ЭМС ЛК 3 2014. Лекция 3. Введение в электромеханические системы
 Скачать 156 Kb. Скачать 156 Kb.
|

|
Лекция №3. ВВЕДЕНИЕ в ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ Задача преобразования механической (электрической) энергии в электрическую (механическую) в современной технике решается применением электромеханических преобразователей (ЭМП). Более 90% вырабатываемой электрической энергии производится с помощью ЭМП, которые работают как генераторы и не менее 60% этой энергии используется в автоматизированном электрическом приводе (АЭП), в котором ЭМП работает как двигатель. ЭМП как генератор, так и двигатель не работают обособленно, а объединены с различными средствами преобразования, управления или регулирования, контроля и защиты, образуя электромеханические комплексы – электромеханические системы (ЭМС). Следует заметить, что в ЭМС, возникают новые совокупности свойств, которыми не обладают их составные части, прежде всего ЭМП. Обратимость электромеханического преобразования энергии, общность структур, алгоритмов управления, методов исследования ЭМС генерирования электрической энергии и электрического привода различных механизмов, а иногда совмещение функций генерирования и электрического привода в одном агрегате делают целесообразным рассмотрение общих вопросов построения, исследования и проектирования ЭМС, что и ставится целью при изучении дисциплины «Электромеханические системы». 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ И ПРАКТИКИ ЭМС 1.1. Понятие технической системы (ТС) и ее описание Большинство определений ТС сводится к тому, что под системой понимают совокупность взаимосвязанных элементов, объединенных единой целью и общими целенаправленными правилами взаимоотношений или, другими словами — совокупность взаимосвязанных и взаимообусловленных элементов, обеспечивающих выполнение определенной потребности (функции) с требуемым качеством. В данном случае элементы представляют собой некоторые подсистемы по отношению к системе, являющиеся неделимыми. Следует также понимать различие между совокупностью и набором элементов. Только благодаря взаимосвязанным элементам, их совокупности, система приобретает качественно новые характеристики. Общие характеристики, хотя и обусловлены характеристиками отдельных элементов, но не присущи не только ни одному из них, но и простому набору невзаимосвязанных элементов. Система определяется не только наличием общих характеристик, но и целенаправленными взаимоотношениями как между элементами внутри системы, так и между системой и окружающей ее средой, что обеспечивает целенаправленность действий и возможность выполнения функций системы. В качестве примера можно рассмотреть коллекторный электродвигатель как совокупность взаимодействующих конструктивных элементов (якорь, индуктор, щеточно-коллекторный узел и др.), объединенных целью преобразования электрической энергии в механическую. Такая совокупность элементов благодаря наличию соответствующих связей, реализованных с учетом определенных закономерностей, обеспечивает присущие рассматриваемой системе электромагнитные, механические, тепловые характеристики. Важно, что ни один из элементов электродвигателя в отдельности не обладает этими характеристиками. При анализе электродвигателя можно выделить и функциональные подсистемы, например электромагнитную, механическую, тепловую. Первые две подсистемы в данном случае следует рассматривать как основные, поскольку именно с их помощью реализуется целевая функция электродвигателя, состоящая в преобразовании электрической энергии в механическую. Но при детальном анализе необходимо учитывать взаимное влияние всех подсистем электродвигателя, поскольку, например, сопротивления обмоток, мощность