ГСП. Лекция 2 Основные понятия тау. В окружающем нас мире повсюду протекают различные процессы управления
 Скачать 285.5 Kb. Скачать 285.5 Kb.
|

|
Лекция № 2 Основные понятия ТАУ. В окружающем нас мире повсюду протекают различные процессы управления. В управлении нуждается всё: отдельное транспортное средство, транспорт в целом, какое-либо техническое устройство, совокупность устройств, технологические процессы, цеха, заводы, промышленность, экономика, войска, и так далее. Суть всякого управления – организация и реализация целенаправленных воздействий на объект управления. Иначе – управление это процесс выработки управляющих воздействий по переводу объекта управления в желаемое состояние. Управление связано с понятиями: 1) объект управления (ОУ); 2) цель управления; 3) управляющее устройство (УУ), управляющее воздействие. Объект управления – понимают как объект (процесс) для достижения желаемых результатов функционирования которого, необходимы и допустимы специально организованные воздействия. Объект управления выделяется из окружающей среды как минимум двумя условиями: а) на объект управления можно воздействовать; б) это воздействие обеспечивает достижение поставленных целей, т.е. изменение состояния объекта управления (процесса) в нужном направлении. ОУ реализует процесс необходимый для достижения поставленной цели. В теории автоматического управления (ТАУ) объект управления рассматривается как преобразователь переменных входа U(t) и F(t) в выходную переменную Y(t) характеризующую состояние ОУ. З 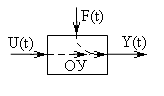 десь U(t) – управляющее воздействие, обеспечивающее необходимое (желаемое) состояние ОУ, то есть желаемое значение Y(t) характеризующее состояние ОУ (протекающий в ОУ процесс); десь U(t) – управляющее воздействие, обеспечивающее необходимое (желаемое) состояние ОУ, то есть желаемое значение Y(t) характеризующее состояние ОУ (протекающий в ОУ процесс); F(t) – внешнее возмущающее воздействие мешающее нормальному протеканию процесса в ОУ (нарушающее желаемое состояние ОУ и следовательно значения Y(t)). Если выходная величина Y(t) есть простая функциональная зависимость от U(t) и F(t), объект управления называется статическим или безинерционным. Если объект управления обладает инерционностью, то есть изменение Y(t) происходит с некоторой задержкой по отношению к изменениям U(t) и F(t), в этом случае ОУ называется динамическим и описывается дифференциальными, интегральными или разностными уравнениями. ОУ называется одномерным, если Y(t) скалярная величина и многомерным, если Y(t) , U(t), F(t) – величины векторные. Например: электродвигатель является одномерным объектом управления – управляемая величина скорость вращения или угол поворота вала двигателя. Самолет, подводная лодка и т.д.– являются многомерными ОУ, так как их управляемая величина курс движения определяется векторной величиной. В общем случае Y(t) = A{ U(t), F(t) }, где А оператор связи. Различают: технические, технологические, экономические, биологические, социальное, военное и другие объекты и процессы управления. Например. Технические объекты - движущиеся объекты, объекты энергетики, печи, теплообменники, двигатели и т.д. Управляемыми (выходными) переменными в технических объектах являются физико-химические параметры, характеризующие состояние и поведение объекта (скорость, температура, давление и т.д.). Первоначально теория автоматического управления развивалась применительно именно к техническим объектам. Экономические объекты - цех, завод, отрасль, предприятия торговли и сферы услуг, банки, страховые компании и т.