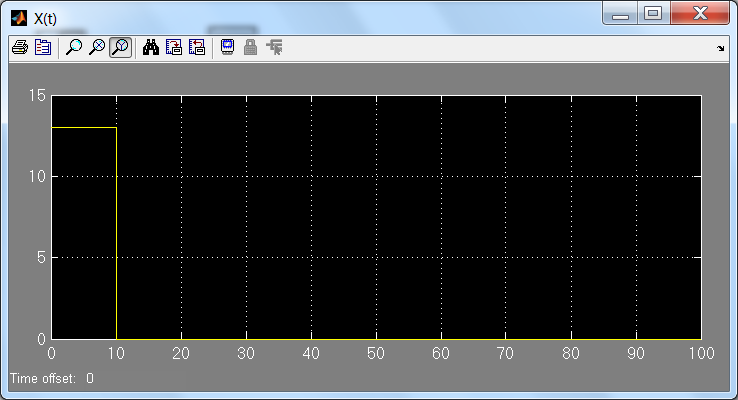 Рис.8. График сигнала с выхода регулятора Р1 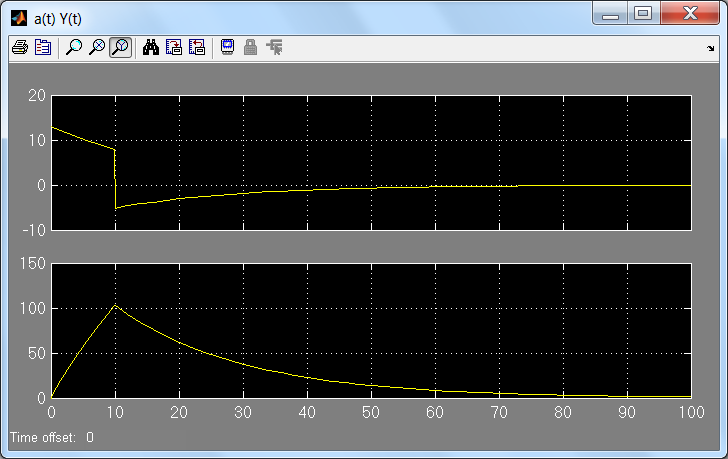 Рис.9. График ускорения автомобиля а(t) и скорости Y(t) без компенсации трения 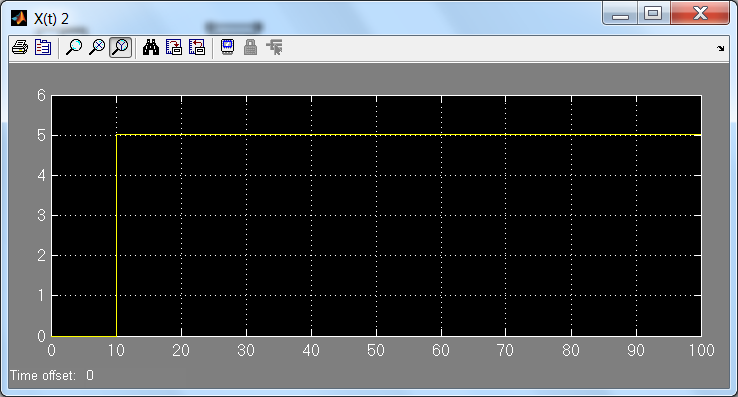 Рис.10. График сигнала с выхода компенсирующего регулятора Р2 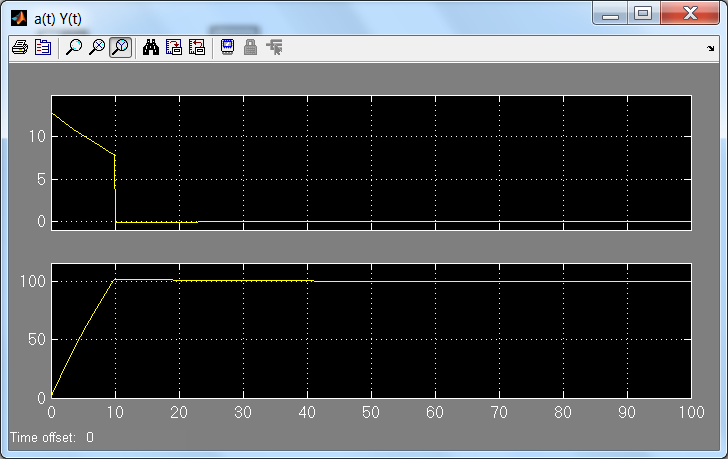 Рис10.. График ускорения автомобиля а(t) и скорости Y(t) с компенсацией трения 3. Пример САУ замкнутого управления. Управление движением объекта с заданным режимом скорости с изменяющимся коэффициентом трения. Введено ограничение на максимальную мощность двигателя (Хмакс. =20)  Рис.11 Модель управление движением объекта с САУ замкнутого управления без учёта влияния трения. 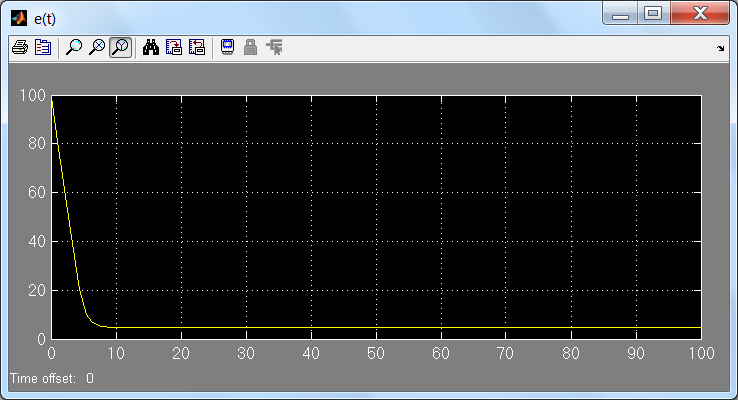 Рис12.. График отклонения скорости от заданного режима e(t) = Y*(t) – Y(t) (Y(t)=100). 