Методические указания пилотирования Пионером. Методические материалы для обучения пилотированию на умк Pioneer
 Скачать 1.28 Mb. Скачать 1.28 Mb.
|

 2022  Методические материалы для обучения пилотированию на УМК «Pioneer». Визуальное пилотирование. Пилотирование с системой fpv Отдел образовательных проектов «Геоскан» ОглавлениеВведение 2 Базовые процедуры 4 Предполетная подготовка коптера в помещении 6 Подготовка зоны полётов 8 Обеспечение безопасности во время полёта 10 Теория FPV-пилотирования 12 Устройство системы FPV 14 Бортовые видеокамеры 14 Системы передачи и приема видеосигнала 16 Безопасность при FPV-пилотировании 17 Пилотирование в симуляторе. 18 Практические упражнения пилотирования 20 ВведениеНастоящий раздел методического пособия содержит основную информацию о двух основных режимах ручного управления квадрокоптером визуальном и FPV. Поможет приобрести базовые навыки и знания, необходимые для первого полета. Визуальное пилотирование УМК «Пионер» пилотируется с помощью пульта дистанционное управления (ДУ). Стоит сразу ответить, что во всех моделях органы управления практически идентичны. Пульт ДУ делится на две части: левый и правый стики управления. Эти стики отвечают за управление перемещением квадрокоптера в пространстве. 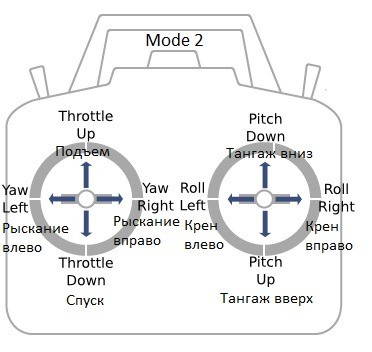 Рисунок 1(Рисунок 192 - Схема дистанционного пульта управления). С помощью левого стика регулируется высота полета и вращение квадрокоптера вокруг оси. Правый стик позволяет контролировать крен и тангаж для определения направления полета и управления наклоном. Органы управления Квадрокоптер в пространстве перемещается по трем осям: тангаж (Pitch), крен (Roll), рыскание (Yaw). На каждую ось — свой канал в пульте управления, плюс отдельный канал на газ (Throttle). Итого 4 канала управления коптером. Базовые процедурыArm (англ. – «вооружить») – режим активации моторов коптера. После активации моторов их рабочее состояние соответствует минимальным значениям. Этот режим является опасным, так как коптер реагирует на движение стиков и полностью готов к взлету. Активировать режим необходимо непосредственно перед, взлетов, когда будет совершенна предполетная проверка всех систем и соблюдена техника безопасности перед полетом. На УМК «Пионер» команда «Arm» выполняется наклоном стика «Yaw» вправо вниз, в течении 3 секунд. Disarm (англ. – «разоружить») – режим деактивации (отключение) моторов коптера. После деактивации моторов их рабочее состоянии соответствует нулевым значениям, регуляторы оборотов находятся в режим ожидании и питание на моторы не подается. Коптер не реагирует на движение стиков управления. На коптере УМК «Пионер» команда «Disarm» выполняется наклоном стика «Yaw» влево вниз, в течении 3 секунд. Процедура включения – последовательность действий после установки коптера на взлетную площадку перед взлётом. Включение квадрокоптера на взлётной площадке: Пульт управления – включить; Заряд батареек пульта – проверить, при необходимости заменить; Li-Po аккумулятор на борту коптера – подключить; Arm – выполнить. (стик YAW право вниз на 3 секунды); Газ – включить на 10%; Процедура выключения – последовательность действий после посадки или крушения коптера. Выключение квадрокоптера и завершение полета: Газ – перевести в минимум; Disarm – выполнить. (стик YAW влево вниз на 3 секунды); Газ – включить на 10% для проверки, что disarm прошел успешно; Li-Po аккумулятор на борту коптера – отключить; Пульт управления – выключить. Предполетная подготовка коптера в помещенииПеред каждым полетом ответственно выполняйте все проверки. Формальное и безответственное выполнение проверок приводит к разрушению или потере коптера и серьезным травмам. Перед каждым взлетом, даже если не было аварий необходимо проверять: 1. Пропеллеры – проверить правильность установки и что вращению ничего не мешает, при необходимости – устранить помехи. Осмотреть на наличие повреждений, и убедиться в отсутствии зазубрин, вмятин, трещин, при необходимости – произвести замену пропеллеров, имеющих повреждения. Убедиться в затянутости гаек пропеллеров. 