д. Управляемыми величинами экономических объектов является прибыль, минимизация производственных затрат. Биологические объекты – живые организмы от простейших клеток до сложных организмов. В биологических объектах осуществляется поддержание и регулирование жизненно важных параметров организма таких как, температура организма, частота пульса, давление крови. Принципы управления. Задача построения САУ при заданном объекте управления, сводится к построению управляющего устройства. Не смотря на различие объектов управления, большое их разнообразие, построение устройств управления, базируются на ряде общих принципов, которые определяют на основании какой информации и как в системе формируются управляющие воздействия. Управление и информация - понятия неразрывно связанные. Процесс управления охватывает три основные группы действия: 1. сбор информации необходимой для принятия решения о выработке управляющего воздействия; 2. принятие решения о выработке управляющего воздействия; 3. осуществление (реализация) управляющего воздействия. Управление невозможно без достаточной информации: 1. о цели управления; 2. о возмущении окружающей среды; 3. о свойствах и состоянии объекта управления. В зависимости от характера и полноты доступной информации реализуют разные принципы управления. Выбор принципа управления зависит от ряда факторов: 1. назначения системы; 2. характера изменения задающего воздействия; 3. внешних возмущений; 4. требований к системе и т.д. Различают следующие основные принципы управления. 1.принцип разомкнутого управления; 2.принцип компенсации (управление по возмущению); 3.принцип обратной связи (управление по отклонению); 4. комбинированное управление. Принцип разомкнутого управления – управляющее воздействие, вырабатывается только на основании задающего воздействия и априорной информации о возмущающих воздействиях, о значении управляемой величины, состоянии объекта управления, т.е. вектор управления, формируются только по вектору задания. 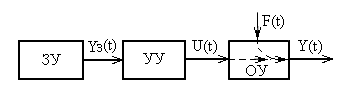 ОУ – объект управления; УУ – управляющее устройство; ЗУ - задающее устройство; У - управляемая величина; F - внешнее возмущающее воздействие; U- управляющее воздействие. УЗ – заданное (желаемое) значение управляемой величины. Схема разомкнута, близость У к УЗ определяется только конструкцией и подбором физических закономерностей, действующих в данной системе. Достоинства: простота реализации. Недостатки: возможность изменения У независимо от УЗ под воздействием возмущающих факторов или из-за изменения параметров системы. Принцип применим при мало меняющихся внешних воздействиях, параметрах системы и не высоких требованиях к точности управления. Пример: Система управления напряжением генератора постоянного тока. Объектом управления (ОУ) является генератор постоянного тока (ГПТ), управляемой величиной – напряжение генератора (Uг), управляющим воздействием, прикладываемым к объекту управления – напряжение возбуждения, определяющее ток возбуждения (Iв). 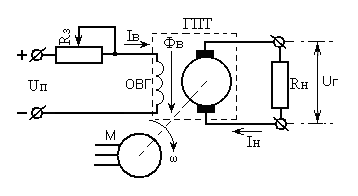 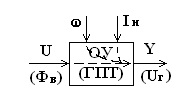 Напряжение холостого хода ГПТ (электродвижущая сила – Е) определяется выражением: Uгхх = Е = КωФв, где К – постоянный коэффициент определяемый конструктивными параметрами ГПТ, ω – скорость вращения якоря генератора, Фв = IВw – поток возбуждения, w – число витков обмотки возбуждения (ОВГ), IВ – ток возбуждения. Таким образом, Е определяется током возбуждения (IВ), который можно регулировать с помощью сопротивления задатчика (Rз) и скоростью вращения якоря генератора ω. Напряжение на выходе генератора равно: Uг = Е – IнRя = КωФв -IнRя, где Rя – сопротивление якорной цепи генератора, а IнRя – падение напряжения в якорной цепи. Возмущающими факторами