Лекция 7-21 Оценкак качества системы. Лекция Оценка качества системы
 Скачать 198 Kb. Скачать 198 Kb.
|

Лекция 7. Оценка качества системыОсновные показатели качества переходного процесса в системе РА мы рассмотрели на предыдущей лекции. К ним относятся следующие основные показатели: длительность переходного процесса tп, время с момента подачи сигнала до момента, когда выходной сигнал будет отличаться от его установившего значения не более чем на 5 %; перерегулированиеразность между максимальным значением выходного сигнала в переходном процессе и установившемся значением; время нарастания переходной характеристики характеризует максимальную скорость переходного процесса; колебательность переходного процесса, характеризует скорость уменьшения выбросов на ПХ. Качество системы РА можно также оценить по частотным характеристикам. 7.1 Оценка качества системы по частотным характеристикамЧастотные показатели качества работы систем РА определяются по форме АЧХ замкнутой системы, типовая форма которой приведена на рис. 7.1. АЧХ систем нормируются относительно значения АЧХ на частоте равной нулю, т.е. ее начальное значение равно единице.  Рис. 7.1 Нормированная АЧХ замкнутой системы РА К частотным показателям качества работы систем РА относятся следующие параметры: полоса пропускания п – диапазон частот, в котором АЧХ больше или равна единице. Если АЧХ замкнутой системы РА монотонная, во всем диапазоне частот меньше единицы, то полоса отсчитывается по уровню 0.7; резонансная частота р – частота, соответствующая максимуму АЧХ замкнутой системы. Эта частота соответствует частоте колебаний в переходном процессе; показатель колебательности М – максимальное значение АЧХ замкнутой системы. Показатель соответствует колебательности переходного процесса системы и связан с добротностью. В качественной системе этот показатель не должен превышать двух единиц, колебания в качественной системе должны быстро затухать. Частотные показатели замкнутой и разомкнутой систем связаны соотношением где Поэтому оценить качество замкнутой системы, удобно по ЛАЧХ разомкнутой системы, показанной на рис .7.2. В соответствии с критерием Найквиста, запас устойчивости, который связан с колебательностью АЧХ замкнутой системы, можно определить по частоте, на которой обратная связь превращается из отрицательной в положительную. 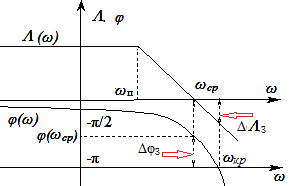 Рис. 7.2 ЛАЧХ разомкнутой системы РА Системы с отрицательной ОС имеют фазовый сдвиг на нулевой частоте, равный 180ᶿ или π радиан. С ростом частоты фазовый сдвиг увеличивается из-за необходимых для устойчивости апериодических звеньев. При дополнительном сдвиге еще на 180ᶿ обратная связь из комплексной превращается в положительную, и при коэффициенте усиления более 1 система теряет устойчивость. Запас устойчивости системы по фазе определяется на частоте среза, ωСР на которой коэффициент передачи равен 0дБ=1, ΔφЗ=-π-φ(ωСР). Запас устойчивости системы по коэффициенту усиления определяется на критической частоте, ωКР на которой дополнительный фазовый сдвиг составит 180ᶿ, рис. 7.2. Этот запас показывает, насколько можно увеличить усиление до достижения значения К=1. Полоса пропускания и частота среза связаны соотношением  , рис. 7.2. , рис. 7.2.Отсюда по вещественной части определяется фазовый сдвиг при переходе от верхней частоты к частоте среза Колебательность системы связана с запасом устойчивости по фазе выражением 7.2 Оценка качества системы по временным характеристикам7.2.1 Точность работы систем радиоавтоматики Системы РА подразделяются на статические и астатические. В статических системах ошибка в установившемся режиме не равна нулю, а в астатических (т.е. содержащих интеграторы), равна нулю (рис. 7.3).  Рис. 8.3. Временная зависимость ошибки статической (1) и астатической (2) систем Передаточная функция астатической системы относительно сигнала имеет вид Из выражения (8.1) следует, что статическая ошибка равна нулю, если передаточная функция ошибки содержит множитель p (имеет нуль в точке p =0), в противном случае статическая ошибка не равна нулю. Для астатической системы относительно других видов сигнала передаточная функция ошибки для системы с астатизмом порядка содержит множитель p (имеет нуль порядка в точке p =0). В такой системе ошибка в установившемся режиме равна нулю при входном сигнале Помимо статических ошибок, которые были рассмотрены выше, точность работы систем РА характеризуется динамическими, а также переходными и среднеквадратическими ошибками (рис. 7.4).  