Метод указ к КР МПУ. Методические указания по выполнению курсовой работы для студентов очной формы обучения и миппс
 Скачать 0.6 Mb. Скачать 0.6 Mb.
|

|
Министерство образования и науки Российской Федерации ФГБОУ ВПО «Кубанский государственный технологический университет» Кафедра автоматизации производственных процессов МИКРОПРОЦЕССОРНЫЕ УСТРОЙСТВАМетодические указания по выполнению курсовой работы для студентов очной формы обучения и МИППС направления 220400.62 Управление в технических системах Краснодар 2014 Составители: ст. преп. Л. А. Посмитная; канд.техн.наук, доц. Е. В. Посмитный УДК 681.58 Микропроцессорные устройства: методические указания по выполнению курсовой работы для студентов очной формы обучения и МИППС направления 220400.62 Управление в технических системах / Сост.: Л. А. Посмитная, Е. В. Посмитный; Кубан. гос. технол. ун-т. Каф. автоматизации производственных процессов. – Краснодар: Изд. КубГТУ, 2014. – 24 с. Изложены требования к содержанию пояснительной записки и иллюстративной части курсовой работы, приведены варианты курсового проектирования. Даны методические рекомендации по выполнению и представлены примеры задач, решаемых при разработке микропроцессорных устройств. Ил. 5. Табл. 1. Библиогр.: 14 назв. Печатается по решению методического совета ФГБОУ ВПО «Кубанский государственный технологический университет» Рецензенты: д-р техн. наук, проф. кафедры АПП КубГТУ Д.Л. Пиотровский; ведущий инженер ОАО «НИПИгазпереработка» (г. Краснодар) канд. техн. наук, А.Ю. Арестенко ©  КубГТУ, 2014 КубГТУ, 2014СодержаниеМИКРОПРОЦЕССОРНЫЕ УСТРОЙСТВА 1 Содержание 4 Введение 5 1 Нормативные ссылки 6 2 Структура курсовой работы 6 2.1 Общие требования к структуре пояснительной записки 6 2.2 Требования к структуре основной части 6 2.3 Требования к структуре иллюстративной части 7 3 Содержание курсовой работы 7 3.1 Требования к содержанию разделов пояснительной записки 7 3.2 Рекомендации по оформлению иллюстративной части 11 4 Методические рекомендации по разработке микропроцессорного устройства 11 4.1 Обзор литературы 11 4.2 Состав микропроцессорных устройств 12 4.3 Опрос двоичного датчика 13 4.4 Устранение дребезга контактов 14 4.5 Реализация функций времени 15 4.6 Подключение клавишного пульта управления (КПУ) к микропроцессорной системе 15 4.7 Опрос аналоговых датчиков 16 4.8 Вывод и отображение информации 16 5 Методические рекомендации по подготовке к защите курсовой работы 17 Список литературы 18 Приложение А (справочное) 19 ВведениеСовременные технологические процессы и оборудование в различных областях промышленности отличаются высокой степенью автоматизации. Благодаря широкому внедрению микропроцессорной техники и микроэлектроники автоматизации поддаются как сложные, так и простые, монотонные процессы. Одновременно возросла сложность аппаратурной реализации управляющих устройств и её программного обеспечения. Поэтому сегодня инженер по управлению и автоматизации должен владеть прочными знаниями в области разработки и использования электронных и микропроцессорных устройств, иметь навыки их разработки и программирования. Тематика курсового проектирования охватывает многие направления применения микропроцессоров, варианты приведены в приложении А. 1 Нормативные ссылкиВ настоящих методических указаниях использованы ссылки на следующие нормативные документы: ГОСТ Р 21.408-93 СПДС. Правила