Лекция 1 лекция 3 робот как объект управления
 Скачать 207.5 Kb. Скачать 207.5 Kb.
|

|
Лекция №1 ЛЕКЦИЯ №3 РОБОТ КАК ОБЪЕКТ УПРАВЛЕНИЯ П  роизвольную систему управления (необязательно робототехническую) можно представить в следующем виде. Рис. 1. Система управления Специфической особенностью роботов, отличающей их от других автоматических устройств, является то, что у них в качестве исполнительного механизма используется многозвенный манипулятор, обладающий несколькими степенями свободы. В дальнейшем мы сосредоточим свое внимание на управлении манипулятором робота. Манипулятор состоит из нескольких звеньев, сочленения которых могут быть поступательными, либо вращательными. В первом случае перемещение одного звена относительно другого описывается параметром Задачу управления рукой робота можно сформулировать следующим образом: необходимо найти моменты, развиваемые приводами в сочленениях ( Если робот должен двигаться медленно, то на систему не действуют какие-либо значительные взаимовлияющие динамические силы. Простым решением этой задачи является независимое управление каждым сочленением. Этот способ подходит для большинства приложений. Если движения робота быстрые, то сочленениями нельзя управлять независимо, поскольку динамическое взаимовлияние между звеньями становится чрезвычайно большим и требуется нелинейный или комбинированный алгоритм управления.  Рис.2. Блок-схема системы управления роботом На рисунке показана общая структура системы управления роботами. ЦАП – это цифро-аналоговый преобразователь, АЦП – аналого-цифровой преобразователь. Усилитель – это схемная часть привода, преобразующая маломощный аналоговый сигнал u(t) в напряжение V(t), которое непосредственно приводит в действие двигатели сочленений. Если двигателями сочленений являются двигатели постоянного тока с якорным управлением, то получаемый момент пропорционален току якоря. Помимо электромеханических приводов в робототехнических системах используются также гидравлические и пневматические. Приводы промышленных роботов. 1. Сравнительная характеристика приводов ПР 2. Пневматический привод: 3. Гидравлический привод: 4. Электрический привод. 5. Комбинированный привод: Сравнительная характеристика приводов ПР. Приводы ПР включают в себя двигатель, систему управления, передаточные механизмы, тормозные устройства, датчики обратной связи и коммуникации. Коммуникации необходимы для передачи энергии к приводам и передачи сигналов управления, а также для выполнения обратной связи. Выбор типа привода зависит от функционального назначения ПР. Основными факторами, определяющими выбор типа привода являются: назначение и условия эксплуатации, грузоподъемность и требуемые динамические характеристики конструкции, а также вид системы управления. К приводу любого вида предъявляют общие требования: – минимальные габаритные размеры при высоких энергетических показателях, обеспечивающие большое значение отношения выходной мощности к массе; – возможность работы в режиме автоматического управления и регулирования, обеспечивающем оптимальные законы разгона и торможения при минимальном времени переходных процессов; – быстродействие, т.е. осуществление движений исполнительных механизмов с высокими скоростями и малой погрешностью позиционирования; – малая масса элементов привода при высоком КПД всей конструкции; – надежность и долговечность элементов конструкции; – удобство монтажа, ремонта, обслуживания, переналадки и бесшумность работы. В зависимости от используемого вида энергии приводы подразделяют на гидравлические, пневматические, электрические и комбинированные (например, электрогидравлические, гидропневматические и др.) Пневматические приводы применяются в 20…30% (по другим оценкам в 40-50%) серийно выпускаемых ПР. Их используют для легких и средних (по грузоподъемности до 20 кг) ПР при числе степеней подвижности 2…3. Погрешность позиционирования в этих приводах не превышает ± 0,1 мм. Скорость ведомого звена привода при линейном перемещении составляет до 1000 мм/с, при угловом – до 60 об/мин. Они имеют простую конструкцию, низкую стоимость и достаточно надежны в работе. Вследствие низкой регулировочной способности их мало используют в