КП_МПС_Абрамов. Микропроцессорное устройство управления регулятором температуры по заданному закону
 Скачать 2.47 Mb. Скачать 2.47 Mb.
|

 Министерство образования РФ Министерство образования РФВладимирский государственный университет Муромский институт Факультет ФРЭКС_ Кафедра ЭиВТ КУРСОВОЙПРОЕКТ По_____________Микропроцессорные системы__________________ (наименование дисциплины) Тема _Микропроцессорное устройство управления регулятором____ _______________температуры_по заданному закону_______________ Руководитель ___________________ Кулигин М.Н.____ (оценка) (фамилия, инициалы) (подпись) (дата) Члены комиссии Студент __ ЭВМт-306___ (группа) Абрамов А.В._____ (подпись) (Ф.И.О.) (фамилия, инициалы) (подпись) (Ф.И.О.) (подпись) (дата) Муром 2009 В данном курсовом проекте было разработано микропроцессорное устройство управления регулятором температуры по заданному закону. Была разработана схема электрическая принципиальная, подобрана элементная база, был произведен расчет мощности и разработан блок питания. Также была написана программа под эту систему. In the given academy year project the microprocessor device of management of a regulator of temperature under the set law has been developed. The electric basic scheme has been developed, the element base was picked up, calculation of power has been made and the power unit was developed. Also has been written the program under this system.  Содержание СодержаниеВведение 7 1 Анализ технического задания 9 2 Разработка структурной схемы и ее описание 17 2.1 Блок ввода и оцифровки температуры 18 2.2 Блок управления термостатом 19 2.3 Пульт управления 21 2.4 Четырёхразрядный индикатор 22 3 Выбор элементной базы и разработка схемы электрической принципиальной 23 3.1 Проектирование схемы микропроцессорного блока 24 3.2 Проектирование блока управления и индикации 29 3.3 Проектирование блока ввода и оцифровки показаний термодатчика 32 3.4 Выбор АЦП 33 3.5 Проектирование блока управления термостатом 36 4 Расчет потребляемой мощности и разработка блока питания 38 5 Разработка и расчет модуля памяти 41 5.1 Модуль ОЗУ на базе микросхемы КР537РУ14Б 43 5.2. Модуль ПЗУ на базе микросхемы КР556РТ13 45 5.3 Разработка карты памяти 47 5.4 Разработка дешифратора для модуля памяти 49 5.5 Проверка согласования микросхем МПС по току 50 5.6 Проверка сопряжения по емкостным параметрам 53 5.7 Проверка согласования временных диаграмм МП и ЗУ 54 6 Разработка ПО на языке ассемблера 57 Заключение 58 Список литературы 59 Приложения:  Приложение А. Текст программы на языке Приложение А. Текст программы на языке ассемблера МК-51 60 Приложение Б. Схема электрическая принципиальная микропроцессорного устройства управления терморегулятором по заданному закону 66 Приложение В. Перечень элементов микропроцессорного устройства управления терморегулятором по заданному закону 68 Приложение Г. Схема электрическая принципиальная модуля памяти 71 Приложение Д. Перечень элементов модуля памяти 73 Введение Современная электронная техника представляет собой сложные системы, реализованные на базе микроэлектроники и средств вычислительной техники. Вычислительные средства являются важнейшей составной частью различных устройств радиоэлектронной аппаратуры. Широкий спектр применения вычислительных средств во многом определяется появлением у конструкторов доступных по цене и миниатюрных по размеру микроконтроллеров и микропроцессоров. Микроконтроллер (МК) – это программно управляемая большая интегральная схема (БИС), предназначенная для обработки цифровой информации. Наибольший эффект от внедрения МК достигается в устройствах и системах локальной автоматики, системах измерения, контроля и других областях, в которых применяются средства цифровой обработки данных. Сравнительно низкая стоимость, малые габариты и потребляемая мощность, высокая надежность и исключительная гибкость, не свойственная другим способам обработки данных, обеспечивает приоритет МК перед другими средствами обработки данных.  