в приведенной системе могут быть скорость вращения якоря генератора и ток нагрузки генератора. При неизменном положении RЗ и постоянной скорости вращения генератора (ω=const) уменьшение сопротивления нагрузки приводит к увеличению тока нагрузки (IН) и, следовательно, к уменьшению выходного напряжения Uг, то есть регулируемая величина изменяется под воздействием возмущающего фактора при постоянной заданной величине. Uг также изменится при изменении скорости вращения якоря генератора (ω). То есть: Uг = f(Фв, Iн, Нагрузочная характеристика системы (графическая зависимость регулируемого параметра от нагрузки) показана на рисунке: 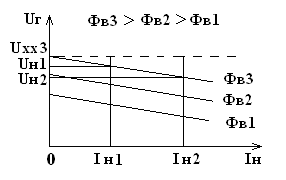 Из графика видно, что при постоянных IВ (Фв) и ω с увеличением тока нагрузки выходное напряжение генератора уменьшается. При увеличении потока возбуждения (Фв) нагрузочная характеристика генератора смещается вверх. Управление по возмущению (принцип компенсации) – управляющее воздействие вырабатывается на основании информации о задающем и контролируемых возмущающих воздействиях, действующих на объект управления. F 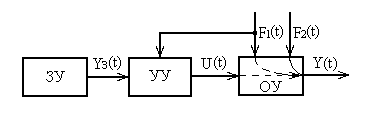 1 - контролируемое возмущающее воздействие; 1 - контролируемое возмущающее воздействие;F2 - неконтролируемое возмущающее воздействие. U - вырабатывается таким образом, чтобы скомпенсировать вредное влияние контролируемого возмущающего воздействия - F1. И 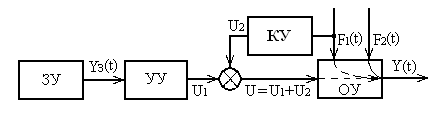 наче, принцип управления по возмущению (принцип компенсации) может быть представлен следующей схемой. наче, принцип управления по возмущению (принцип компенсации) может быть представлен следующей схемой.Где КУ – компенсирующее устройство или регулятор по контролируемому возмущению. Достоинства: 1) система инвариантна, т.е. независима по отношению к контролируемому (измеряемому) возмущающему воздействию. 2) система быстродействующая (принцип применим для управления инерционными объектами). Недостатки: 1) учитывается одно или ограниченное число возмущающих воздействий, на которые настроено компенсирующее устройство (регулятор по возмущению). 2) зависимость управляющего воздействия от возмущающего фактора может быть сложной и поэтому реализуется лишь приближенно. Пример. Система регулирования напряжения генератора постоянного тока 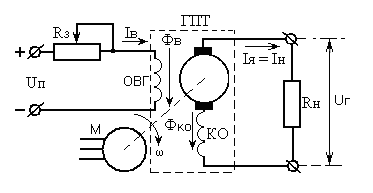  Принципиальная схема системы Нагрузочные характеристики системы. В данную схему, по сравнению с приведенной выше, добавлена компенсирующая обмотка – КО, создающая дополнительный поток возбуждения ФКО. Выходное напряжение генератора в этом случае определяется выражением: Uг = Е – IнRя = Кω(Фв + ФКО) – Iн(Rя.+RКО) При наличии КО увеличение тока нагрузки (Iн) приводит к увеличению дополнительного потока возбуждения ФКО и соответственно к увеличению Ег, что компенсирует уменьшение напряжения Uг из-за увеличения Iн. На практике осуществить точную компенсацию вредного влияния возмущающего воздействия не удается. Так на графике видно, что при IН1 имеет место перекомпенсация, а при IН2 недокомпенсация напряжения Uг. В рассмотренной схеме нет компенсации изменения выходного напряжения из-за изменения приводной скорости вращения генератора, так как в данном примере возмущения от изменения скорости вращения якоря генератора является неконтролируемыми. Управление по отклонению (принцип обратной связи) – управляющее воздействие вырабатывается на основе информации об отклонении управляемой величины от заданной без учета причин вызвавших это отклонение. 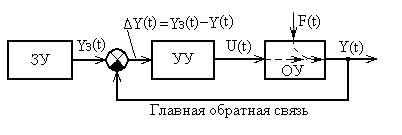 Достоинства: 1) система реагирует на сам факт, наличия отклонения ΔУ не зависимо от причин вызвавших это отклонение. 