Основные определения воздушной навигации. Лекция Основные определения Воздушная навигация
 Скачать 77.41 Kb. Скачать 77.41 Kb.
|

|
Лекция 1. Основные определения 1.1. Воздушная навигация — комплекс действий экипажа, направленных на достижение наибольшей точности, надежности и безопасности вождения летательного аппарата (ЛА) или группы по заданной траектории, а также в целях вывода их по месту и времени на заданные объекты (цели) и аэродромы посадки. Траектория полета — линия, описываемая центром масс ЛА в процессе его движения в воздушном пространстве. Линия пути (ЛП)— проекция траектории полета ЛА на земную поверхность. Фактической траектории полета соответствует линия фактического пути (ЛФП), заданной траектории — линия заданного пути (ЛЗП). Профиль полета — проекция траектории движения ЛА на вертикальную плоскость. Местоположение самолета (МС) — проекция его центра масс на земную поверхность к определенному моменту времени. 1.2. Навигационные элементы полета — параметры, характеризующие положение и движение ЛА. Они включают координаты места ЛА, высоту полета, воздушную скорость, курс самолета, скорость ветра, направление ветра, угол ветра, курсовой угол ветра, путевую скорость, путевой угол, угол сноса. Высота полета (Н) — расстояние по вертикали от начального уровня ее отсчета до ЛА. По начальному уровню различают истинную, относительную, абсолютную высоты и высоту эшелона (рис. 1.1). Истинная высота (Нист) — высота полета над точкой земной (водной) поверхности, находящейся под ЛА. Относительная высота (Нотн) — высота полета над условно выбранным уровнем (уровнем аэродрома, цели и др.). Абсолютная высота (Набс) — высота полета над уровнем моря. Высота эшелона (Нэш) — высота, отсчитываемая от уровня, который соответствует атмосферному давлению 760 мм рт.ст., в предположении, что распределение температуры с высотой соответствует стандартным условиям. 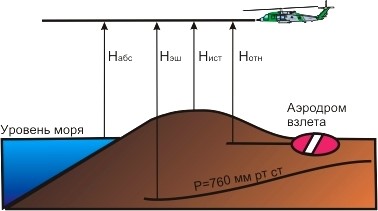 Рис. 1.1. Классификация высот полета по уровню начала отсчета Воздушная скорость (V) — скорость перемещения ЛА относительно воздушной среды. Истинная воздушная скорость (Vист) — это фактическая скорость, с которой ЛА движется относительно воздушной среды. Скорость по прибору (Vпр) — скорость, которую показывает прибор, измеряющий воздушную скорость. Курс ЛА (К) — угол в горизонтальной плоскости между выбранным опорным направлением и проекцией на эту плоскость продольной оси ЛА. Для отсчета курсов используются следующие опорные направления (рис. 1.2): истинный (геодезический) меридиан Си; магнитный меридиан См; ортодромический меридиан X в левой ортодромической системе координат или ортодромическая параллель Y в правой ортодромической системе координат; условный меридиан Су — любое произвольное (условное) направление для измерения курса с помощью гироскопических курсовых приборов.  Рис. 1.2. Опорные направления для отсчета курсов Если опорным направлением является северное направление истинного меридиана, курс ЛА называют истинным (ИК). Если в качестве опорного направления выбран магнитный меридиан, курс ЛА называют магнитным (МК). Если опорное направление определяется с помощью гироскопических курсовых приборов, курс называют условным (УК). Если опорным направлением является ортодромический меридиан или ортодромическая параллель, курс называют ортодромическим (ОК). Для перехода от одной системы отсчета курса к другой используют следующие угловые поправки: магнитное склонение (ΔM) — угол, заключенный между истинным и магнитным меридианами; азимутальную поправку (ΔА) — угол, заключенный между условным и истинным меридианами; условное магнитное склонение (ΔМу) — угол, заключенный между условным и магнитным меридианами; угол сходимости Δ (угол карты βк) — угол, заключенный между истинным и ортодромическим меридианами левой ортодромической системы координат или ортодромической параллелью правой ортодромической системы координат соответственно. Угловые поправки ΔM, ΔА, ΔМу отсчитываются от 0 до 180º по ходу часовой стрелки со знаком «плюс», против хода часовой стрелки — со знаком «минус». Угол сходимости Δ (угол карты βк) отсчитывается по ходу часовой стрелки от 0 до 360º. Скорость ветра (U) — скорость горизонтального перемещения воздушных масс относительно земной поверхности. Направление ветра (δ) — угол в горизонтальной плоскости, заключенный между тем же опорным направлением, от которого измеряется курс, и вектором ветра. Угол ветра (УВ) — угол, заключенный между вектором путевой скорости и вектором ветра. Курсовой угол ветра (КУВ) — угол, заключенный между вектором воздушной скорости и вектором ветра. Путевая скорость (W) — скорость перемещения ЛА относительно земной поверхности. Расчетная путевая скорость (Wp) — скорость ЛА, определенная по известному ветру. Фактическая путевая скорость (Wф) — это текущее значение путевой скорости. Путевой угол (ПУ) — угол в горизонтальной плоскости между выбранным направлением отсчета курса и вектором путевой скорости. Угол сноса (УС) — угол, заключенный между векторами воздушной и путевой скорости. Навигационный параметр — это измеряемая в полете или на земле некоторая величина, определенным образом зависящая от координат ЛА. 1.3. Линия положения — геометрическое место точек вероятного местоположения ЛА, характеризующаяся постоянством измеренного навигационного параметра. Линия равных расстояний (ЛРР) — линия положения, в каждой точке которой дальность от ЛА до фиксированной точки на земной поверхности есть величина постоянная. Линия равных азимутов (пеленгов) (ЛРА)— линия положения, характеризуемая постоянством измеренного азимута (пеленга). Линия равных разностей расстояний (ЛРРР) — линия положения, в каждой точке которой разность расстояний от ЛА до двух фиксированных точек на земной поверхности есть величина постоянная. 1.4. Автоматизированные системы навигации позволяют более полно реализовать боевые возможности ЛА. К таким заказам относятся навигационные системы (комплексы) и прицельно-навигационные системы (комплексы). Навигационная система (комплекс) — совокупность функционально связанных бортовых средств и систем, обеспечивающих автоматизированный полет ЛА по заданной программе. Прицельно-навигационная система (комплекс) (ПНС) — совокупность функционально связанных бортовых средств и систем, обеспечивающих автоматизированный полет и боевое применение средств поражения ЛА по заданной программе. 1.5. Воздушная навигация осуществляется на всех этапах полета. При этом должны соблюдаться следующие ее основные правила: достижение высокой точности, надежности и безопасности вождения ЛА (групп) по заданной траектории; обеспечение надежного вывода ЛА (групп) на заданные цели (аэродромы посадки) в различных условиях тактической обстановки; строгое выдерживание программы и штурманского плана полета; непрерывный и надежный контроль за работоспособностью комплекса (системы), своевременная коррекция координат места ЛА; готовность летчика (экипажа) в любой момент времени перейти на неавтоматизированную навигацию; постоянная оценка условий выполнения полета и своевременное внесение изменений в программу полета; умелое сочетание автоматизированного и автономного полета при боевом маневрировании; постоянная готовность к перенацеливанию, целеуказанию и выходу на цели в усложнившейся обстановке; обеспечение качественного решения основных навигационных задач при полете с не полностью подготовленной программой. 1.6. Под обеспечением безопасности воздушной навигации понимается создание условий полета, исключающих: столкновение и опасное сближение самолетов в воздухе; столкновение ЛА с земной (водной) поверхностью и препятствиями на ней; вынужденные посадки ЛА из-за полной выработки топлива; – непредусмотренный вход в запретную зону (приграничную полосу); – потерю ориентировки в полете. Расчеты по обеспечению безопасности воздушной навигации носят вероятностный характер. Исходными данными для выполнения расчетов являются статистические характеристики точности навигации, а именно математические ожидания и средние квадратические отклонения ошибок выдерживания ЛЗП, времени выхода в заданные точки, выдерживания заданной высоты (эшелона) полета. Указанные выше характеристики используются для расчета предельных ошибок выдерживания ЛЗП (ширины полосы маршрута), предельных ошибок времени выхода в заданные точки, предельных ошибок выдерживания заданной высоты (эшелона) полета, на основании которых осуществляется выбор взаимного положения траекторий полета и ЛА в воздушном пространстве. Под шириной полосы маршрута понимается симметричная относительно ЛЗП полоса, за пределы которой ЛА с заданной гарантийной вероятностью Ро не выйдет за все время полета на этапе (этапах) маршрута. Ширина полосы маршрута характеризуется удалением ее границ от ЛЗП на расстояние ±С, км. Предельные ошибки во времени выхода в заданные точки — это возможное отклонение