Наибольший эффект применения микроконтроллеров достигается при встраиваемом варианте его использования, когда МК встраивается внутрь приборов, устройств или машин. В таком варианте использования от МК требуется не столько вычислительная производительность, сколько логическая оперативность, столь необходимая в задачах управления. Наибольший эффект применения микроконтроллеров достигается при встраиваемом варианте его использования, когда МК встраивается внутрь приборов, устройств или машин. В таком варианте использования от МК требуется не столько вычислительная производительность, сколько логическая оперативность, столь необходимая в задачах управления. Использование МК в оборудовании позволяет повысить производительность, качество, помогает решать сложные проблемы программного регулирования, существенно улучшает технико-экономические характеристики автоматизированного оборудования, повышает его «интеллект». Использование МК в оборудовании позволяет повысить производительность, качество, помогает решать сложные проблемы программного регулирования, существенно улучшает технико-экономические характеристики автоматизированного оборудования, повышает его «интеллект».1 Анализ технического задания  В данном курсовом проекте требуется разработать микропроцессорную систему для управления температурой термостата. Заданы следующие исходные данные: Контроллер реализовать на базе ОЭВМ, тип ОЭВМ выбрать и обосновать; Модуль памяти объёмом 2Кх8; Требуемый закон изменения температуры в термостате (см. график на рис.1); Блок управления и индикации, тип индикатора АЛС330А; Для формирования временных интервалов необходимо использовать внутренние таймеры МК; Тип датчика температуры и тип АЦП необходимо выбрать и обосновать.  Рисунок 1.1 - График изменения температуры в термостате В данном КП требуется разработать структурную схему МПС, схему электрическую принципиальную, провести необходимые расчёты к ней и написать управляющую программу на ассемблере.  Согласно ТЗ требуется разработать систему управления температурой в термостате на основе ОЭВМ. Температура регистрируется внутри термостата датчиком температуры и сравнивается программными средствами ОЭВМ с заданным значением на рисунке 1. Согласно ТЗ требуется разработать систему управления температурой в термостате на основе ОЭВМ. Температура регистрируется внутри термостата датчиком температуры и сравнивается программными средствами ОЭВМ с заданным значением на рисунке 1.Состав аппаратных средств частично задан (тип м/с памяти, тип индикатора), а остальные компоненты схемы необходимо выбрать и обосновать. В состав блока управления, кроме четырёхразрядного индикатора, входят 2 управляющие клавиши (кнопки): «Сброс» и «Старт». С помощью индикатора будет отображаться текущая температура термостата. Кнопка «Сброс» позволяет вернуть систему в исходное состояние (в случае зависания), а сигнал от кнопки «Старт» сообщает ОЭВМ о начале цикла регулирования температуры. Сигнал от кнопки «Старт» целесообразно подать на вход запроса прерывания ОЭВМ. Это позволит упростить ПО разрабатываемой системы. Регулирование температуры в термостате будет осуществляться с помощью коммутации нагревателя (для повышения температуры) и вентилятора (для снижения температуры), когда температура становится ниже или выше установленной законом управления. Далее рассмотрим заданный в ТЗ закон управления. Анализ зависимости температуры от времени (рисунок 1) показывает, что цикл регулирования температуры включает 4 независимых временных интервала: ∆t1=30c, ∆t2=20c, ∆t3=15c, ∆t4=15c. Скорость изменения температуры на каждом их этих интервалов различна. Согласно ТЗ для формирования временных задержек в системе управления температурой необходимо использовать внутренние таймеры МК.  