Рис. 7.4. Временная зависимость динамической и переходной ошибок систем РА, х – входное воздействие, y – выходная реакция Динамическая ошибка – ошибка в установившемся режиме работы системы при действии на нее нестационарного сигнала. Переходная ошибка – ошибка при работе системы в переходном процессе, который возникает при отработке начального рассогласования. Динамическая точность работы систем РА определяется при медленно изменяющихся входных сигналах (воздействия, число производных от которых ограничено). Гармонический сигнал не является медленно изменяющимся, так как число производных от него равно бесконечности. Переходные процессы в системах РА затухают значительно быстрее по сравнению с изменением медленно изменяющегося сигнала, поэтому и достигается установившийся динамический режим работы системы. 8.2.2. Оценка ошибок системы по временным характеристикам Как показано в лекции 1, непрерывная дифференцируемая функция y=f(x), может быть представлена в виде бесконечного ряда Тейлора [1]: Выражение прадставляет собой разложение функции в точке xi на сумму производных с нормирующими коэффициентами. В соответствии с определением передаточной функции ошибки преобразование Лапласа для ошибки системы может быть аппроксимирована рядом Тейлора на комплексной плоскости, представленного в виде или в области оригинала функции  . .Число слагаемых в последнем выражении ограничено, так как сигнал x(t) является медленно изменяющимся воздействием. Для нахождения неизвестных коэффициентов ошибки Ci, передаточную функцию ошибки представим в типовом виде  . .Связь между коэффициентами ошибок и коэффициентами полинома нйдем подстановкой (7.2), получим  Приравняв коэффициенты при одинаковых степенях p слева и справа, определим формулы для последовательного вычисления коэффициентов ошибок, связывающие коэффициенты при степенях ПФ с ошибками системы. Обычно при анализе точности ограничиваются тремя первыми коэффициентами ошибок: по положению С0, по скорости С1, ускорению С2. В результате найдем, что Из выражения следует, что коэффициенты ошибок имеют размерность коэффициентов Ci. В инженерных расчетах коэффициенты ошибок удобнее рассчитывать через коэффициенты передаточной функции разомкнутой системы:  (7.3) (7.3)В таблице 7.1 приведены формулы для расчета первых трех коэффициентов ошибок систем РА с разным астатизмом ν по параметрам передаточной функции (8.3). Таблица 7.1 Формулы расчета первых трех коэффициентов ошибок систем радиоавтоматики
Из анализа особенности передаточных функций астатических систем РА следует, что в таких системах первых коэффициентов ошибок равны нулю, где – порядок астатизма системы РА. При анализе качества работы систем РА, кроме вычисления ошибок при медленно изменяющихся сигналах, необходимо оценивать точность и при гармонических воздействиях. Поскольку число производных от гармонического сигнала не ограничено, для расчета ошибок необходимо использовать частотные характеристики. По АЧХ ошибки вычисляется амплитуда колебаний ошибки, а по ФЧХ – сдвиг колебаний ошибки относительно входного сигнала. Пример. Рис. 8.4. Найти динамическую ошибку следящей системы при входном сигнале  . .Решение. Коэффициенты ошибок вычисляются по формулам таблицы 7.1: Статическая ошибка системы отсутствует из-за присутствия интегратора, зависимость динамической ошибки системы от времени в соответствии с выражением (7.2) описывается выражением: Из анализа полученного выражения следует, что: при увеличении коэффициента усиления системы и увеличении постоянной времени форсирующего звена ошибка уменьшается, увеличение постоянных времени инерционных звеньев увеличивает динамическую ошибку системы. 7.3 Постановка задачи синтеза системы РА с заданными характеристикамиПри синтезе систем РА предполагается, что по известным характеристикам управляющих и возмущающих воздействий определены допустимые значения ошибок по положению, скорости, ускорению, ширине полосы пропускания, допустимая колебательность системы. Требования к указанным ошибкам формулируются в виде следующих неравенств:  , ,где На первом этапе задача синтеза систем РА состоит в нахождении желаемой передаточной функции разомкнутой системы, которая удовлетворяет заданным требованиям по ошибкам проектируемой системы РА. Желаемую передаточную функцию разомкнутой системы следует формировать в наболее простом виде, удовлетворяющем заданным ошибкам. Задача сводится к определению параметров желаемой передаточной функции: , К, Т1, Т2 , T3 и т.д. На втором этапе задача синтеза систем РА состоит в определении исходной ПФ системы, включающей необходимые устройства с известными ПХ. На третьем этапе определяются виды корректирующих обратных связей, корректирующих звеньев, включением которых производиться изменение исходной ПФ на желаемую ПФ. |