выполнения рабочей документации автоматизации технологических процессов ГОСТ 2.701-2008 ЕСКД. Схемы. Виды и типы. Общие требования к выполнению ГОСТ 2.702-75 ЕСКД. Правила выполнения электрических схем ГОСТ 2.708- 81 ЕСКД. Правила выполнения электрических схем цифровой вычислительной техники ГОСТ 2.709-89 ЕСКД. Обозначения условные проводов и контактных соединений электрических элементов, оборудования и участков цепей в электрических схемах ГОСТ 2.710-81 ЕСКД. Обозначения буквенно-цифровые в электрических схемах ГОСТ 2.747-68 ЕСКД. Обозначения условные графические в схемах. Размеры условных графических обозначений ГОСТ 2.755-87 ЕСКД. Обозначения условные графические в электрических схемах. Устройства коммутационные и контактные соединения ГОСТ 2.756-76 ЕСКД. Обозначения условные графические в схемах. Воспринимающая часть электромеханических устройств ГОСТ 7.32-2001 СИБИД. Отчет о научно-исследовательской работе. Структура и правила оформления ГОСТ 7.9-95 СИБИД. Реферат и аннотация. Общие требования 2 Структура курсовой работы2.1 Общие требования к структуре пояснительной запискиПояснительная записка должна включать в себя следующие элементы, располагаемые последовательно: титульный лист; задание на курсовое проектирование; реферат; содержание; введение; нормативные ссылки; разделы основной части; заключение; список использованных источников; приложения. 2.2 Требования к структуре основной частиОсновная часть пояснительной записки должна включать в себя разделы, которые размещают в следующей последовательности: - описание объекта управления; - алгоритм управления и исследуемого режима работы; - формализация задачи и кодирование сигналов; - разработка технического обеспечения МПУ; - разработка программного обеспечения МПУ. 2.3 Требования к структуре иллюстративной частиИллюстративная часть должна включать в себя разработанные принципиальную электрическую схему устройства с перечнем элементов, структурную схему взаимодействия технического и программного обеспечения устройства, схемы алгоритмов подпрограмм. 3 Содержание курсовой работы3.1 Требования к содержанию разделов пояснительной записки3.1.1 Титульный лист и задание на курсовое проектирование выполняют в соответствии с требованиями СМК КубГТУ. 3.1.2 Реферат составляют на основе требований, регламентированных ГОСТ 7.9, и предъявляемых к реферату на отчет о научно-исследовательской работе по ГОСТ 7.32, который включает следующие элементы: - сведения о количестве в пояснительной записке страниц, иллюстраций, таблиц, приложений, использованных источников, например: 115 с., 9 рис., 12 табл., 35 источников, 3 прил.; - сведения о количестве листов и предметов иллюстративной части; - перечень ключевых слов и словосочетаний - от 5 до 15, взятых из текста пояснительной записки, которые в наибольшей степени характеризуют ее содержание и обеспечивают возможность информационного поиска. Ключевые слова приводят в именительном падеже и пишут заглавными буквами в строку через запятые; - текст реферата, отражающий, как правило, следующие позиции: объект исследования или разработки; цель работы; метод или методология проведения работы, полученные результаты; основные конструктивные, технологические и технико-эксплуатационные характеристики; рекомендации по внедрению; область применения; экономическая эффективность или значимость работы. Объем реферата на русском языке должен составлять от 0,5 до 0,75 страницы. Пример оформления приведен в приложении В. 3.1.3 Раздел «Содержание» включает наименование всех структурных элементов пояснительной записки, в том числе разделов, подразделов, пунктов (если они имеют наименования) основной части, с указанием их нумерации, обозначения и наименования приложений, а также номера страниц, на которых они помещены. 