2. Рама и элементы защиты – убедиться в отсутствии повреждений и проверить затянутость всех винтов. При необходимости – произвести замену или ремонт поврежденных элементов рамы или защиты. 3. Аккумуляторы – убедиться в отсутствии механических повреждений защитной пленки, вздутий и характерного запаха химической реакции. При появлении малейших подозрений на повреждения, не используйте аккумулятор, и замените на исправный. 4. Полезная нагрузка – в случае использования полезной нагрузки необходимо убедиться в надежности установки и ее фиксации (камера, модуль захвата груза), а также отсутствии повреждений. 5. Провода – убедиться в отсутствии выпирающих и незакрепленных проводов, при необходимости зафиксировать и визуально убедиться в том, что пропеллеры не будут их касаться. Важно: невыполнение данных условий может вызвать вибрацию, потерю одного или нескольких винтов в воздухе, внезапную потерю управления и аварию. При обнаружении посторонних шумов немедленно совершите посадку следуя правилам «Процедура выключения» в разделе базовые процедуры и совершите визуальный осмотр коптера. Обеспечение безопасности при подготовке к взлёту: Соблюдение правил предполетной подготовки коптера. Проверить заряд пульта управления и аккумуляторов коптера. Убедиться в том, что все полностью заряжено! Аккумулятор должен плотно прилегать к корпусу и вставляться в отсек свободно, без перекосов. Подключение аккумулятора осуществляться в последнюю очередь, только перед вылетом! Важно: невыполнение данных условий может вызвать вибрацию, потерю одного или нескольких винтов в воздухе, вызвать потерю аккумулятора в полете, внезапную потерю управления, аварию и привести к травмам. Для полетов необходимо приготовить: Коптер; Пульт управления; Аккумуляторы; Зарядное устройство (при наличии места подключения); Мультиметр или другой измеритель напряжения; Запасные пропеллеры и элементы защиты; Изоленту, ножницы, набор отверток; Ленту или скотч для обозначения зоны полетов При соблюдении правил предполетной подготовки и обеспечение безопасности к вылету, можно отправляться к зоне полетов. Подготовка зоны полётовВ случае отсутствия безопасного воздушного пространства в виде куба с сеткой, который при возникновении непредвиденных ситуаций поможет защитить Вас и окружающих, необходимо определить зону для учебных полетов и ограничить ее лентой. Полеты в закрытом помещении – наклеить ленту на пол. Полеты на улице – растянуть ленту по воздуху, закрепив на крепкие опоры. Чек-лист. Проверить следующие пункты: Аккумуляторы плотно установлены в отсек и провода аккумулятора уложены так, что, будучи подключенными не помешают полетам. Пропеллеры установлены правильно, закреплены и свободно вращаются. Элементы защиты коптера целы и закреплены. Выбран правильный режим полета. Присутствующие люди находятся за спиной. На расстоянии 10 метров спереди и сборку нет людей. Обеспечение безопасности перед взлётом Располагать всех зрителей за спиной пилота и не допускать выхода зрителей в полусферу перед лицом пилота (в область пилотирования коптера). Помнить рассчитанное время полета коптера и его аккумулятора. Располагаться на расстоянии не менее 3-х метров от коптера при пилотировании на открытой площадке. Исключение может составлять лишь безопасное