потерь, развиваемый момент, надежность работы электродвигателя существенно зависят от температуры. В свою очередь, температура элементов системы зависит от мощности потерь в электромагнитной и механической подсистемах, поэтому и приходится учитывать реальные взаимосвязи подсистем различной физической природы, входящих в состав рассматриваемой ЭМС. Взаимоотношение элементов в системе реализуется с помощью соответствующих внутренних связей. Устойчивый порядок внутренних пространственно-временных связей между элементами, определяющий функциональное назначение системы и ее взаимодействие с внешней средой, называют структурой системы. Изучение систем предполагает наличие их описания, т. е. модели, отражающей свойства системы и позволяющей предсказать ее поведение в определенных условиях. Описание систем целесообразно представлять с трех позиций: функциональной, морфологической и информационной. Функциональное представление связано с пониманием системы как совокупности функций (действий) для достижения определенной цели. При функциональном описании декомпозиция системы, т. е. ее разделение на подсистемы, осуществляется по функциональным признакам в соответствии с распределяемыми функциями системы. Таким образом, функциональное описание системы получается иерархичным, поскольку функции подсистем оказываются подчиненными функциональному назначению системы в целом. Например, при функциональном описании электродвигателя, функциональным назначением которого является преобразование электрической энергии в механическую, целесообразно выделить такие функциональные подсистемы, как электромагнитную, механическую, тепловую, информационную и установить связи между ними, а также связи системы с окружающей средой. Функциональное описание начинается с верхнего уровня иерархии, т. е. с анализа функционального назначения системы в целом и ее внешних взаимодействий. Затем функции можно детализировать и выявлять соответствующие им подсистемы. Параметры своими значениями характеризуют свойства или процессы функционирования системы. Внешние параметры — это параметры, посредством которых система взаимодействует с внешней средой. Внутренние параметры присущи подсистемам и элементам. Выходные параметры характеризуют правильность и эффективность функционирования системы или подсистемы. На каждом иерархическом уровне описания выходные параметры характеризуют свойства системы, а внутренние — свойства подсистем (элементов). При пере ходе к новому уровню описания системы внутренние параметры могут стать выходными и наоборот. Например, сопротивление обмотки якоря электрической машины — это внутренний параметр при описании системы электропривода, но этот же параметр может рассматриваться как внешний, при описании электрической машины как функционального элемента электропривода. Среди выходных параметров выделяют показатели эффективности (качества), представляющие собой количественные оценки степени соответствия системы ее целевому назначению. Показателями эффективности технических систем могут быть надежность, производительность (быстродействие), масса, объем, КПД, статическая и динамическая точность, стоимость, технологичность и т. п. Степень важности показателей эффективности определяется функциональным назначением системы, конкретными условиями ее производства и эксплуатации. В дальнейшем этим показателям будет уделено особое внимание. Морфологическое описание также иерархично и дает представление о строении (структуре) системы, составе ее элементов и связях между этими элементами. Уровень детализации описания выбирается таким, чтобы создать представление о необходимых свойствах системы. Изучение морфологии начинается с определения состава элементов системы. При