3.1.4 В разделе «Введение» необходимо дать оценку современного состояния решаемой задачи, сформулировать цель и задачу работы, подробно раскрыть отличительные особенности разрабатываемого устройства. 3.1.5 В разделе «Нормативные ссылки» необходимо привести перечень стандартов и других нормативных документов, на которые в тексте пояснительной записки даны ссылки. 3.1.6 В разделе «Описание объекта управления» указывают: особенности объекта управления, влияющие на проектные решения по автоматизируемым функциям; информационную модель объекта вместе с его системой управления; данные о системах управления, взаимодействующих с разрабатываемой системой, и сведения об информации, которой она должна обмениваться с абонентами и другими системами. Рациональный выбор аппаратных средств, разработка алгоритма управления и составление программного обеспечения функционирования микропроцессорной системы невозможны без детального описания функционирования объекта управления. Это описание может различаться по степени формализации от словесного (текстового) до аналитического (в виде математических формул). Рассмотрим объект на примере узла для приготовления рабочей смеси, представленного на рисунке 1. 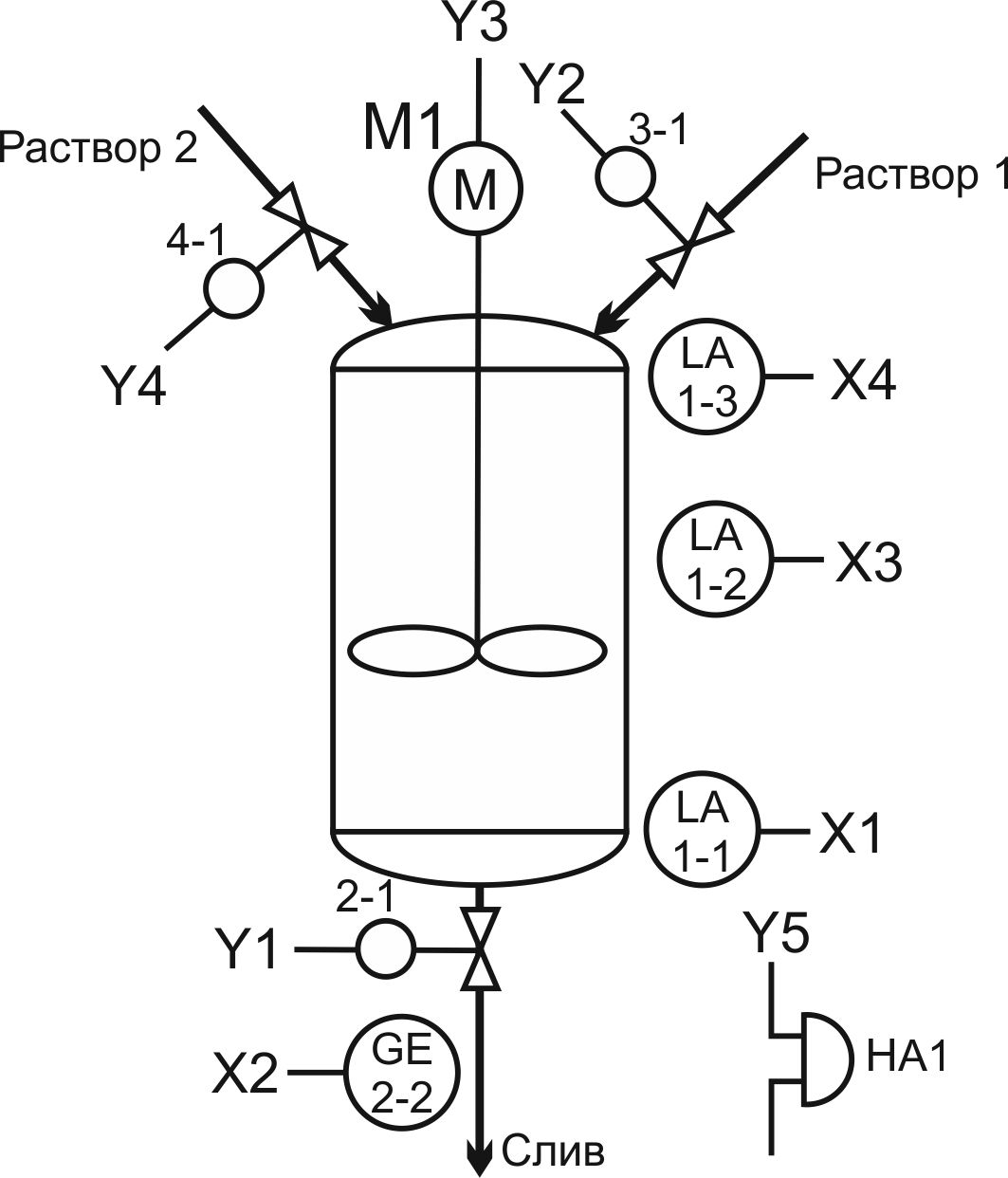 Рисунок 1 – Объект управления Рабочая смесь готовится циклически из двух растворов. Сначала подается раствор 1 до уровня, определяемого сигнализатором 1-2. Затем вентиль 3-1 закрывается. Включается мешалка (мотор М1) и в раствор 1 при перемешивании подается раствор 2 через вентиль 4-1. После заполнения бака (срабатывает сигнализатор 1-3), вентиль 4-1 закрывается, а сливной вентиль 2-1 открывается. Окончание выгрузки смеси определяется по сигнализатору уровня 1-1. Если цикл надо повторить, то следует отключить мешалку и закрыть сливной вентиль. Чтобы раствор 1 не попал через неплотно закрытый сливной вентиль, последний снабжен датчиком положения 2-2. При неплотно закрытом вентиле включается звуковая сигнализация (звук). Приведенное выше словесное описание может быть представлено в виде циклограммы, таблицы принятия решений, либо в виде схемы алгоритма. Рисунок 1 не дает детального представления об объекте, тогда как схема алгоритма однозначно определяет назначение объекта и всех его элементов. 3.1.7 В разделе «Формализации задачи и кодирования сигналов» требуется определить входные и выходные сигналы для разрабатываемого устройства управления, ввести необходимые логические (булевы) переменные и записать логические условия и логические функции логических переменных. Приведем примеры логических условий для рассмотренной выше задачи:
Выходные сигналы можно кодировать четырехзначными двоичными числами вида Если Аналогично можно обозначить выходные команды (сигналы): Кодирование сигналов позволяет облегчить связь микропроцессорного устройства с объектом управления через параллельный адаптер, либо порт микроконтроллера. 3.1.8 В разделе «Разработка технического обеспечения МПУ» должны быть описаны разработанная структурная схема микропроцессорного контроллера, назначение элементов схемы и их взаимодействие, принципиальная электрическая схема. 3.1.9 В разделе «Разработка программного обеспечения МПУ» необходимо описать схемы алгоритмов основной программы и подпрограмм, приведенных в иллюстративной части, используемых переменных и тектов разработанных подпрограмм. 3.1.10 Раздел "Заключение" должен содержать краткие выводы по результатам выполненной работы, оценку полноты решений поставленных задач, предложения по использованию результатов разработки, включая возможность внедрения разработанных предложений в реальных условиях производства, оценку технико-экономической эффективности и научно-технического уровня выполненного курсовой работы. 3.1.12 Раздел "Список использованных источников" должен содержать библиографические описания источников, использованных при составлении пояснительной записки. Источники в списке располагают в порядке появления ссылок на них в тексте пояснительной записки. 3.1.13 В приложения могут быть включены тексты программ функционирования разработанной схемы, таблицы вспомогательных цифровых данных. 3.2 Рекомендации по оформлению иллюстративной частиНа принципиальной электрической схеме показывают подключение к микроконтроллеру всех внешних устройств и элементов в соответствии со стандартами. Стандарты ГОСТ 2.701, ГОСТ 2.702 и ГОСТ 2.708 определяют общие требования и правила выполнения схем. ГОСТ 2.709 устанавливает требования к обозначению цепей, а ГОСТ 2.710 - к буквенно-цифровым обозначениям элементов схем. Общие требования по выполнению принципиальных схем систем автоматизации содержатся в ГОСТ 21.408. Требования к обозначению цепей принципиальных электрических схем определены ГОСТ 2.709. Графическое обозначение элементов схем устанавливаются группой стандартов «Обозначения условные графические в схемах». С помощью этих графических изображений могут быть выполнены принципиальные электрические схемы проектов автоматизации практически любой сложности. Возможны случаи, когда возникает необходимость в применении каких-либо графических изображений, не предусмотренных стандартами. Тогда допускается принять не стандартизированные графические обозначения, приводя при этом необходимые пояснения на схеме. Условные графические обозначения элементов схем изображают в размерах, установленных в стандартах на условные графические обозначения (ГОСТ 2.747, ГОСТ 2.755, ГОСТ 2.756). 4 Методические рекомендации по разработке |



| Тип | Название | Управление | Комментарий |
| 1 | 2 | 3 | 4 |
| Вых | Вентиль воды | При подаче лог. «0» вентиль открывается и остается открытым пока на выходе лог. «0» | При открытом вентиле в бачок поступает вода |
| Вых | Вентиль проявителя | При подаче лог. «0» вентиль открывается и остается открытым пока на выходе лог. «0» | При открытом вентиле в бачок поступает проявитель |
| Вых | Вентиль закрепителя | При открытом вентиле в бачок поступает закрепитель | При открытом вентиле в бачок поступает закрепитель |
| Вых | Вентиль слива | При подаче лог. «0» вентиль открывается и остается открытым пока на выходе лог. «0» | При открытом вентиле осуществляется слив жидкости из бачка |
| Вх | кнопка Пуск | При нажатии на вход микропроцессорного контроллера поступает лог. «1» | |
Продолжение таблицы А.1
| 1 | 2 | 3 | 4 |