воздушное пространство, в виде куба ограниченное сеткой, здесь допускается расположение до 2 метров. Взлет осуществлять с ровной площадки. Если при активации моторов (Arm) вы услышите посторонний шум, незамедлительно отключите моторы (Disarm) и совершите визуальный осмотр коптера и установите причину возникновения постороннего шума. Важно: невыполнение данных условий может привести к конструктивным повреждениям коптера вплоть до выхода аппарата из строя, внезапную потерю управления, травмам и несчастным случаям. При соблюдении правил предполетной подготовки, обеспечение безопасности к вылету и перед взлетом, можно выполнить процедуру включения моторов и переходить к взлету. Обеспечение безопасности во время полётаОбеспечение безопасности во время полёта Во время полета коптера четко выполнять все указания преподавателя или лётного инструктора. Учебные полеты производить строго в обозначенной зоне и не допускать вылета за ее пределы. В случае если вы ее нарушили, незамедлительно вернуть коптер в обозначенное летное пространство или совершить посадку на месте, отключите двигатели, пульт дистанционного управления (Disarm) и вернитесь на исходную стартовую позицию. При обучении полетам летать на уровне ниже собственного роста и рядом с собой на расстоянии, на котором видна ориентация коптера в пространстве. В случае сомнений ориентации коптера немедленно совершить посадку на месте, отключите двигатели, пульт дистанционного управления (Disarm) и вернитесь на исходную стартовую позицию. Примечание: для определения ориентации УМК «Пионер» на полетном контроллере изображена специальная метка, которая подсказывает, где у коптера находится носовая часть. Однако в процессе полета разглядеть ее практически не представляется возможным, и в случае изменения курса по рысканию становится достаточно просто перепутать кормовую и носовую часть, что приводит к инверсии управления, быстрой дезориентация пилота, потере управления, аварии и может привести к травмам. Для того, чтобы в процессе полета всегда понимать, где у коптера носовая часть рекомендуется наклеить цветную ленту на элементы защиты коптера. При управлении коптером запрещаются резкие движения стиками, все движения выполняются плавно и аккуратно. Старайтесь не отрывать ваши пальцы от стиков управления. Летную практику осуществлять с предельной осторожностью и выполнять элементы пилотирования, в которых нет сомнений. Запрещается выполнять фигуры пилотажа, в успехе которых возникают сомнения, и фигуры, связанные с высоким риском аварийности. Примечание: Опыт пилотирования будет приходить со временем, получаемые практические и теоретические навыки будут открывать новые возможности пилотирования и помогать справлять с внештатными ситуациями оперативно. Не подвергайте высокой степени опасности себя и окружающих. Соблюдайте скоростной режим. Скорость полёта коптера держать в пределах скорости идущего человека Примечание: инерция – свойство тел сохранять состояние покоя или движения, пока какая-нибудь внешняя сила не изменит это состояние. Коптер продолжит движение в заданном направлении, даже если переместить стик направления в центральное положение. Чем выше скорость смены направления движения, тем выше значение силы инерции. Если лодку толкнуть на озере она плывет, пока трение об воду не остановит её, а трение воздуха еще ниже, чем воды, поэтому коптер будет лететь туда, куда вы его направите пока обратный импульс не погасит предыдущий. Для постоянного контроля инерции коптера необходим строгий скоростной режим и максимальная плавность передвижения стиков управления. Чем медленней и плавней движения стиков, тем выше контроль над коптером в