ДР 2 Марченко Е.М ЭН390006. Марченко Е. М эн390006
 Скачать 42.67 Kb. Скачать 42.67 Kb.
|

|
Марченко Е.М ЭН-390006 1) б,в. При расчёте двигателя на допустимы нагрев можно пользоваться методом эквивалентного момента. Суть этого метода в том, что момент двигателя пропорционален току который греет двигатель и эквивалентный момент показывает постоянный момент нагрузки который вызывает такой же нагрев двигателя, что и при постоянно меняющемся моменте. И Условие правильности выбора двигателя Мэ≤Мн. При расчёте двигателя на допустимы нагрев можно пользоваться методом эквивалентной мощности. Суть которого токая же как и у метода эквивалентного момента. С условием Рэ≤Рн. 2) Перегрузочная способность определяется критическим моментом который может выдать двигатель на валу и рассчитывается по формуле  Перегрузочная способность не имеет размерности. 3) б.  4) Компенсационная обмотка служит для компенсации поперечной реакции тяги. Путём более равномерного распределения магнитного потока по главным полюсам. Также компенсационные обмотки позволяют уменьшить воздушный зазор и снизить потоки рассеивания. 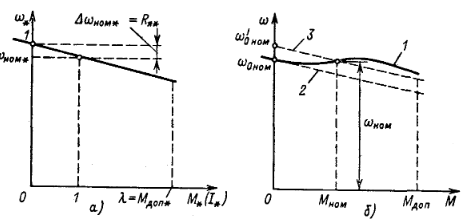 Механическая характеристики компенсированных (а) Механическая характеристики компенсированных некомпенсированных (б) Как видно из диаграмм благодаря компенсационной обмотке механическая характеристика становится более жёсткой. 5) Жесткость механической характеристики определяется по формуле  Из него следует что в I квадранте М и ω положительны и двигатель работает в двигательном режиме. Во II квадранте М имеет отрицательный знак, ω положительный следовательно жёсткость отрицательный и двигатель работает в генераторном режиме. В III квадранте M и ω имеют отрицательный знак поэтому жёсткость положительна и двигатель вращается в другую сторону. В IV квадранте M положительна, а ω отрицательна отсюда следует что двигатель находится в режиме торможения противовключения. 6) Rдт вводится из-за того что в режиме динамического торможения питание убирается только с цепи якоря. И при его вращении в магнитном поле статора на нём генерируется ЭДС и если не ввести дополнительное сопротивление в цепь якоря он может перегореть так как в нём появится ток равный  . .7) Этого нельзя допускать из-за того что на ХХ M близок к нулю и ДПТ с последовательным возбуждениям не контролируемо повышает частоту вращения. А это может стать причиной выхода из строя подшипников, или под действием центробежных сил из пазов якоря может выдавить обмотки. 8) Перегрузочная способность двигателей с последовательным возбуждением выше, чем в двигателях с независимым возбуждением, так как при одинаковой перегрузке двигатель с последовательным возбуждением потребляет меньший ток и, следовательно, меньше перегревается, чем двигатель с независимым возбуждением. 9) Механическая характеристика ДПТ с последовательным возбуждениям имеет гиперболический вид это означает что он не может работать в режиме генераторного торможения. Поэтому единственный тормозной режим на данном двигателе это торможение противовключене. 10) Основное отличие Г-образной схемы от Т-образной. Это то что в ней намагничивающий контур вынесен к выводам сети. Основная ошибка при переходе к Г-образной схеме заключается в том что при током переходе предполагается что отношение потерь в статора и потерь в стали близки к нулю из-за этого появляется ошибка в расчёте токов равная 3-5%. 11) Основное различие между АД с коротко замкнутым ротором и АД с фазным ротором это возможность изменять жёсткость механической характеристики меняя сопротивление подключённого к обмоткам якоря то есть при тех же значениях момента более низкие обороты. При этом сохраняется значение критического момента, а пусковой момент увеличивается в плоть до значений критического. 12) Упрощённая формула Клосса:  основной недостаток этой формулы это то что при её использовании приходится пренебрегать изменением значений схемы замещения. основной недостаток этой формулы это то что при её использовании приходится пренебрегать изменением значений схемы замещения.13) Их различия объясняются тем что при пуске двигателя частота тока в роторе большая и индуктивное сопротивление много больше активного и ток пуска больше в 5-7 раз номинального. А после разгона частота тока в якоре падает и вслед за ним индуктивное сопротивление. Что приводит к снижению тока якоря и практически полное совпадения с механической характеристикой. 14) Это связо с тем что при пуске АД в роторе наводится ЭДС с большо частотой. Из за чего индуктивное сопротивление в нём много больше активного и при разгоне частота уменьшается как и индуктивное сопротивление. Вместе с уменьшением индуктивности уменьшается и индуктивная связь с статором из-за этого сдвиг фаз между напряжением и током в обмотках статора также уменьшается, что крайне сложно вывести аналитически. 15) Если постепенно повышать нагрузку двигателя, то скольжение будет расти, при этом пропорционально скольжению будет расти ток, наводимый в роторе. При росте тока растут и активные потери. Их и называют потери скольжения. |