позиционных и контурных режимах работы, и они имеют цикловое управление, как простейший вариант позиционного (задается две точки – начало и конец перемещения). Гидравлические приводы применяются в 30% серийно выпускаемых средних и тяжелых ПР при числе степеней подвижности 3…4. Погрешность позиционирования в этих приводах не превышает ± 0,5 мм при скорости линейного перемещения до 0,8…1200 мм/с. Эти приводы имеют сложную конструкцию, высокую стоимость изготовления и эксплуатации. Гидравлический привод имеет хорошую регулировочную способность, и его используют в ПР с позиционным и контурным режимом работы. Электрические приводы используются в 40…50% серийно выпускаемых ПР со средней грузоподъемностью и числом степеней подвижности 3…6. Точность позиционирования электрического привода достигает значений до ± 0,05 мм. Их применяют как в позиционном, так и в контурном режимах работы. Преимуществами электроприводов являются более высокая экономичность, КПД, удобство сборки и хорошие регулировочные свойства. Как правило, в электроприводах используют синхронные, шаговые и двигатели постоянного тока. Асинхронные двигатели применяются реже, что связано с трудоемкостью управления частотой вращения. Комбинированные приводы позволяют максимально использовать достоинства отдельных типов приводов. Чаще всего в промышленных роботах применяют комбинацию пневматического и гидравлического приводов (пневмогидравлические и гидропневматические), а также электрического и гидравлического (электрогидравлические). В конструкциях ПР пневмогидравлические приводы имеют ограниченное применение. В них в качестве исполнительного органа используется пневмоцилиндр, а стабилизация его скорости и гидравлическая фиксация осуществляется гидросистемой. В гидропневматическом приводе в качестве исполнительных двигателей применяют гидродвигатели, а пневмосистема применяется для создания необходимого давления в гидросистеме, что позволяет отказаться от гидронасосных станций. Пневматический привод Элементы пневмопривода Пневмопривод применяется в основном в ПР с цикловым управлением. Функционально такой пневмопривод можно разделить на следующие узлы: – блок подготовки рабочего тела (воздуха); – блок распределения сжатого воздуха; – блок исполнительных двигателей; – система передачи сжатого воздуха между устройствами привода. Блок подготовки воздуха является обязательным для ПР с пневмоприводом. Воздух осушают и очищают от пыли. Блок распределения сжатого воздуха содержит устройства, с помощью которых по заданной программе можно открыть или закрыть доступ сжатого воздуха в рабочие полости исполнительных двигателей. В качестве распределителей служат устройства, где запорными устройствами служат золотники и клапаны. Обычно используют пневмораспределители с управлением от электромагнитов и командоаппаратов. Однако при определенных условиях (взрывоопасная среда, радиация) используются распределители с пневматическим управлением. В качестве блока исполнительных двигателей используются цилиндры с прямолинейным или вращательным движением поршня одно- или двустороннего действия. На каждую степень подвижности предусматривается свой исполнительный двигатель (пневмоцилиндр), конструкция которого обеспечивает заданные перемещения, скорости и усилия. Захватное устройство ПР также может иметь двигатель, который обеспечивает захват объекта манипулирования, его удержание при перемещении и освобождение после установки в заданной точке. Рабочий цикл выполняется каждым двигателем в определенной последовательности в соответствии с требованиями технологического процесса и осуществляется по программе, выполняемой управляющим устройством робота, которое входит в состав СПУ. В системы передачи сжатого воздуха между устройствами привода используются пневмопроводы различного сечения, рассчитываемого исходя из заданных условий работы. Типовая схема и элементы управления. Рассмотрим типовую схему пневмопривода одной степени подвижности ПР (рис. 10). Она состоит из входного штуцера 12, через который осуществляется подвод сжатого воздуха под давлением 0,5…0,6 МПа из заводской пневмосети к ПР. Вентилем 11 производится включение привода в работу. Влагоотделитель 