этом в составе системы различают энергетические и информационные элементы в соответствии с выполняемыми основными функциями. Энергетические элементы, как явствует из их названия, предназначены для преобразования энергии в вид и форму, в которых она может быть использована другими элементами. Соответственно информационные элементы служат для приема, запоминания, преобразования и передачи информации. При этом расход энергии на реализацию перечисленных функций незначителен и не оказывает ощутимого влияния на общий баланс энергии в системе. Процесс преобразования энергии нуждается в информации, которая может быть сосредоточена в энергетических элементах, не требуя обновления, но может и обновляться, пополняться или изменяться за счет поступления информационных сигналов от других элементов системы или из окружающей среды. Например, в вентильном электродвигателе преобразование электрической энергии в механическую и тепловую осуществляется в электрической машине. Информация, необходимая для реализации этого процесса, сосредоточена в самой электрической машине, т. е. в энергетическом элементе. В вентильном (полупроводниковом) преобразователе этого двигателя также происходит преобразование электрической энергии постоянного тока в электрическую энергию переменного тока, протекающего в обмотках якоря электрической машины, и в тепловую энергию. Этот процесс осуществляется на основе как внутренней информации, обусловленной структурой вентильного преобразователя, так и информации, поступающей от других элементов: датчика положения ротора электрической машины, датчика тока, информационно-управляющей системы и внешних устройств управления. Морфологические свойства системы определяются прежде всего характером связей между элементами. Можно выделить энергетические и информационные связи между элементами, а эти связи подразделить на прямые, обратные и нейтральные. Прямые связи предназначены для передачи энергии или информации от одного элемента системы другому в соответствии с последовательностью выполняемых функций. При этом качество связи определяется ее пропускной способностью, искажениями информации и потерь энергии, надежностью. Обратные связи — это некоторое преобразование сигнала, поступающего от предыдущих элементов, и передача результата преобразования обратно, т. е. в направлении, противоположном функциональной последовательности, одному из предыдущих элементов системы. Обратные связи могут быть как положительными, усиливающими управляемый процесс, так и отрицательными, ослабляющими его. Принято различать гладкие — действующие во всем диапазоне изменения сигнала, и пороговые — включаемые при выходе управляемого процесса за допустимые пределы, обратные связи. Например, в широтно-импульсном регуляторе релейного типа положительная обратная связь действует только тогда, когда регулируемый процесс выходит за верхнюю или нижнюю границу, и способствует возникновению регенеративного процесса, в результате которого выходной параметр информационного элемента изменяется от одного крайнего значения до противоположного. Двусторонние обратные связи симметричны направлению изменения управляемого процесса, т. е. реагируют как на усиление, так и на ослабление сигналов. Обратные связи, реагирующие только на усиление или на ослабление сигналов, называют односторонними. Различные комбинации как положительных, так и отрицательных односторонних обратных связей применяются в тех случаях, когда необходима несимметричная реакция элемента на входное воздействие. По времени реакции обратные связи делятся на мгновенные, запаздывающие и опережающие. При этом термин «мгновенные обратные связи» применяется условно и означает, что запаздывание или опережение во