2) Следствием этого достоинства является отсутствие жестких требований к стабильности характеристик элементов системы. Недостатки: принцип не применим для инерционных объектов. Часто управляющее воздействие вырабатывается не только в функции отклонения (ΔУ), но и в функции производных и интегралов этого отклонения.  Управление в функции отклонения называется регулированием, управляющее устройство (УУ) в этом случае называется регулятором, а вся система называется системой автоматического регулирования (САР). Характерной особенностью данного принципа управления является наличие главной обратной связи необходимой для определения ΔУ. Кроме главной обратной связи в системах могут быть местные обратные связи, которые служат для улучшения динамических характеристик систем. Пример: Система регулирования (стабилизации) напряжения генератора постоянного тока. Объектом управления (ОУ) (смотри рисунок выше) является генератор постоянного тока (ГПТ), управляемой величиной – напряжение генератора (Uг), управляющим воздействием, прикладываемым к объекту управления – напряжение возбуждения, определяющее ток возбуждения (Iв). 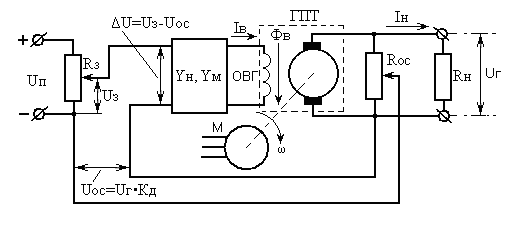 На схеме использованы обозначения: Rз – сопротивление задатчика; Yн, Yм – усилитель по напряжению и мощности; Rос – сопротивления делителя напряжения; Кд – коэффициент делителя напряжения; ГПТ – генератор постоянного тока; М – приводной мотор; ω – скорость вращения ГПТ. Комбинированное управление – сочетает управление по возмущению и отклонению. 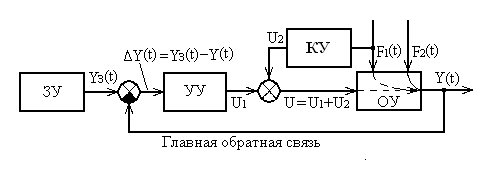 КУ- компенсирующее устройство. Данный принцип сочетает достоинства принципов управления по возмущению и отклонению, является наиболее точным и имеет широкое применение на практике. ЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁЁ Понятие статических и астатических систем регулирования. Системы автоматического регулирования (САР) подразделяются на статические и астатические. Статическими называются САР, у которых в установившемся режиме (статическом стационарном) присутствует ошибка регулирования, зависящая от нагрузки. В таких системах все элементы контура регулирования являются статическими элементами. Статическими называются элементы (звенья) систем, у которых в установившемся режиме существует однозначная связь между входными и выходными величинами. Например: электронный усилитель является статическим элементом, если его параметры считать постоянными, неизменными во времени. При этом: Uвых. = Uвх.*Kусил.. При указанных допущениях, двигатель постоянного тока также является статическим звеном, если его выходной управляемой величиной (параметром) является скорость вращения вала двигателя (Ω), а входной управляющей величиной – напряжение на якоре двигателя (Uякоря двиг.): Ω = Кдв*Uякоря двиг, где Кдв. – коэффициент, определяемый параметрами двигателя и условиями его работы. Покажем, что в статических САР в статическом стационарном режиме всегда присутствует ошибка регулирования, величина которой зависит от величины нагрузки. Упрощенная функциональная схема САР представлена на рис.1.1. 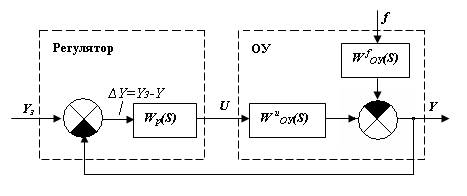 Рис.1. Упрощенная функциональная схема САР На схеме использованы обозначения: Yз – задающее значение; Y – выходная управляемая величина; U – управляющее воздействие; F – возмущающее воздействие (нагрузка); YYз - Y – ошибка регулирования; ОУ – объект управления. Wр(S) – передаточная функция регулятора; WuОУ(S) – передаточная функция объекта управления по управлению; WfОУ(S) – передаточная функция объекта управления по возмущению. Рассмотрим статический стационарный, то есть установившийся режим, когда параметры системы и входные величины не меняются