10 служит для подготовки сжатого воздуха и удаления из него водяного конденсата, который вызывает коррозию и увеличивает трение трущихся деталей. Далее посредством соответствующей регулировки редукционного клапана 9, производится предварительная настройка давления сжатого воздуха, поступающего к элементам привода. Это давление является номинальным и устанавливается согласно техническим требованиям на данный ПР. Маслораспылитель 8 также участвует в подготовке воздуха и обеспечивает распыление масла, необходимого для смазки перемещающихся элементов исполнительного двигателя (цилиндра 2) и распределителя 6. В качестве последних используются т.н. золотники и клапаны. Обычно управление распределителем производится от электромагнита. Распределители служат для перераспределения потоков рабочего тела, в данном случае сжатого воздуха, в соответствии с управляющей программой и требованиями технологического процесса. 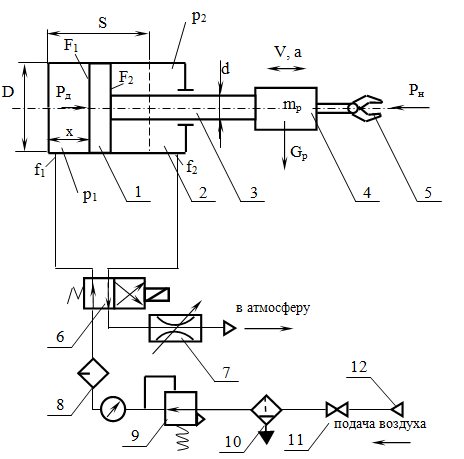 Рис. 3 – Типовая схема пневмопривода Согласно схеме, изображенной на рисунке 10, перемещение поршня 1 на шаг S происходит вправо вместе со штоком 3, рукой 4 и УЗ 5. Дроссель 7 служит для регулировки скорости перемещения подвижных частей двигателя. К числу основных параметров, характеризующих пневмодвигатель, относятся: эффективная площадь поршня в рабочей (поршневой) F1 и выхлопной F2(штоковой) полостях; рабочий ход поршня S; текущая координата x; скорость v и ускорение а поршня; масса mpисполнительного устройства (напр., руки ПР); давление воздуха в рабочей р1 и выхлопной полотях р2; эффективные площади сечений трубопроводов на входе f1 и выходе f2; диаметры поршня D и штока d; движущая сила РД и сила нагрузки (потребная) РН. Демпфирование пневмопривода Ввиду высоких скоростей движения поршня пневмодвигателя необходимо осуществлять его торможение в конце прямого и обратного хода. Это повышает точность позиционирования и снижает динамические нагрузки в ПР. В пневмоприводах ПР используются два типа торможения: с помощью демпфирующих устройств или путем дросселирования (рис.3). При использовании демпфирующих устройств (внешними устройствами) торможение происходит на небольшом участке в конце хода при подходе к точке позиционирования. При использовании дросселей (торможение рабочим телом) разгон и торможение осуществляется на большей части хода, чем достигается требуемый закон изменения кинематических параметров в течение всего цикла движения. Торможение демпфером основано на гашении энергии движения. Наиболее широкое применение получили гидравлические демпферы и меньшее – механические. Торможение поршня с использованием рабочего тела достигается путем уменьшения расхода воздуха из полости опорожнения за счет установки специального дросселя (поз.7 рис.3) и позволяет изменять площадь выходного сечения f2 по закону f2=f(x). При этом меняется значение давления и формируется необходимый закон движения поршня, т.е. регулируется скорость его перемещения. Такой способ торможения возможен только благодаря высокой сжимаемости воздуха и используется для роботов с грузоподъемностью до 5 кг. Позиционирование пневмопривода Позиционирование выходного звена (например, УЗ) в ПР с цикловым управлением обеспечивается по двум крайним точкам и составляет ±xmax; ±φmax – максимальный и минимальный ход поршня при линейном и угловом перемещении. В некоторых случаях требуется позиционирование выходного звена в промежуточных точках. В этом случае позиционирование осуществляется при помощи внешних механических упоров с демпфированием при подходе к каждому упору (к точке). Расчеты и практика показывают, что таких точек позиционирования в пневмоприводах может быть 6…9 и не более, вследствие высокой сжимаемости рабочего тела (воздуха) и скорости перемещения. Число точек позиционирования можно увеличить, если использовать т.н. позиционеры. Наиболее простая схема позиционирования представлена на рис. 4. 