воздухе. Вернуть коптер к месту посадки к рассчитанному времени, не допускать полной разрядки аккумулятора в полёте. Посадку осуществлять только на ровную открытую площадку вдали от препятствий. После запланированной посадки выполнить действия следуя правилам «Процедура выключения» в разделе базовые процедуры. Теория FPV-пилотированияКамера, установленная на борту квадрокоптера, может использоваться для решения многих задач, которые условно можно разделяются на две группы: Фото и видео съемка FPV управление FPV (First Person View) – сокращенное название системы управления полетами от «первого лица». Данная технология позволяет осуществлять приём с БПЛА видео изображения по дополнительному видео-радиоканалу в режиме реального времени, то есть пилот управляющий дроном, видит изображение, получаемое с видеокамеры при помощи устройств отображения (телефонов, мониторов, видео-очков). Основное назначение технологии FPV заключается в возможности управлять беспилотником на больших расстояниях и просматривать в режиме реального времени картину, захватываемую камерой. Технологию можно применять, как для развлечений, так и для решений задач в профессиональной сфере, например для отображения информации об окружающем поле и обеспечению ориентиров для обхода препятствий при, распылением удобрений и средств защиты растений в сельском хозяйстве, применение органами правопорядка и спасательных служб, в тех местах, где появление человека связанно с высоким риском для жизни, возможность осмотреть объект, прежде чем предпринимать меры при возникновении чрезвычайной ситуации и т д. Устройство системы FPVСистема FPV многокомпонентная и реализована по средству нескольких технологий. Первая представляет собой захват изображения, вторая – обработку полученных данных, и их дополнение информацией, полученной с датчиков (скорость полета, высота, состояние аккумуляторной батареи, расстояние до препятствия и т д.) для реализации сопряженной технологии OSD, третье – беспроводная передача и прием сигнала для вывода картинки и основной информации на экран. Бортовые видеокамерыКамеры, установленные на квадрокоптер, могут быть различными, как по габаритам, так и по основным характеристикам. Часто используют микрокамеры с наклонно-поворотным механизмом и камеры, установленные на стабилизирующий подвес. Основными показателями для FPV камер являются разрешающая способность и время задержки матрицы. Системы передачи и приема видеосигналаПередача видеопотока выполняется по средству передатчика и приемника. Основными характеристиками являются мощность передатчика, которая на прямую влияет на максимальную дальность его сигналов, и несущая частота. Большинство передатчиков работают в диапазонах 900 МГц (0.9 ГГц), 1,2 ГГц, 2,4 ГГц, 5,8 ГГц и по технологии передачи данных Wi-Fi. Ниже будут рассмотрены основные типы передачи видеосигналов. 2,4 ГГц (аналоговое) Среди частот подключения 2,4 ГГц наименее популярный диапазон. Главными причинами непопулярности является высокая чувствительность аналогового сигнала к помехам, подвержена размытию и шумам. Все из-за большого количества приборов, окружающих нас и работающих в данном диапазоне. Как например WiFi-устройства, Bluetooth, пульты дистанционного управления, тд. Как следствие сигнал будет неустойчивым, а передаваемое изображение, некачественным. 2,4 ГГц (цифровое) Наиболее универсальная технология передачи данных, в которой реализуются полеты в FPV режиме. Первой причиной является низкая стоимость Wi-Fi передатчика, которым оснащается камера беспилотника, а второе отсутствие дополнительного устройства для трансляции видеоизображения, а его роль успешно выполняет смартфон или планшет. Перед началом пилотирования устанавливается специальное приложение на гаджет и подключается к Wi-Fi точке коптера. Но есть и свои минусы: радиус передачи сигнала ограничен Wi-Fi зоной; задержка изображения значение которой увеличивается с удалением коптера от пульта дистанционного управления. 