времени, характеризующее реальные связи, можно не принимать во внимание из-за их малости. Совокупность рассмотренных обратных связей широко используется в технических системах для стимулирования одних процессов и подавления других. Большой интерес представляет поиск эффективных сочетаний различных обратных связей для обеспечения заданного качества функционирования различных технических систем. Нейтральные связи не являются функционально необходимыми в работе систем. Они непредсказуемы или случайны и нередко приводят к нежелательным последствиям. Например, при нерациональной организации коммутационных процессов в энергетических элементах системы могут возникать высокочастотные сигналы, которые при отсутствии специальных средств защиты информационных элементов и связей образуют нейтральные связи, нарушающие процесс обработки информации. Информационное описание должно давать представление об организации работы системы. При этом под информацией понимается содержание воздействий, их параметры и значения, изменения в пространстве и во времени, взятые в отрыве от энергетических свойств носителя информации. Процессы функционирования системы тесно связаны с процессами передачи, приема, обработки, хранения и отображения информации. Совокупность функционального, морфологического и информационного описаний позволяет отразить принципы подхода к изучению систем. Степень возможной детализации описания системы в значительной степени определяется задачами, решаемыми на конкретных этапам ее жизненного цикла. 1.2. Управление технической системой Любая ТС в определенных условиях характеризуется относительно стабильной организацией и явно выраженной целевой функцией, которая реализуется посредством целенаправленного воздействия на систему, т. е. с помощью управления. Соответственно управлением называют процесс организации целенаправленного воздействия на систему как объект управления, в результате которого система переходит в требуемое состояние. В общем виде схема управления объектом приведена на рисунке ниже.  В основе процесса управления лежит информация о состоянии среды Х, объекта Y и цели управления I. Для целенаправленного функционирования подсистемы управления необходим алгоритм управления в виде совокупности однозначно интерпретируемых правил реализации поставленной цели Z в данной ситуации. Информация I = <Хd, Yd> о состоянии среды и объекта поступает в подсистему управления через подсистемы датчиков Dx и Dу, которые можно назвать подсистемами сбора информации. При ограниченности ресурсов, обычно выделяемых на управление, информация I всегда является неполной, т. е. на объект может оказываться воздействие, не учитываемое подсистемой сбора информации. Поэтому на рисунке показано ненаблюдаемое возмущение Е, под которым подразумеваются все внешние и внутренние процессы, влияющие на состояние Y объекта, но не воспринимаемые подсистемами сбора информации в силу их функциональной неполноты. Располагая информацией I = <Хd, Yd> и алгоритмом управления для достижения цели I, подсистема управления вырабатывает воздействие U = φ(I, Z), которое реализуется исполнительными механизмами. В общем случае исполнительные механизмы выполняют команду U с некоторой задержкой и поэтому возможно U0 ≠ U, где U0 - состояние управляемого входа объекта. Это необходимо учитывать при разработке информационно-управляющей системы объекта, поскольку его состояние Y определяется тремя факторами, т. е. Y = F0(X, Е, U0), где F0 - оператор работы объекта управления. Здесь под информационно-управляющей системой объекта понимается совокупность средств реализации алгоритмов управления, включаемых в состав подсистем сбора информации и управления и объединяемых для достижения заданных целей управления. Таким образом, основными факторами, присущими любой системе управления, являются:
Важно отметить, что управление оказывается невозможным при исключении из этого перечня хотя бы одного фактора и оно считается качественным, если наиболее полное достижение поставленной цели обеспечивается в заданных условиях при наиболее эффективном распределении ограниченных ресурсов управления. Для достижения эффективного управления необходимо определить количественную оценку полноты достижения целей управления. Эту оценку принято называть критерием эффективности (качества) управления. Конкретные критерии эффективности выбираются в зависимости от характера решаемой задачи. 1.3. Определение и обобщенная схема электромеханической системы Все сказанное выше в полной мере справедливо и для ЭМС. Особенности ЭМС связаны с конкретным их назначением. С учетом ранее данного определения сложных технических систем можно рассматривать ЭМС как совокупность взаимодействующих элементов, осуществляющих электромеханическое преобразование энергии при заданном качестве этого преобразования. По функциональному признаку ЭМС разделяются на следующие группы: 1. Источники электропитания (генераторные установки), т. е. системы, преобразующие механическую энергию в электрическую. 2. Системы электропривода, в которых происходит преобразование электрической энергии в механическую энергию движения рабочих органов различных механизмов. 3. Двигатель-генераторные системы, осуществляющие преобразование электрической энергии в механическую и механической энергии в электрическую. При этом эти два преобразования могут производиться одновременно, как это делается в электромеханических источниках вторичного электропитания, в которых одна электрическая машина является приводным двигателем, а вторая — генератором, или поочередно, как в стартерах-генераторах. Следует отметить, что основное обратимое преобразование энергии механической в электрическую не исчерпывает всего многообразия преобразований энергии в ЭМС. Так, функциональными задачами этих систем могут быть преобразования электрической энергии одного вида в электрическую энергию другого вида соответственно механической энергии одного вида в механическую энергию другого вида, механической энергии в электрическую энергию особого вида и качества (например, получение электрического сигнала, пропорционального углу поворота или тригонометрическим функциям этого угла). В зависимости от назначения, условий работы и предъявляемых требований существует большое число различных видов и типов ЭМС, все многообразие которых можно представить некоторой обобщенной схемой. Одна такая схема позволяет реализовать как частный случай любую конкретную схему ЭМС, а в некоторых случаях и прогнозировать появление новых схем. Впервые идею о возможности представления множества различных ТС и устройств в виде обобщенных схем высказал В. Т. Морозовский, один из выдающихся отечественных ученых в области авиационной электротехники. На рисунке ниже представлен один из возможных вариантов обобщенной функциональной схемы ЭМС. Она представляет собой совокупность элементов, взаимодействие которых осуществляется с помощью коммутируемых связей, при этом ключи располагаются последовательно или параллельно элементам. Каждой совокупности состояний этих ключей соответствует конкретная схема ЭМС. Число сочетаний положений всех ключей характеризует множество возможных схем ЭМС. Основным элементом каждой схемы, естественно, является ЭМП, под которым будем понимать электрическую машину, работающую в двигательном или генераторном режиме. Возможность работы ЭМП в том или ином режиме на обобщенной схеме показана направлениями соответствующих стрелок, соединяющих