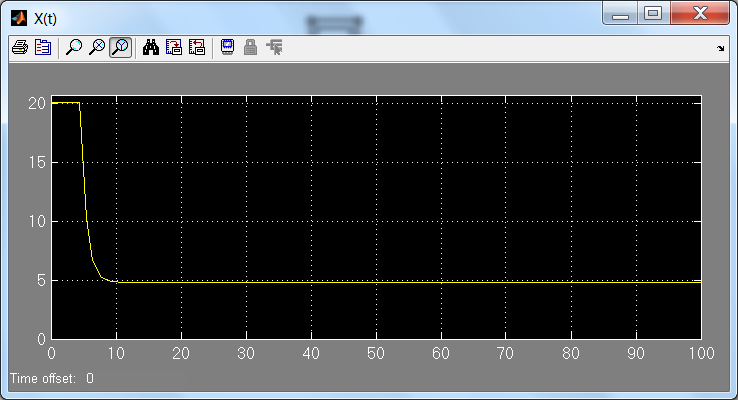 Рис.13. График регулирующего сигнала X(t) (мощность двигателя) 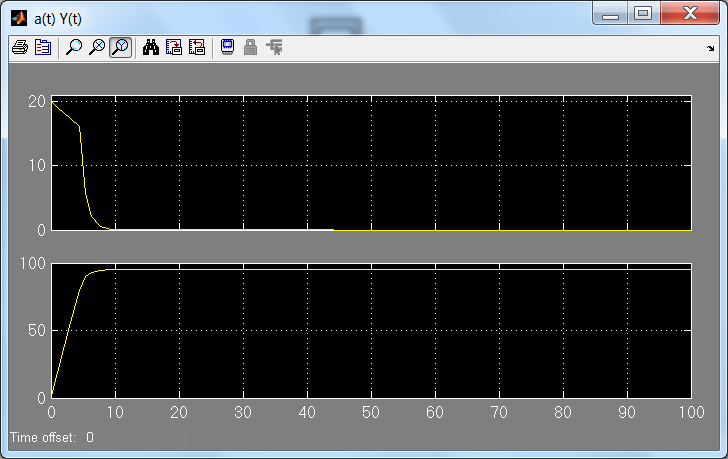 Рис104. График ускорения автомобиля а(t) и скорости Y(t) (движение без трения)  Рис.15 Модель управление движением объекта с САУ замкнутого управления и компенсацией влияния трения.  Рис16.. График отклонения скорости от заданного режима e(t) = Y*(t) – Y(t) (Y(t)=100). 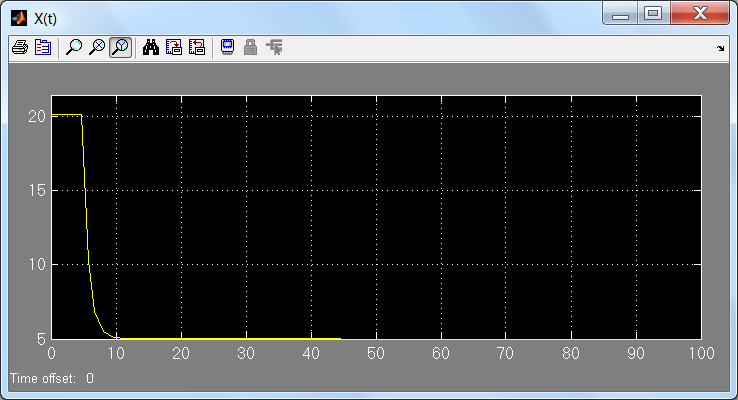 17. График регулирующего сигнала X(t) (мощность двигателя) 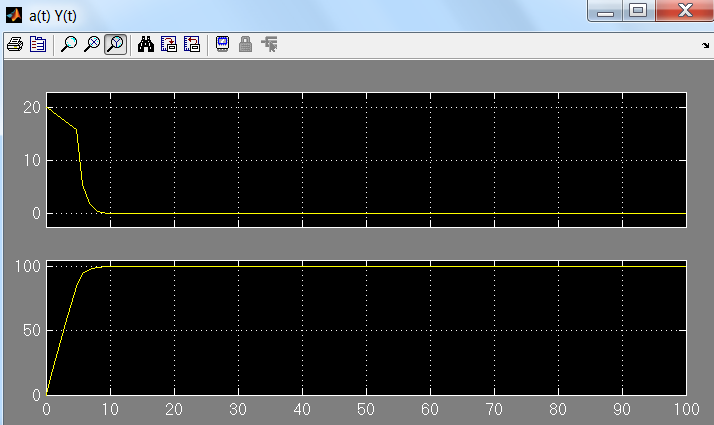 Рис18. График ускорения автомобиля а(t) и скорости Y(t) (движение с компенсацией трения) ТИПЫ САУ ПО ЗАДАЧАМ УПРАВЛЕНИЯ Виды задающего воздействия. (Задающее воздействие – это желаемое поведение системы, желаемый алгоритм поведения) В зависимости от вида задающего воздействия принято классифицировать САУ по задачам управления: – Система стабилизации: Yзад = const. – Система программного управления: Yзад(t) – функция времени, которая заранее известна. – Системы следящие Yзад(t) – функция времени, которая заранее не известна. КЛАССИФИКАЦИЯ САУ Классификация САУ должна учитывать способы математического описания, характер протекания процессов и качество управления. Разделение САУ на подклассы осуществляется: по виду уравнений описывающих САУ: линейные или нелинейные; по характеру передачи сигналов: непрерывные или дискретные; по характеру процессов: детерминированные или стохастические (случайные); по критерию качества: с заданным качеством или оптимальные. |