| Вх | датчик Поплавок 1 | При активизации на вход микропроцессорного контроллера поступает лог. «1» | Активизация происходит при наполнении бачка |
| Вх | датчик Поплавок 2 | При активизации на вход микропроцессорного контроллера поступает лог. «1» | Активизация происходит при полном сливе жидкости из бачка |
| Вх | датчик Поплавок 3 | При активизации на вход микропроцессорного контроллера поступает лог. «1» | Активизация происходит при наполнении бачка выше нормы |
| Вых | Звук | При подаче лог. «0» возникает звуковой сигнал | Используется для сигнализации неисправности |
| Вых | лампочка Проявление закончено | При подаче лог. «0» загорается лампочка | |
| Вых | электродвигатель | При подаче лог. «0» включается электродвигатель | Электродвигатель вращает катушку с пленкой |
Вариант №7 Разработка микропроцессорной системы управления инкубатора
Требования к микропроцессорной системе:
1) включить систему обогрева камеры и систему поддержания влажности в течение 5 часов поддерживать температуру 38 0С, затем 30 минут поддерживать температуру 28 0С, так повторять;
2) влажность 50 % поддерживается постоянной;
3) обеспечить измерение значений температуры и влажности с периодичностью 5 минут;
4) вывод на дисплей значений температуры и влажности;
5) вывод текущего времени;
6) в случае отклонения температуры /влажности от заданной на 5 % зажечь светодиоды, отвечающие за температуру и влажность;
7) в случае отклонения температуры до 20 0С подать короткий звуковой сигнал;
8) в случае появления сигнала с датчика движения (вылупление цыпленка) подать звуковой сигнал в течение 1 минуты частотой 1 кГц.
Вариант №8 Разработка микропроцессорного устройства измерения и анализа веса человека
Требования к микропроцессорной системе:
1) максимальный вес пользователя: 150 кг;
2) точность измерения: 100 г;
3) сохранение измеренного веса в энергонезависимой памяти (память на 4 человека);
4) ввод имени пользователя;
5) ввод и сохранение величины роста (в метрах) пользователя;
6) вывод по запросу пользователя предыдущего взвешивания;
7) вывод на дисплей динамики веса за период, вводимый с клавиатуры;
8) вывод текущего значения индекса массы тела ИМТ, рассчитанный по формуле
ИМТ = вес в кг/ (рост в м)2;
9) при ИМТ>22 расчет количества лишних кг;
10) при ИМТ>25, зажечь красный светодиод – опасно!
Примечание:
ИМТ =19-21 соответствует норме;
ИМТ>22 соответствует наличию лишнего веса;
ИМТ>25 сигнал опасности ожирения.
Вариант №9 Разработка микропроцессорной системы контроля и управления работой хладоцентра ледового поля
Требования к микропроцессорной системе:
1) количество точек температурного контроля главной арены – 12, в том числе: грунта 4; бетонной плиты 4; границы раздела плита-лёд 4;
2) измерение температуры всех точек;
3) отображение текущей температуры;
4) включение/отключение систем охлаждения, обогрева грунта;
5) индикация о работе систем охлаждения, обогрева грунта;
6) оповещение аварийной ситуации (выхода из строя систем).
Вариант №10 Разработка микропроцессорной системы противодымной защиты офиса
Требования к микропроцессорной системе:
1) датчики дыма расположены в служебном помещении, на лестничной площадке, в лифтовой шахте. Всего датчиков – 3;
2) включение вытяжных систем;
3) включение клапанов дымоудаления;
4) переключающие устройства воздуховодов;
5) индикация состояния датчиков дыма;
6) индикация состояния клапанов и вытяжных систем.