элементы. К ЭМП должна подводиться механическая (генераторный режим) или электрическая (двигательный режим) энергия. Для последнего случая в обобщенной схеме предусмотрен источник электрической энергии (ИЭЭ) с возможностью подключения аккумулятора (накопителя) электрической энергии (АЭЭ), если ИЭЭ имеет ограничения по мощности и по времени работы. В генераторном режиме ЭМП требуется механическая энергия, для получения которой может быть использован любой другой вид энергии. На обобщенной схеме это показано в виде возможности подключения источника (ИЭ) и аккумулятора (АЭ) энергии через соответствующий преобразователь в механическую энергию (ПЭМ). В качестве источника энергии могут быть использованы, например движение воздуха, воды, взрыв, сжатые газы, механические пружины, горючие вещества и т. п. При работе ЭМП практически всегда требуется обеспечивать соответствующие уровень и качество подводимой к нему или отводимой от него электрической или механической энергии. Для этого в обобщенную схему вводятся преобразователь механического движения, скорости и момента (ПДСМ) и преобразователь электрической энергии (ПЭЗ). 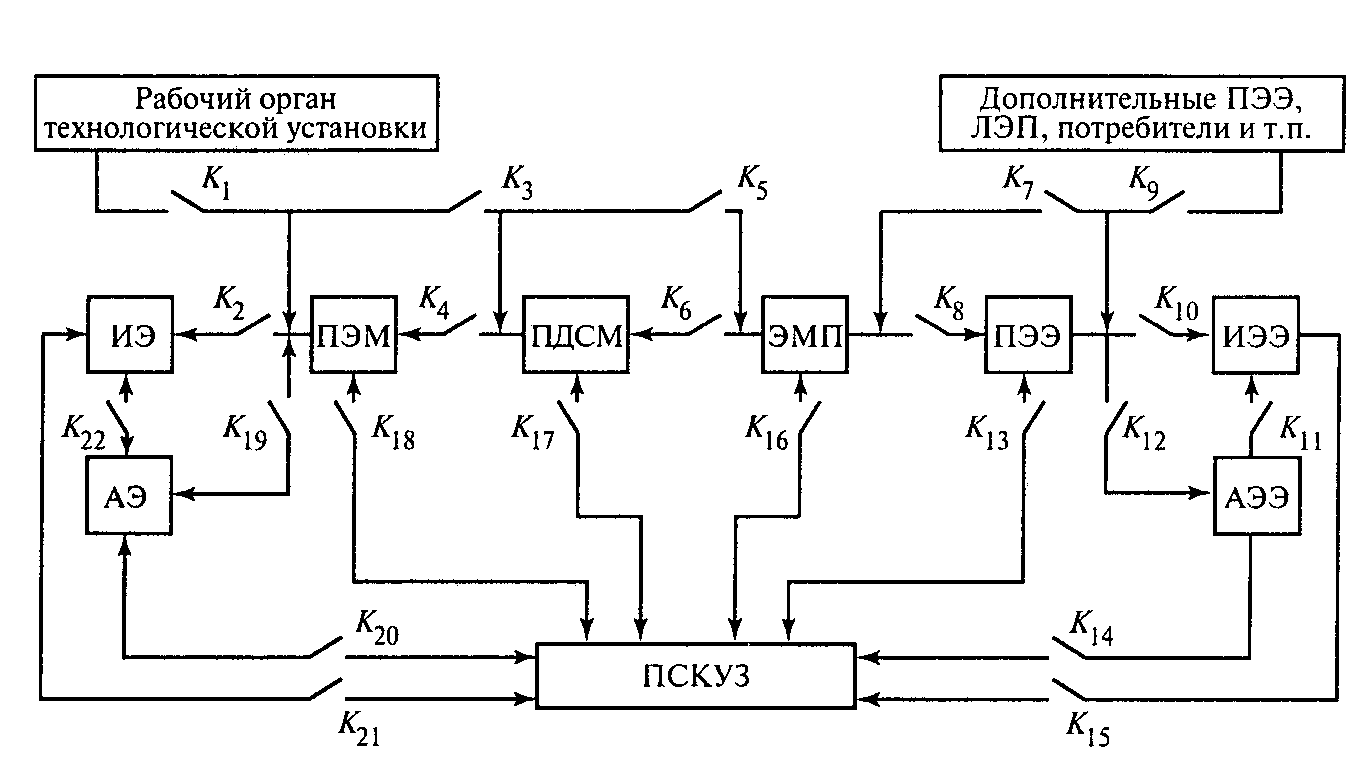 ЭМП – электромеханический преобразователь; ПЭЭ – преобразователь электрической энергии; ИЭЭ – источник электрической энергии; АЭЭ – аккумулятор электрической энергии; ПДСМ – преобразователь движения, скорости и момента; ПЭМ – преобразователь какой-либо энергии в механическую; ИЭ - источник энергии; АЭ – аккумулятор энергии; ПСКУЗ – подсистема контроля, управления и защиты; К1 – К22 – коммутирующие ключи. Обязательным атрибутом любой ЭМС является подсистема контроля, управления и защиты (ПСКУЗ), назначение которой — сбор информации о работе системы, ее элементов и параметрах окружающей среды. На основе этой информации вырабатываются управляющие сигналы, с помощью которых обеспечивается заданное качество функционирования системы, реализуется контроль за работой всех ее элементов и при необходимости осуществляется их защита. Эта подсистема включает в себя совокупность датчиков, задающих, сравнивающих и исполнительных устройств, а также средств индикации и защиты. В составе подсистемы могут находиться как простейшие релейные элементы, осуществляющие включение и отключение компонентов ЭМС, так и микроконтроллеры или управляющие ЭВМ, решающие задачи эффективного управления, контроля качества работы системы, диагностики и прогнозирования работоспособности ее компонентов. В конкретных ЭМС ряд элементов обобщенной схемы могут отсутствовать или функционально и конструктивно совмещаться с другими элементами. В соответствии с ранее рассмотренным способом морфологического описания технических систем в составе ЭМС можно выделить энергетические и информационные элементы (каналы), а также различные прямые и обратные связи, которые реализуются определенными коммутациями ключей. При этом в энергетический канал ЭМС входят все элементы обобщенной схемы за исключением подсистемы контроля, управления и защиты, которая соответственно выполняет функции информационно-управляющего канала. 1.4. Классификация электромеханических систем Разделение всей совокупности ЭМС на некоторые подмножества производится на основе определенных классификационных признаков. По функциональному признаку ЭМС были разделены на три группы:
По типу основного системообразующего элемента, в качестве которого естественно рассматривать ЭМП, различаются ЭМС, выполненные на базе электрических машин постоянного тока, синхронных и асинхронных электрических машин переменного тока, электрических машин двойного питания и пр. В свою очередь, по способу управления ЭМП можно разделить на одноканальные и двухканальные. К одноканальным ЭМП относятся электрические машины постоянного и переменного тока, магнитный поток возбуждения которых создается с помощью постоянных магнитов. Эти машины называются магнитоэлектрическими. К этому же классу относятся асинхронные электрические машины с короткозамкнутой обмоткой на роторе или не имеющие обмотки на роторе и гистерезисные машины. Регулирование магнитного потока в перечисленных ЭМП производится по основному (и единственному) каналу передачи энергии, что и определило их название. К двухканальным ЭМП относятся электрические машины, магнитный поток возбуждения которых можно регулировать посредством дополнительной подсистемы электромагнитного или смешанного типа, а также машины двойного питания, в которых поток возбуждения создается многофазной обмоткой, расположенной на статоре или роторе. По конструктивному признаку электрические машины разделяются на бесконтактные машины и машины с щеточными контактами. Одноканальные электрические машины, кроме машин постоянного тока, являются бесконтактными, а двухканальные могут быть выполнены как контактными, так и бесконтактными. Однако, бесконтактность в данном случае достигается за счет усложнения конструкции и ухудшения массогабаритных и функциональных показателей в динамических режимах работы. По роду тока ЭМС делятся на системы постоянного и переменного тока, а также системы смешанного типа. Системы переменного тока могут быть как однофазными, так и многофазными, в частности, трехфазными. К системам смешанного типа относятся электромеханические источники вторичного электропитания, преобразующие электрическую энергию тока одного рода в другой. Вентильные электромеханические системы характеризуются наличием и участием в процессе преобразования энергии как электромеханических, так и полупроводниковых (вентильных) преобразователей, использование которых обеспечивает ЭМС не только бесконтактность при более простой конструкции электрической машины, но и управляемость, т. е. возможность формирования заданных статических и динамических характеристик в различных режимах работы. Типичными представителями вентильных ЭМС являются вентильные генераторы и вентильные двигатели. Вентильным генератором (ВГ) называют электромеханическую систему, предназначенную для питания потребителей постоянным током, в котором переменное напряжение синхронного генератора преобразуется в постоянное с помощью полупроводникового выпрямителя. Вентильный генератор является аналогом коллекторного генератора постоянного тока, в котором преобразование напряжения происходит с помощью щеточно-коллекторного узла. Полупроводниковый выпрямитель ВГ таким образом обеспечивает бесконтактность, а при использовании управляемого выпрямителя появляется еще возможность и регулирования выходного напряжения (малоэкономичный способ). Вентильным двигателем (ВД) в самом общем случае можно назвать любой электропривод, в котором регулирование режима работы электродвигателя производится с помощью управляемых вентильных (полупроводниковых) преобразователей электроэнергии: выпрямителя, импульсного регулятора постоянного тока, преобразователя частоты. В более узком, общепринятом, смысле ВД называют ЭМС, включающую в себя ЭМП и инвертор, переключение ключей которого происходит в момент времени, согласованный с определенным положением ротора. В данном пособии под ВД будет пониматься ЭМС, отвечающая именно этому определению. Аналогом ВД является коллекторный двигатель постоянного тока. Функции отсутствующего механического коллектора в ВД выполняет полупроводниковый коммутатор (инвертор), а функцию щеток — датчик положения ротора. Инвертор в ВД обеспечивает бесконтактность, а при использовании широтно-импульсной коммутации ключей инвертора — еще и