фактического времени выхода в заданные точки (на рубеж) от расчетного для соответствующей гарантийной вероятности. Для исключения случаев столкновений ЛА с земной или водной поверхностью и препятствиями на них полеты должны планироваться и выполняться на высотах не менее безопасных. Полеты на высотах менее безопасных запрещаются. Безопасная высота полета — это минимальная высота, гарантирующая ЛА от столкновения его с земной (водной) поверхностью и расположенными на ней препятствиями. В зависимости от уровня, принятого за начало отсчета, безопасная высота может быть истинной, относительной и абсолютной. Основными правилами полетов в воздушном пространстве РФ, КБП и инструкциями (руководствами) по летной эксплуатации ЛА определены истинные безопасные высоты для полетов в районе аэродрома, по кругу, по маршруту ниже нижнего эшелона и при расчете минимального безопасного эшелона. Истинной безопасной высотой полета называется минимальная заданная высота относительно пролетаемой местности и искусственных препятствий, гарантирующая ЛА от столкновений его с земной (водной) поверхностью или препятствиями на ней. 1.10. Исключение случаев попадания в запретные и опасные зоны достигается установлением минимально допустимого удаления маршрута от границ зоны, исключающего с заданной гарантийной вероятностью попадание ЛА в пределы запретных (опасных) зон. 1.11. Ориентировка считается потерянной, если экипаж ЛА не знает своего местонахождения и не может определить его с точностью, необходимой для продолжения дальнейшего полета в целях выполнения поставленной задачи. ОСНОВНЫЕ ЗАДАЧИ ВОЗДУШНОЙ НАВИГАЦИИ1.12. Основой навигации является принцип комплексного применения технических средств, который предусматривает: непрерывное определение места ЛА счислением пути; периодическую коррекцию счисленных координат ЛА с помощью технических средств и визуальной ориентировки; оценку показаний различных средств, используемых для счисления и коррекции места ЛА, и выбор для решения этих задач тех средств и способов, которые в данных условиях обеспечивают наибольшую точность и надежность навигации; вычисление параметров для полета по заданной траектории на основе обобщенной и оптимально обработанной информации о местоположении ЛА. Процесс воздушной навигации включает следующие типы операций: управление датчиками навигационной информации и навигационными устройствами (включение, настройка, измерение навигационных элементов полета и параметров); решение логических задач (оценка и выбор средств и способов счисления, и коррекции места ЛА, опознавание ориентиров, расшифровка изображения на экранах различных визиров, оценка и уточнение программы полета и видов маневра); решение вычислительных задач (счисление координат, вычисление координат по измеренным параметрам, определение ветра, вычисление параметров для выполнения полета по заданной траектории). 1.13. Навигация осуществляется экипажем (летчиком) путем решения на земле при подготовке к полету и в полете ряда задач. Основными задачами, решаемыми на земле, являются: выбор маршрута и профиля полета, расчет полета, прокладка маршрута на полетной карте; подготовка полетной карты, включающая построение сетки ортодромической системы координат; отметка превышений местности, наземных станций радионавигационных систем и ориентиров коррекции; нанесение необходимых условных знаков, характеризующих тактическую обстановку; склейка карт для автоматического планшета; выбор и подготовка микрофильмов для навигационных индикаторов и индикаторов навигационно-тактической обстановки; подготовка и расчет исходных данных для разработки программы полета, составление программы, программирование полета. В полете экипажем решаются следующие основные навигационные задачи: измерение навигационных параметров и элементов полета; счисление пути; коррекция результатов счисления пути и курса; определение условий перехода на очередной этап маршрута полета; определение управляющих параметров, обеспечивающих движение ЛА по заданной траектории и выход в заданные точки траектории в назначенное время; расчет параметров, определяющих положение ЛА относительно других ЛА в боевом порядке и обеспечивающих сохранение заданного места в боевом порядке (задача межсамолетной навигации); разработка и ввод в полете параметров новой траектории полета (перенацеливание); обеспечение предпосадочного маневрирования в соответствии с принятой в ПНС схемой. |