5,8 ГГц (аналоговое) Данный диапазон лучшего всего подходит для FPV-пилотирования. Частота передает видеоизображение с хорошей пропускной способностью на достаточно дальние расстояние. Задержка передачи данных практически не заметна и оптимальна для скоростных полётов. Однако различные препятствия, стены и т д., оказывают существенное влияние на дальность, как следствие дальность надежной работы видеоканала на частоте 5,8 ГГц снижается и применяется преимущественно на небольших коптерах. В зависимости от несущей частоты, сигнал принимается приемником, частота которого должна соответствовать частоте передатчика. В последствии преобразованный видеосигнал передается на экран монитора, очков. Стоить понимать, что приёмников большой дальности нет, поскольку диапазон сигнала зависит от мощности передатчика и антенны. Безопасность при FPV-пилотировании1. Следовать основным правилам техники безопасности визуального пилотирования предполетная подготовка коптера; обеспечение безопасности при подготовке к вылету; подготовка зоны полётов (при FPV-пилотировании подбирается просторная зона); чек-лист; обеспечение безопасности перед взлетом; обеспечение безопасности во время полёта. 2. Просторная зона для пилотирования. Полеты в режиме FPV, связанны с высоким риском потери представление о том, где находится ваш коптер и столкновении с другими объектами, так как ваше внимание сконцентрировано на экране (телефона, очков), а не на окружающем пространстве. Поэтому для полётов в FPV режиме необходимо подбирать просторные и открытые площадки вдали от зданий, линий электропередач, вышек сотовой связи, мест скопления людей, железнодорожных и автомобильных дорог, любых источников сигнала или электромагнитного излучения. 3. Расстояние Из-за разных линз камер, а особенно если она имеет эффект рыбьего глаза, при полётах в FPV все воспринимается иначе, чем при визуальном пилотировании, необходимо привыкнуть к размерам коптера и дистанции до объекта. Может казаться, что объект еще далеко, но на самом деле он расположен близко и наоборот. Поэтому при полётах в FPV режиме летай осторожно и при низкой скорости, чтобы привыкнуть к ощущению расстояния. 4. Полёты за пределы видимости. Высокую опасность представляют полёты на пределы видимости, так как видеоизображение, передаваемое с камеры коптера, ограничивает представление о реальности и может давать неверное ощущение высоты, скорости, направления и т п. Так же увеличиваются риски столкнуться с объектами, не различимыми на экране, например провода. Не летайте за пределами видимости, если не уверены в полной безопасности окружения. 5. Скоростной режим При полётах на высокой скорости на вашем пути могут возникнуть неожиданные препятствия, повышается риск столкновения с ними, по причине того, что вы можете не успеть остановиться. Поэтому при первых полётах, лучше держаться невысокой скорости. Так же при резком торможении необходимо помнить о тормозном пути коптера, и производить торможение заранее, не провоцируя возникновение аварии. Пилотирование в симуляторе.