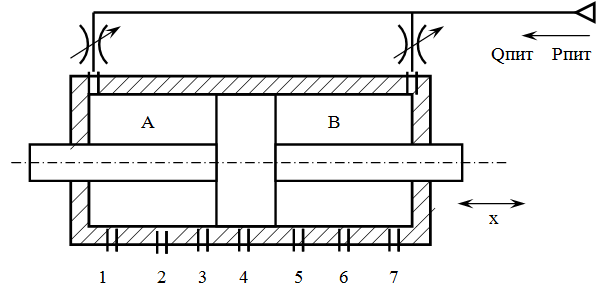 Рис. 4 – Схема позиционирования Пневмодвигатель выполнен в виде цилиндра с ложным штоком двустороннего действия. Питание подводится в обе полости одновременно. При равенстве давлений в полостях поршень находится в покое. Магистрали 1 – 7 служат для выхода воздуха в атмосферу. При открытии по команде системы управления одного из выходов давление в соответствующей полости понижается. Под действием разности сил поршень будет двигаться до тех пор, пока не перекроется выход и давления в полостях А и В не выровняются. Закрытие и открытие выхода может осуществляться механическим путем или пневмораспределителем. Механически выход закрывается самим поршнем. Такой способ позиционирования выходного звена применяется наиболее часто. Другим способом позиционирования служит применение механического тормоза, который служит для останова выходного звена. Торможение осуществляют в два этапа, на первом – уменьшается скорость выходного звена на 5–10% от максимальной. Здесь с помощью датчиков положения определяются точки торможения, в которых дальнейшее движение выходного звена начинает замедляться. На втором этапе происходит останов выходного звена в заданной точке с помощью тормоза. Позиционное управление в пневмоприводах ПР применяется для широкого диапозона грузоподъемности от 0,1 до 20 кг. и скоростей от 500 до 1000 мм/с. Гидравлический привод Область применения, достоинства и недостатки Выше отмечалось, что область применения гидродвигателей для привода ПР достаточно высока и заключается в 30% серийно выпускаемых средних и тяжелых ПР. Погрешность позиционирования в этих приводах довольно мала и не превышает ± 0,5 мм при скорости линейного перемещения до 0,8…1200 мм/с. Гидродвигатели в ПР применяются, как правило, для переносных степеней подвижности. Столь широкое применение гидропривода в конструкциях ПР объясняется прежде их достоинствами, такими как: – высокая энергоемкость; – быстродействие; – малая инерционность; – малая сжимаемость рабочей жидкости и за счет этого достаточно высокая жесткость статических нагрузочных характеристик; – хорошая возможность реализации автоматического управления и регулирования скорости исполнительных механизмов; – надежность работы и эксплуатации. Недостатки: Эти приводы имеют сложную конструкцию, высокую стоимость изготовления и эксплуатации, а также возможность утечек и необходимость охлаждения рабочей жидкости. В гидроприводах ПР применяются следующие основные типы гидродвигателей, которые иногда могут сочетаться с различными конструкциями механических передач: – линейные гидроцилиндры с поступательным движением штока; – поворотные гидродвигатели с ограниченным углом поворота; – гидромоторы. Все элементы гидро- и пневмоприводов стандартизованы и содержаться в справочной литературе. В отличие от пневмодвигателей, для гидродвигателей предусмотрен блок питания, который входит в состав ПР. Он содержит гидронасос, дроссели, фильтры, регуляторы давления и другие устройства (рис. 5). Схема гидродвигателя: элементы и параметры 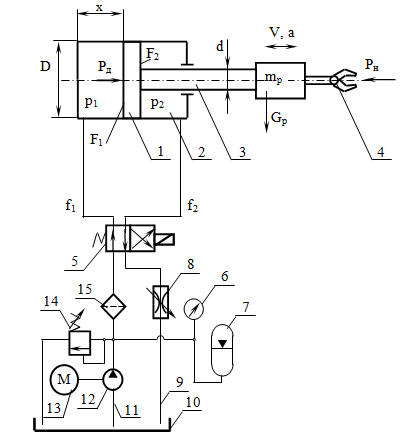 Рис. 5 – Схема гидродвигателя Гидродвигатель ПР содержит поршень 1, цилиндр двустороннего действия 2, шток 3 с рукой и захватным устройством 4. Подача и отвод масла выполняется гидрозолотником 5. В состав гидродвигателя также входят манометр 6, аккумулятор 7, дроссель 8 (регулируется скорость перемещения выходного звена – руки ПР), сливной трубопровод 9 и бак 10, а также заборный трубопровод 11, гидронасос 12, электродвигатель13, предохранительный клапан 14 и фильтр 15. К числу основных параметров гидродвигателя относятся: эффективные площади поршня в рабочей F1 и сливной F2полостях; ход поршня S; текущая координата x; скорость V и ускорение поршня а; масса mp руки ПР; давление масла в рабочей р1 и сливной р2 полостях; эффективные площади сечений трубопроводов в рабочей f1 и сливной f2 магистралях; диаметры поршня D и штока d; движущая сила РД и сила нагрузки РН. Электрический привод. Особенности, достоинства и недостатки В последнее время в мировой и отечественной практике применения ПР электрический привод находит все большее применение. Их не применяют только в роботах, предназначенных для работы во взрывоопасных средах и для работы с машинами, оснащенными гидросистемами, по соображениям унификации. Электроприводы новых серий ПР – это приводы с высокомоментными двигателями постоянного тока, бесколлекторными двигателями постоянного тока, силовыми