во времени. Введем обозначения: k0 – коэффициент передачи ОУ по управляющему воздействию; kf – коэффициент передачи ОУ по возмущающему воздействию; kp – коэффициент передачи регулятора; Yз, F и Y– соответственно: задающее, возмущающее воздействия и регулируемая (управляемая) величина; ∆Y – ошибка регулирования. Установившееся состояние рассмотренной системы описывается следующими уравнениями:  (1) Следовательно, значение выходной (регулируемой) величины Y при прочих постоянных условиях зависит от нагрузки, а именно, уменьшается с увеличением нагрузки f. Из уравнения (1) определим ошибку регулирования Таким образом, показано, что в статических системах регулирования в стационарном статическом режиме всегда присутствует ошибка регулирования, зависящая величины нагрузки. Из формулы (2) видно, что влияние Чаще для оценки зависимости ошибки регулирования от нагрузки используется понятие статизм. Нагрузочной характеристикой называется зависимость регулируемого параметра от нагрузки (возмущения). Приведем пример нагрузочной характеристики для генератора постоянного тока (ГПТ). Управляемым параметром ГПТ является напряжение, а нагрузкой (возмущением) – ток нагрузки. 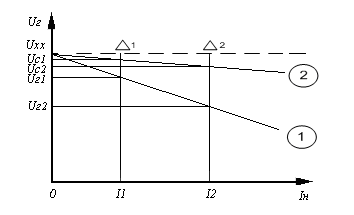 Рис.2. Нагрузочные характеристики: 1 - для генератора постоянного тока; 2- для статической системы регулирования напряжения ГПТ. Нагрузочная характеристика системы имеет существенно меньший наклон и обеспечивает меньшую зависимость регулируемого параметра от нагрузки. Статизм системы связан со статизмом объекта управления следующим выражением: Пример статической системы регулирования уровня жидкости в емкости (рис.3). 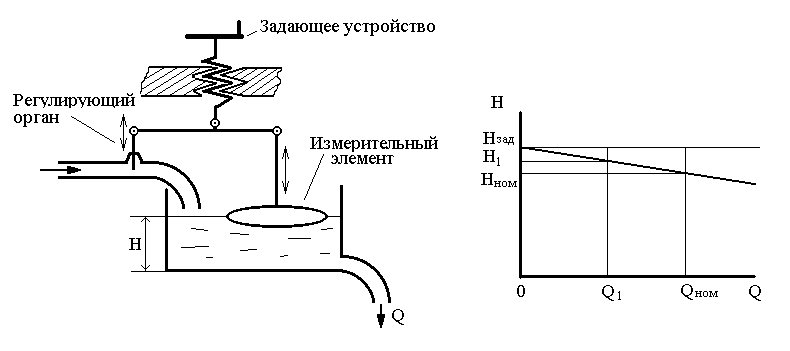   Рис.3. Система регулирования уровня жидкости (слева) и ее нагрузочная характеристика (справа). Объектом управления является емкость с жидкостью, управляемым (регулируемым) параметром является уровень жидкости Н, зависящий от расхода (Qрасх) и притока (Qприт) жидкости. Назначение системы поддерживать постоянным (стабилизировать) уровень жидкости независимо от величины Qрасх . При отсутствии расхода жидкости (Qрасх = 0) уровень Н равен заданному (НЗ), который устанавливается задающим устройством, заслонка регулирующего устройства полностью закрыта, то есть Qприт = 0. В случае расхода жидкости (Qрасх › 0) в установившемся режиме после окончания переходного процесса количество втекающей жидкости равно количеству вытекающей (Qприт = Qрасх.) и при этом заслонка регулирующего органа приоткрыта, что в данной системе возможно только при уменьшении уровня Н. При увеличении Qрасх., для сохранения баланса ( Как показано выше, статическая ошибка, обусловленная возмущающим воздействием (нагрузкой), может быть уменьшена за счет увеличения коэффициента усиления контура регулирования. Ошибка также может быть устранена путем введения в систему дополнительного канала управления по этому возмущению. Пример 2. Статическая система регулирования скорости вращения двигателя постоянного тока 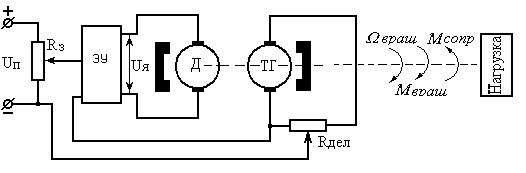 Рис.4. Принципиальная схема САР Обозначения, используемые на схеме: RЗ – сопротивление задающего устройства; ЭУ – электронный усилитель; Д – двигатель постоянного тока с возбуждением постоянными магнитами; ТГ – тахогенератор (измерительный генератор постоянного тока с возбуждением постоянными магнитами); Rдел. – сопротивление делителя напряжения обратной связи. 