Перед тем, как брать в руки настоящую аппарату, необходимо освоить основные приемы управления коптером на виртуальных органах управления в программных игровых симуляторах. Физическая модель поведения БПЛА, так и его управления в симуляторе довольно близко повторяет реальные. Перед настоящим запуском коптера вы уже будете знакомы с основными командами управления на практике и будете помнить о их расположении на стиках пульта дистанционного управления, что не приведет к путанице стиков во время пилотирования коптера, разберетесь в том, как ведет себя аппарат и что он делает, отвечая маневрами на ваши команды. Для освоения основных приемов управления квадрокоптером, можно воспользоваться бесплатно распространяемой программой-симулятором PicaSim, которая позволяет выполнить полёт на экране компьютера (http://www.rowlhouse.co.uk/PicaSim/). Для работы с программой пульт управления подключается к компьютеру с помощью USB-кабеля. Практические упражнения пилотированияДля получения опыта пилотирования предложены следующие упражнения, рассчитанные на выполнение в режимах без удержания высоты и курсовой стабилизации. Упражнение 1. Взлет и посадка Прежде всего необходимо освоить правильные взлет и посадку. Плавно подвинув стик газа вперед до момента, когда коптер визуально будет буквально стремиться на взлет, в этой ситуации звук двигателей слегка меняет свою тональность. После одни точным движением стика увеличиваем тягу на величину, где коптер плавно, но резко оторвется от поверхности. Оказавшись на высоте 30-40 см, начинаем отрабатывать процесс посадки. Тут стоит быть особо внимательными, так как посадка является одной из самых трудных и опасных задач. Ни в коем случае не укладывайте сразу левый стик до упора вниз, тем самым полностью минимизируя тягу, которая приведет к резкому крушению коптера. Необходимо учиться плавно сбавлять газ стиком, снижая аппарат над поверхностью. Практический совет: Пульт дистанционного управления держите двумя руками, пальцы обеих рук всегда держатся за стики: левая – за стик газ / поворота вокруг оси, права – направление вперед/назад/влево/вправо. Движение стиками осуществлять без резких движений с максимальной плавностью. Повторяйте упражнение «взлет – посадка» не менее одного-двух десятков раз до автоматизма и полной уверенности при этом понемногу увеличивая высоту взлета в пределах 10-15 сантиметров, но не более 1.5 метров общей допустимой высоты. Упражнение 2. Зависание в воздухе (кормовой частью дрона к себе) Очень важно научиться удерживать коптер в воздухе на одной высоте и в одной точке вручную, без помощи дополнительного режима поддержание высоты. Коптер может сносить в сторону ветром и турбулентные завихрения будут вынуждать коптер двигаться в пространстве, а истощение заряда аккумулятора – постепенно терять высоту. Поэтому контроль полета в режиме «зависания в воздухе» – одно из важнейших упражнений в процессе освоения пилотирования коптера. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Двигая стик газа вверх-вниз работаем над контролем высоты в течении 30 секунд, не допускать движение им влево-вправо! В противном случае нос коптера начнет поворачиваться. При отклонении коптера из стороны в сторону, одновременно с левым стиком газа, работаем правым стиком тангажа (вперед/назад) и крена (влево/вправо) для стабилизации и удержании коптера в одном положении. После совершить мягкую посадку коптера в точку взлета. Практический совет: для более точного управления рекомендуется удерживать стики управления указательным и большим пальцем. Разница управления коптером одним пальцем и двумя велика. Таким способом проще контролировать, как скорость, так и направление коптера, а два средних пальца на грани пульта позволят использовать дополнительные возможности намного эффективней (снимать видео, делать фотографии, переключать режимы полета и т д.) без лишних движений. Повторяйте упражнение не менее одного-двух десятков раз, пока не научитесь удерживать коптер в пределах воображаемого полуметрового круга. Упражнение 3. Полёты вперед-назад и влево-вправо (кормовой частью дрона к себе) Отработав маневры по зависанию в воздухе и посадки, приступаем к движению коптера по сторонам. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Одновременно с левым стиком газа, работаем правым стиком тангажа (вперед/назад) и крена (влево/вправо) для того, чтобы отлететь в стороны. После совершить мягкую посадку коптера в точку взлета. Практический совет: повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневрах и автоматизма действий.  Упражнение 4. Полёт по кругу (кормой к себе) Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Отлетаем на небольшое расстояние от точки взлета, чтобы визуально хорошо контролировать стороны коптера. Не забываем контролировать газом высоту полета, плавно начинаем работать правым стиком тангажа (вперед/назад) и крена (влево/вправо) для полета вокруг точки взлета. После завершения маневра совершаем мягкую посадку коптера в точку взлета. Практический совет: повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневре и автоматизма действий.  Упражнение 5. Поворот вокруг вертикальной оси (висение боком к себе) Упражнение аналогично упражнению 2, однако усложнено тем, что поворот вокруг вертикальной оси осуществляется стиком, который попутно управляет газом. Рыскание наклон стика влево/вправо, коптер будет поворачивать носовую часть по часовой стрелке либо против часовой стрелки. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Поворачиваем коптер на 90 градусов против часовой стрелки и попутно фиксируя его на одной высоте и в одном положении в течении 30 секунд, затем поворачиваем обратно по часовой стрелке на 90 градусов и совершаем мягкую посадку коптера в точку взлета. Для стабилизации и удержания коптера в одном положении, работаем правым стиком тангажа (вперед/назад) и крена (влево/вправо). Практический совет: Самое сложное в этом упражнении – удержать коптер на одной высоте, так как сместив стик влево или вправо, чтобы повернуть нос коптера по часовой или против часовой стрелке, вы неумышленно можете добавить или наоборот убавить газ, из-за чего коптер может взлететь вверх или наоборот провалиться вниз. Главное старайтесь отработать удержании высоты одновременно с поворотами. Присутствие погрешности в сбросе или наборе газа во время сдвига стика управления влево-вправо поначалу будут неизбежны. Повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневре и автоматизма действий, пока коптера не будет отклоняться по высоте не более 20 см. Упражнение 6. Полёты вперед-назад и влево-вправо (боком к себе) Упражнение аналогично упражнению 3. Отработав маневр висение боком к себе, приступаем к движению коптера по сторонам с развернутым на 90 градусов носом. Тут стоит быть особо внимательными, так как коптер может быть повернут к вас носом, боком или кормой, но, если передвигать стик управления вперед, коптер полетит туда, куда направлена его носовая часть, а не туда куда направлен ваш взгляд. Всегда помните, где у коптера носовая часть. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Одновременно с левым стиком газа, работаем правым стиком тангажа (вперед/назад) и крена (влево/вправо) для того, чтобы отлететь в стороны. После совершить мягкую посадку коптера в точку взлета. Практический совет: повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневрах и автоматизма действий.  