возможность управления преобразованием энергии. В источниках электроснабжения переменного тока при переменной частоте вращения первичного двигателя и необходимости стабилизировать частоту выходного напряжения возможно применять циклоконверторы, осуществляющие непосредственное преобразование электроэнергии переменного тока нестабильной частоты f1 = var в электроэнергию переменного тока стабильной частоты fвых = const. В источниках электроснабжения и электроприводах используются также комбинированные вентильные преобразователи, имеющие в своем составе управляемый или неуправляемый выпрямитель (звено постоянного тока) и инвертор. Для возврата энергии в источник питания комбинированный вентильный преобразователь должен состоять из реверсивного выпрямителя и реверсивного инвертора. По режиму работы ЭМС можно разделить на ЭМС длительного, кратковременного и повторно-кратковременного режима. Разделение на эти режимы производят исходя из теплового состояния ЭМС. Если система за время работы достигает установившейся температуры, то такой режим работы называется длительным; если за время работы установившаяся температура не достигается, а за время останова система успевает остыть до температуры окружающей среды, то такой режим называется кратковременным; и наконец, если за время работы температура не достигла установившегося значения, а за время останова не успела достигнуть температуры окружающей среды, то такой режим называется повторно-кратковременным. Также можно выделить нереверсивные и реверсивные ЭМС. В последнем случае имеется в виду не столько изменение направления вращения, характерное для ряда электроприводов, сколько реверс потока энергии во всех функционально различных ЭМС. По характеру нагрузки ЭМС подразделяются на ЭМС с постоянной, изменяющейся, импульсной и знакопеременной нагрузкой. При этом под нагрузкой источников электроснабжения и двигатель-генераторных систем, работающих в генераторном режиме, следует понимать суммарную мощность потребителей электрической энергии, а для электроприводов — момент нагрузки на выходном валу механизма или механическую мощность, потребляемую нагрузкой. Регулируемыми (стабилизируемыми) в процессе функционирования параметрами источников и двигатель-генераторных систем постоянного тока являются выходное напряжение Uвых, в системах переменного тока — выходное напряжение Uвых и его частота fвых, а в многофазных системах к этим параметрам добавляется и фазовый сдвиг Δφ между напряжениями. В электроприводах обычно регулированию подвергаются выходной момент, развиваемый электромеханизмом, угловая скорость Ω или положение выходного органа системы. 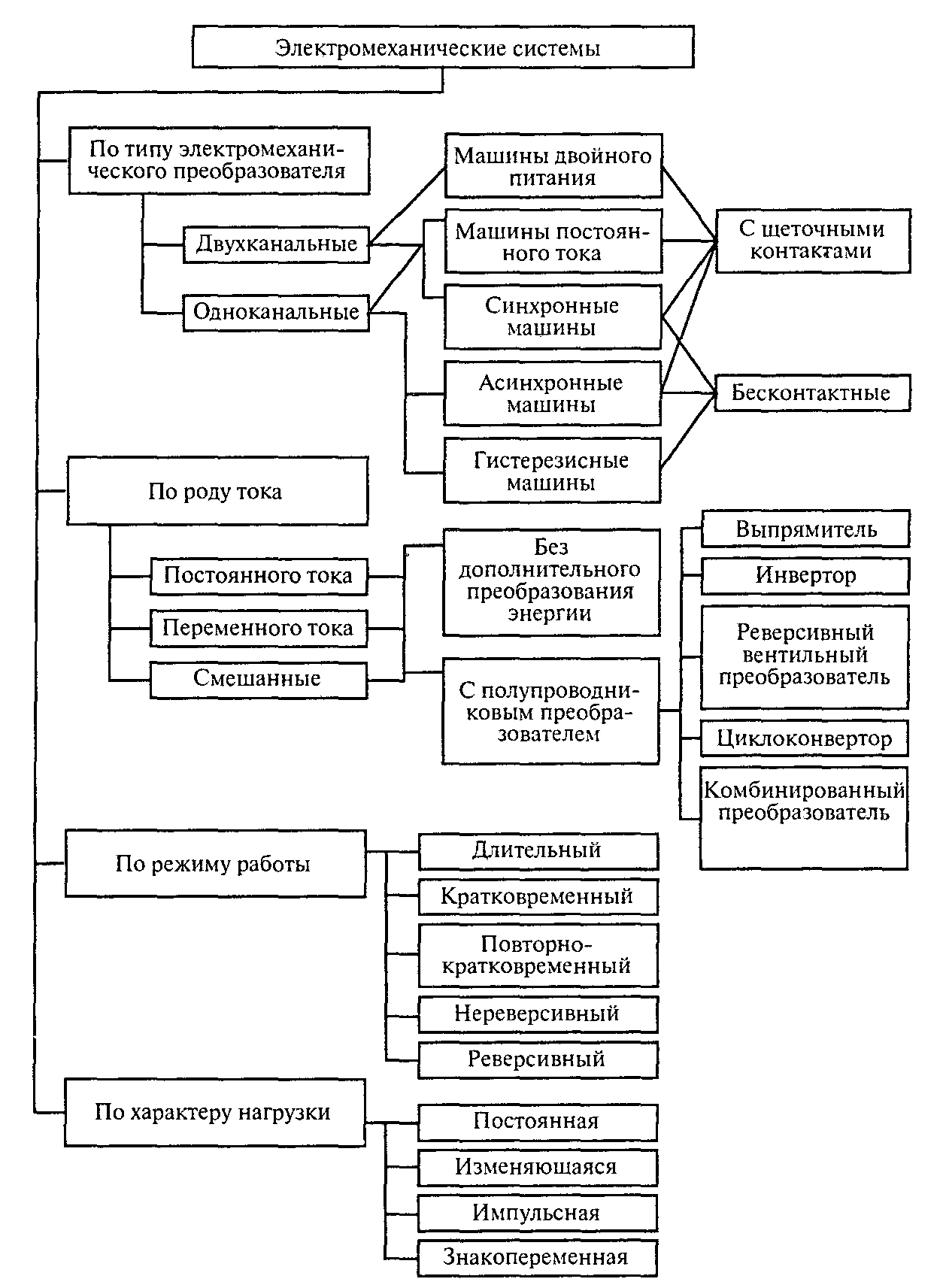 Классификация ЭМС с использованием вращающихся ЭМП Известно, что информационно-управляющая система и исполнительные механизмы ЭМС обладают инерционностью, поэтому если нагрузка изменяется медленно по сравнению со временем запаздывания процесса регулирования, то такую нагрузку называют - изменяющейся. Если же время, в течение которого происходит изменение нагрузки, оказывается существенно меньше времени запаздывания, то такую нагрузку называют импульсной. Если в процессе функционирования ЭМС изменяется направление потока энергии между системой и нагрузкой, то такую нагрузку называют знакопеременной или реверсивной. Особенности взаимодействия ЭМС с нагрузкой необходимо учитывать при создании ТС более высокого уровня иерархии — электротехнических или электроэнергетических комплексов. Рассмотренная выше классификация схематично представлена на рисунке выше. Она приведена для вращающихся электромеханических преобразователей. Аналогичную классификацию можно представить и для ЭМП других типов (линейных, вибрационных и т.п.) |