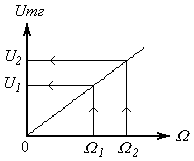 Характеристика тахогенератора «вход – выход» приведена на рис. 5. По виду характеристики видно, что тахогенератор, как и все остальные элементы контура регулирования (сравнивающее устройство, электронный усилитель, двигатель постоянного тока, делитель напряжения) является статическим звеном. Следовательно, рассматриваемая система является статической. При изучении данного материала рекомендуется самостоятельно построить и объяснить нагрузочную характеристику данной системы стабилизации скорости вращения двигателя постоянного тока. Астатические системы автоматического регулирования Астатические системы автоматического регулирования от статических систем отличаются отсутствием в статическом стационарном режиме статической ошибки регулирования зависящей от величины нагрузки. Ошибка регулирования в астатических системах является постоянной по величине и определяется лишь порогом чувствительности контура регулирования. Для обеспечения астатического регулирования в контуре регулирования необходимо устранить жесткую зависимость между положением регулирующего органа и значением регулируемой величины. В этом случае регулируемую величину можно поддерживать постоянной при любой допустимой нагрузке. Для этого в контур регулирования необходимо включить астатическое звено. Астатическое звено отличается от статического отсутствием однозначной зависимости между входной (Хвх), и выходной (Yвых.) величинами. В астатических звеньях при Хвх, равном нулю, Yвых. может иметь любое значение из допустимого диапазона значений Yвых, а при Хвх, не равном нулю, выходная величина изменяется с постоянной скоростью V, пропорциональной входной величине. Примером астатического звена является двигатель постоянного тока, если выходной величиной считать угол поворота вала двигателя, а входной величиной напряжение якоря двигателя. При этом зависимость выходной величины от входной описывается выражением: Как видно из формулы (1), в астатических звеньях выходная величина зависит не только от значения входной величины, но и от времени её действия. Следует обратить внимание на тот факт, что одно и то же звено (например, двигатель постоянного тока) в зависимости от рассматриваемых входных и выходных величин может быть статическим или астатическим. Так у двигателя постоянного тока, как отмечалось выше, скорость вращения вала якоря (Ω) пропорциональна напряжению якоря двигателя: Ω = Кдв*Uяк . В этом случае двигатель постоянного тока является статическим звеном. Примером астатического звена является электрическая цепь, показанная на рис.6. В 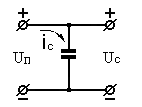 данной электрической цепи входной величиной является ток заряда конденсатора ic, а выходной величиной напряжение заряда конденсатора, которое определяется по формуле: данной электрической цепи входной величиной является ток заряда конденсатора ic, а выходной величиной напряжение заряда конденсатора, которое определяется по формуле: Рис.6. Графическая зависимость напряжения заряда конденсатора от величины тока заряда и времени заряда показана на рис.7. И 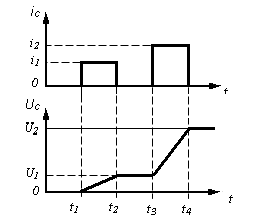 з графика видно, что при постоянном значении входной величины (тока заряда конденсатора) выходная величина (напряжение на конденсаторе), не остается постоянной, как это имеет место в статическом звене, а увеличивается с постоянной скоростью. При нулевом значении входной величины выходная величина остается постоянной, равной значению определенном последним значением входной величины. з графика видно, что при постоянном значении входной величины (тока заряда конденсатора) выходная величина (напряжение на конденсаторе), не остается постоянной, как это имеет место в статическом звене, а увеличивается с постоянной скоростью. При нулевом значении входной величины выходная величина остается постоянной, равной значению определенном последним значением входной величины.