Упражнение 7. Полёт по линии с разворотами в крайних положениях (боком к себе) Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Поворачиваем коптер на 90 градусов по часовой стрелке, либо против часовой, затем начинаем движение по недлинному отрезку вперед, в конце разворачиваемся, смещая правый стик (крен) вправо или влево, одновременно проделав тоже самое с левым стиком (рыскание). При этом не забываем контролировать высоту, чтобы не свалиться в штопор и вернуть стики в вертикальное положение, чтобы завершить маневр разворота. Практический совет: очень важно соблюдать плавность и синхронность действий двух стиков крена и рыскания при развороте в конце отрезка. Повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневре и автоматизма действий. 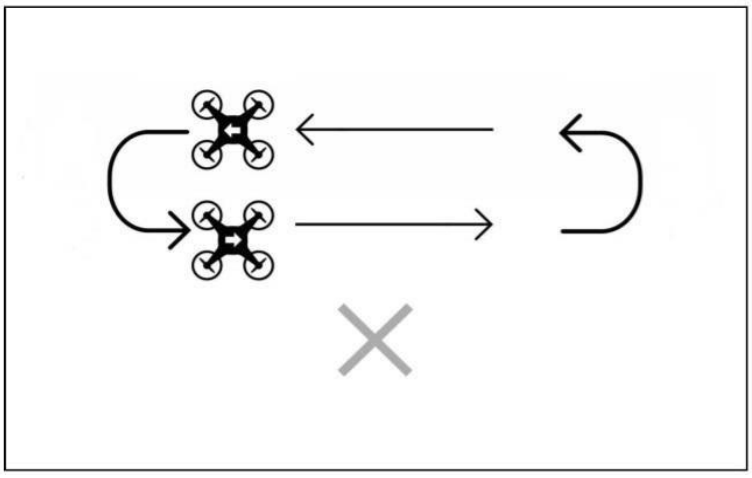 Упражнение 8. Поворот вокруг вертикальной оси (висение носом к себе) Упражнение аналогично упражнениям 2 и 5. Не забываем, так как коптер повернут к нам носом, передвинув стик управления вперед, коптер полетит туда, куда направлена его носовая часть, а не туда куда направлен ваш взгляд. Всегда помните, где у коптера носовая часть. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Поворачиваем коптер на 180 градусов против часовой стрелки и попутно фиксируя его на одной высоте и в одном положении в течении 30 секунд, затем поворачиваем обратно по часовой стрелке на 180 градусов и совершаем мягкую посадку коптера в точку взлета. Для стабилизации и удержания коптера в одном положении, работаем правым стиком тангажа (вперед/назад) и крена (влево/вправо). Практический совет: повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневре и автоматизма действий, пока коптера не будет отклоняться по высоте не более 20 см. Упражнение 9. Полёт по кругу (носом к вперёд) Упражнение аналогично упражнению 4. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Поворачиваем коптер на 90 градусов против, либо по часовой стрелке и попутно фиксируя его на одной высоте, плавно начинаем работать правым стиком тангажа (вперед/назад) и крена (влево/вправо). Смещая, правый стик (крен) вправо или влево, одновременно проделываем тоже самое с левым стиком (рыскание) для полета вокруг точки взлета. После завершения маневра совершаем мягкую посадку коптера в точку взлета. Практический совет: повторяйте упражнение не менее одного-двух десятков раз до полной уверенности в маневре и автоматизма действий. 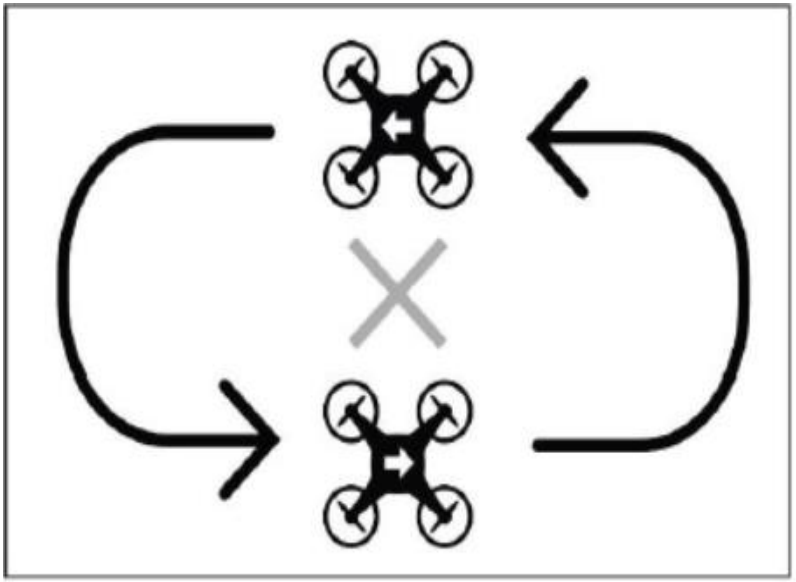 Выполнив успешно все предыдущие упражнения, отработав основные маневры пилотирования, ознакомившись с основными моментами безопасности при пилотировании в режиме FPV, переходим к двух заключительными упражнениям. Примечание: первые полеты в FPV рекомендуется выполнять в режиме удержания высоты. Упражнение 10. Пилотирование в FPV (в просторной зоне) Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Не забываем контролировать газом высоту полета, если полёт осуществляется без режима удержания высоты. Плавно начинаем работать правым стиком тангажа (вперед/назад) и крена (влево/вправо) для преодоления строго обозначенного маршрута согласно изображению. После преодоления маршрута совершаем мягкую посадку коптера в точке, противоположенной точке взлета. 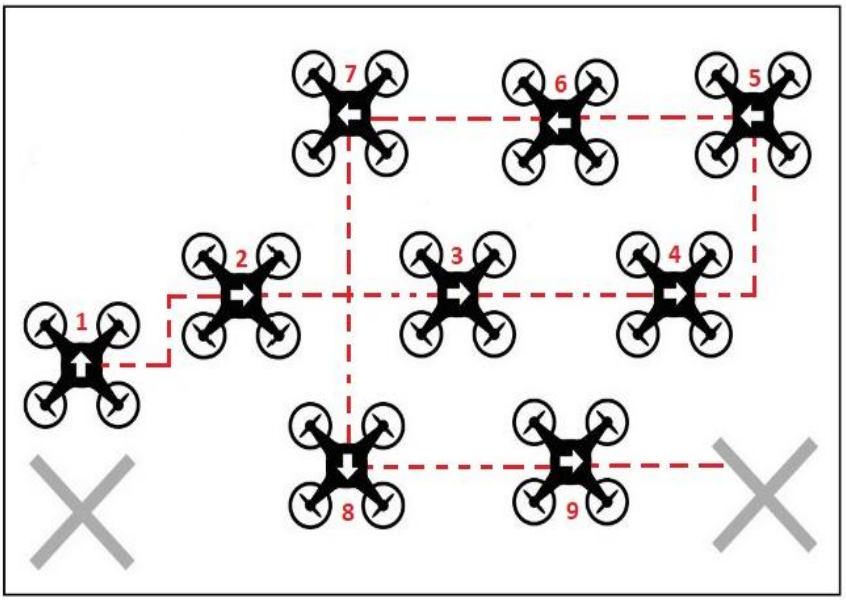 Упражнение 11. Пилотирование в FPV (c препятствиями) Упражнение с пролётами через кольца, ворота, рассчитанное на аккуратность управления коптером. Взлетаем и удерживаем коптер на высоте 1-1,5 метра над местом взлета. Не забываем контролировать газом высоту полета, если полёт осуществляется без режима удержания высоты. Плавно начинаем работать правым стиком тангажа (вперед/назад) и крена (влево/вправо) для преодоления строго обозначенного маршрута, через кольца согласно изображению (допустима другая вариация расстановки колец, ворот). После преодоления маршрута совершаем мягкую посадку коптера в точке, противоположенной точке взлета. 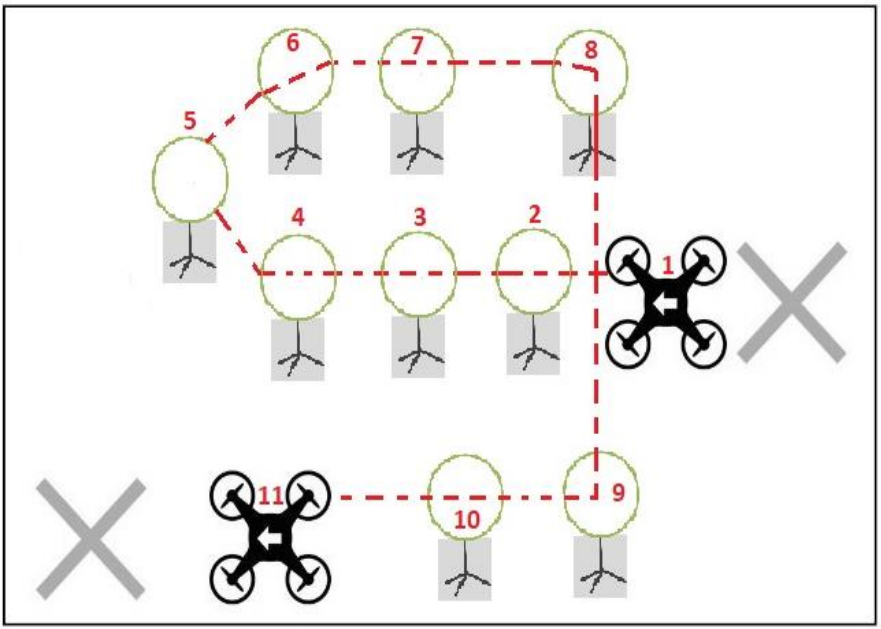 |