шаговыми двигателями и реже асинхронными двигателями. Особенностями электроприводов ПР являются расширенный диапазон малых моментов (всего до 0,05 Нм), повышенная максимальная частота вращения (до 15 × 103 об/мин), уменьшенная инерция двигателей, возможность встраивания в ЭД электромагнитных тормозов и различных датчиков, а также механических и волновых передач. Основные достоинства применения электроприводов в ПР следующие: – компактная конструкция двигателей; – высокое быстродействие; – равномерность вращения; – высокий крутящий момент при максимальной скорости; – высокая степень надежности; – широкий диапазон регулирования по скорости и позиционированию, а также изменению моментов нагрузки; – возможность длительной работы в заторможенном режиме; – высокая точность срабатывания, которая обеспечивается применением цифровой измерительной системы и высокоточных импульсных датчиков; – взаимозаменяемость двигателей; – компактная конструкция различных преобразователей; – низкий уровень шума и вибрации и доступность электроэнергии. Недостатки применения электроприводов в ПР следующие: – ограниченное использование во взрывоопасных средах; – зависимость скорости выходного звена от внешней , что приводит к необходимости создания дополнительных контуров регулирования привода; – наличие дополнительной кинематической цепи между электродвигателем и рабочим органом ПР. Функциональна схема электропривода Электропривод современного ПР представляет собой комплекс приводов, каждый из которых управляет отдельной степенью подвижности. Рассмотрим на примере электроприводного ПР модели HdS05/06 (фирма GdA, Германия) наиболее распространенную функциональную схему (Рис. 6). 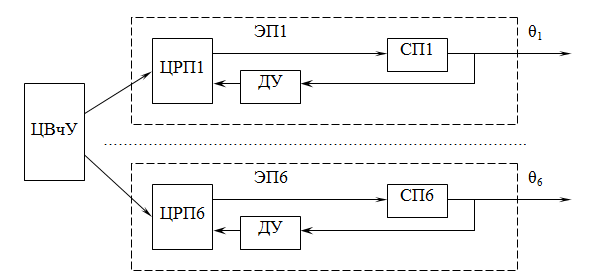 Рис. 6 – Функциональная схема управления электромеханического робота модели HdS05/06. Данный ПР обладает шестью степенями подвижности, обозначенными на схеме как θ1…θ6. Все шесть электроприводов (ЭП1…ЭП6) управляются от общего центрального вычислительного устройства (ЦВчУ) системы программного управления (СПУ) ПР. Центральное вычислительное устройство выдает сигналы на цифровые регуляторы положения (ЦРП1….ЦРП6) отдельных приводов. Цифровые регуляторы положения управляют сервоприводами (СП1…СП6) в соответствии с сигналами ЦВчУ и датчиков угла (ДУ), например, кодовых датчиков угла с фотоэлектрическим преобразованием. Одним из наиболее сложных и ответственных элементов в электроприводном ПР является сервопривод (СП). Функциональная схема сервопривода ПР приведена на рис. 7. 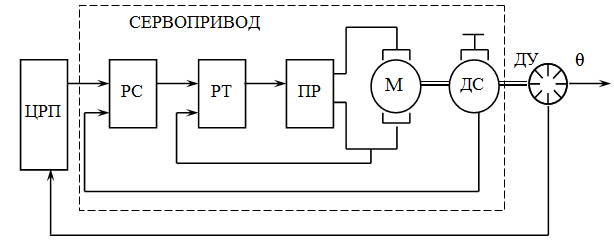 Рис. 17 – Функциональная схема сервопривода ПР Данная схема представляет собой аналогово-цифровую систему автоматического управления, в которой сочетаются преимущества комбинированной аналоговой системы, работающей по принципу трехконтурной системы подчиненного регулирования, с достоинствами цифровой системы (высокая точность и удобство программирования). Первый контур образован двигателем (М) с преобразователем (ПР) и регулятором тока (РТ). Во второй контур входят датчик скорости (ДС) и регулятор скорости (РС). В состав третьего контура дополнительно входят датчик угла (ДУ) и цифровой регулятор положения (ЦРП). В качестве регуляторов скорости и тока в ПР чаще всего используются аналоговые, а в последнее время – и цифровые, операционные усилители с помощью которых легко реализуется практически любой требуемый закон управления. Датчик скорости также может быть как аналоговым, так и цифровым. В ряде случаев применение датчика скорости не требуется, т.к. сигнал об изменении скорости может быть вычислен в цифровом регуляторе положения (ЦРП) путем дифференцирования сигнала с датчика угла (ДУ) Таким образом анализ функциональных схем, приведенных на рис.6 и рис. 7, показывает, что независимо от конкретной схемы электропривод ПР состоит из следующих элементов: – исполнительного элемента (двигателя); – преобразователя; – регуляторов тока, скорости и угла; – и датчиков обратной связи по току, скорости и углу. Современные тенденции развития робототехники таковы, что позволяют выпускать сервоприводы, которые конструктивно объединяют двигатель, преобразователь, датчики и регуляторы скорости и тока. |