Передаточная функция идеального астатического (иначе, интегрирующего) звена имеет следующее выражение: Рис.7 Пример астатической системы регулирования уровня жидкости приведен на рис.8. 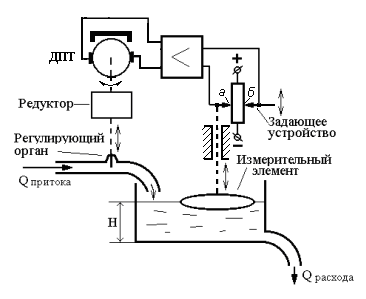 Рис.8. Астатическая система регулирования уровня жидкости (пунктиром показаны механические связи). Система находится в установившемся состоянии (состоянии равновесия) при График зависимости уровня жидкости Н от нагрузки (количества вытекающей жидкости Qрасх. ) представлен на рис. 9. 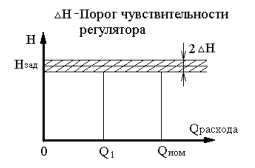 Рис.9. Зависимость уровня жидкости H от Qрасхода (величины нагрузки). Ошибка регулирования равна ∆Н и определяется только зоной нечувствительности контура регулирования. Точность линейных САР в статическом стационарном режиме Рассмотрим точность линейных САР в статическом стационарном режиме. Структурная схема САР в общем случае имеет вид, приведенный на рис.10. 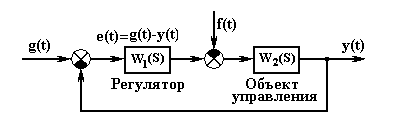 Рис.10. Структурная схема САР Напомним, что для линейной САР справедлив принцип суперпозиции (наложения). С учётом этого, по приведенной структурной схеме определим для установившегося состояния изображение по Лапласу: полной ошибки регулирования: Где При стационарном статическом режиме внешние воздействия постоянны по величине, то есть: g(t) = g0 – const; и, соответственно, имеем f(t) = f0 – const; и Используя формулу предельного перехода, получим: Из формулы (3) видно, что в стационарном статическом режиме в системе присутствуют две составляющие статической ошибки, обусловленные задающим и возмущающим воздействиями. Определим выражение ошибки для статической системы. В этом случае передаточные функции регулятора и объекта управления не содержат интегрирующих звеньев и, следовательно, их передаточные функции имеют вид: Здесь K1иK2 статические коэффициенты передачи соответственно регулятора и объекта управления. B1(S), B2(S), D1(S), D2(S) – полиномы числителя и знаменателя соответствующих передаточных функций имеющих вид: D(S)=d0Sn+d1Sn-1+d2Sn-2+ +dn-1S+1. В установившемся состоянии при g(t) = g0 – const; и f(t) = f0 – const; S = 0 имеем: B1(0) = B2(0) = D1(0) = D2(0) = 1, то есть W1(0) = K1, и W2(0) = K2. В этом случае: Таким образом, в статической системе присутствуют обе составляющие ошибки, обусловленные задающим и возмущающим воздействиями. Из приведенной формулы видно, что величину статической ошибки можно уменьшить за счёт увеличения K1, однако, увеличение коэффициента усиления регулятора снижает запас устойчивости системы и при некотором значении коэффициента усиления разомкнутой системы (Краз = К1*К2) система становится неустойчивой. Таким образом, требования точности и устойчивости – противоречивы. В случае астатической системы возможны два варианта: 1 – астатический объект и статический регулятор; 2 – астатический регулятор и статический объект. Рассмотрим первый случай – астатический объект и статический регулятор. При S = 0 имеем: B1(0) = B2(0) = D1(0) = D2(0) = 1, то есть W1(0) = K1, а W2(0) = K2/S Отсюда получим:  ; ;Таким образом, при S = 0 имеем В данном случае отсутствует ошибка, обусловленная задающим воздействием. Второй случай – астатический регулятор и статический объект. При S = 0 имеем: B1(0) = B2(0) = D1(0) = D2(0) = 1 то есть W1(0) = K1/S, а W2(0) = K2, отсюда получим:  ; ;При S = 0 имеем В этом случае отсутствуют обе составляющие ошибки. Выводы: 1 – в статической системе в стационарном статическом режиме присутствует ошибка регулирования зависящая от значений коэффициентов усиления К1 и К2 и внешних воздействий goи fo 2 – в астатической системе ошибка регулирования равна нулю, если возмущающее воздействие приложено после астатического звена. |