Предусмотреть временные задержки.
Вариант №11 Разработка микропроцессорного устройства поддержания необходимого уровня жидкости в резервуаре
Требования к микропроцессорной системе:
1) измерение уровня жидкости;
2) задание частоты опроса датчика уровня;
3) отображение текущего уровня;
4) отображение интервала времени между двумя опросами;
5) ввод с клавиатуры заданных значений уровня (max, min);
6) индикация выхода уровня за рамки заданных пределов «Превышение выше максимального уровня», «Снижение ниже минимального уровня»;
7) управление открытием/закрытием клапана подачи жидкости в резервуар.
Вариант №12 Разработка микропроцессорной системы контроля температуры и влажности в теплице
Требования к микропроцессорной системе:
1) ввод с клавиатуры заданных значений температуры и влажности воздуха;
2) измерение температуры воздуха;
3) измерение влажности воздуха;
4) отображение измеренных величин;
5) индикация критических значений «Превышение выше максимального уровня», «Снижение ниже минимального уровня»;
6) управление включением/отключением нагревателя;
7) управление включением/отключением увлажнителя.
Вариант №13 Разработка микропроцессорной системы противопожарной защиты помещения
Требования к микропроцессорной системе:
1) измерение задымленности воздуха помещения;
2) измерение температуры воздуха помещения;
3) отображение измеренных значений;
4) индикация опасных значений задымленности и температуры воздуха;
5) управление включением/отключением вытяжных систем;
6) индикация состояния клапанов и вытяжных систем.
Предусмотреть временные задержки.
Вариант №14 Разработка микропроцессорной системы охраны нескольких помещений
Требования к микропроцессорной системе:
1) обнаружение разрыва цепи периметра;
2) обнаружение движущегося объекта;
3) индикация обнаруженных нарушений;
4) управление включением/отключением сигнализации;
5) обеспечение сигнала тревоги на пульте оператора.
Вариант №15 Разработка микропроцессорной системы управления процессом смешивания жидкостей
Требования к микропроцессорной системе:
1) задание величин: уровня первой жидкости, результирующего уровня;
2) задание времени перемешивания;
3) измерение уровня первой жидкости;
4) измерение результирующего уровня жидкости;
5) индикация текущих значений уровня;
6) индикация времени от начала процесса перемешивания;
7) управление включением/отключением двигателя перемешивания жидкостей;
8) сигнализация аварийного превышения уровня жидкости.
Вариант №16 Разработка микропроцессорной системы контроля электрических параметров сети 220 В, 50 Гц
Требования к микропроцессорной системе:
1) измерение напряжения сети;
2) измерение частоты напряжения;
3) преобразование измеренных сигналов в цифровой сигнал;
4) сравнение результатов с эталоном;
5) индикация текущих значений параметров сети;
6) индикация отклонений от эталона на 1 %;
7) аварийная сигнализация при отклонениях на 2 %.
Вариант №17 Разработка микропроцессорной системы слежения атмосферного давления
Требования к микропроцессорной системе:
1) задание требуемой величины атмосферного давления;
2) измерение текущего времени;
3) ввод значений атмосферного давления с барометра;
4) сравнение результатов с заданным значением;
5) индикация текущего времени и давления;
6) индикация величины отклонения от заданного значения.
МИКРОПРОЦЕССОРНЫЕ УСТРОЙСТВА
Методические указания
Составители: Посмитная Лариса Александровна;
Посмитный Евгений Владимирович
Темплан 2011 г.
Редактор С.С. Соколова
Компьютерная верстка Л.А. Посмитная
| Подписано в печать Бумага офсетная Печ. л. 1,5 Усл. печ. л. 1,39 Уч.-изд. л. 1,09 Цена | Формат 60х84/16 Офсетная печать Изд. № 232 Тираж 25 экз. Заказ № руб |
Кубанский государственный технологический университет
350072, г. Краснодар, ул. Московская, 2, кор. А
 Типография КубГТУ: 350058, г.Краснодар,
Типография КубГТУ: 350058, г.Краснодар, ул. Старокубанская, 88/4