Для их программирования необходимо рассчитать скорость изменения температуры на каждом участке ∆t: Для их программирования необходимо рассчитать скорость изменения температуры на каждом участке ∆t:V1=(30-10)/(30-0) = 0,66°С/c V2=(20-30)/(50-30) = -0,5°С/c V3=(15-20)/(65-50) = -0,33°С/c V4=(15-15)/(80-65) = 0°С/c Для управления законом регулирования температуры необходимо рассчитать частоту измерения температуры в термостате, то есть как часто система будет считывать значение температуры в термостате (шаг дискретизации). Для этого вычислим время изменения температуры на 1°С на каждом участке закона управления: ∆1=1/V1=1,5 сек; ∆2=1/V2=2 сек; ∆3=1/V3=3 сек; ∆4=1 сек.  Рисунок 1.2 – Частота измерения температуры в термостате  Работа МПС в данном случае сводится к выполнению следующих действий в начале каждого цикла управления длительностью t: Определить текущее фактическое значение температуры Tтек.: выполнить с помощью АЦП аналого-цифровое преобразование выходного сигнала датчика температуры, после чего прочитать результат преобразования и поместить его в соответствующую ячейку памяти. Определить (вычислить) требуемое значение температуры Tтреб. для данного момента времени. Вычислить разность между фактическим и требуемым значениями температуры: T = Tтек. – Tтреб. Если T < 0, включить нагреватель. Если T > 0, включить вентилятор. Перейти в состояние ожидания до начала следующего цикла управления. Требуемая точность регулирования температуры в задании задана и составляет Т ≤ ± 5%. Техническое задание рекомендует использовать для микропроцессорного блока однокристальные микро-ЭВМ серии MCS-51. Организация ОЭВМ этой серии ориентирована на их применение в системах управления и регулирования. Согласно ТЗ на курсовой проект необходимо выбрать конкретный тип ОЭВМ, выбираем AT89C51.  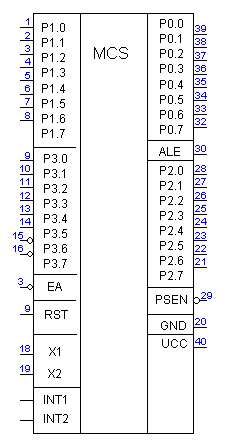 Рис. 1.3.Схема электрическая принципиальная МК AT89C51 На сегодняшний день существует несколько законов управления: Двухпозиционный закон регулирования – самый простой метод регулирования температуры: нагреватель включен, если текущая температура ниже задания, и отключен, если превышает задание. Для предотвращения «дребезга» вблизи заданного значения устанавливается гистерезис или, иначе, зона нечувствительности. Точность регулирования температуры в какой-то степени зависит от величины гистерезиса, чем он меньше, тем точнее регулирование, но тем чаще включается нагреватель. При управлении объектом по этому закону всегда присутствуют колебания температуры, амплитуда и период которых мало зависят от регулятора, а определяются конструкцией и параметрами объекта.  При трехпозиционном законе, позволяющем уменьшить колебания температуры, используется регулирующее устройство в двухпозиционном режиме, компаратор в режиме «0» и, соответственно, два выхода регулятора. Используя прямые и инверсные выходы регулирующего устройства и компаратора, а также различные соотношения между заданиями 1 и 2, можно реализовать много вариантов управления объектами, в том числе двухступенчатое регулирование, совместное использование нагревателей и охладителей и др. ПИД (пропорционально интегрально дифференциальный закон) – закон регулирования обеспечивает значительно более высокую точность поддержания температуры, чем предыдущие. В этом случае регулятор учитывает величину и продолжительность отклонения, а также скорость его изменения. Качество регулирования зависит, прежде всего, от того, насколько оптимально коэффициенты ПИД –закона соответствуют свойствам объекта. Выходной сигнал регулирующего устройства может быть двух видов: аналоговый (0…5 мА или 4…20 мА), который подается на исполнительные устройства, имеющие соответствующий вход; как правило эти устройства представляют собой мощные фазоимпульсные модуляторы, позволяющие плавно изменять ток нагрузки; широтно-модулированный (ШИМ), при котором мощность, выделяемая нагревателем, пропорциональна Твкл / Тр, где Тр – период регулирования, Твкл – время включения нагрузки (см. рис.).  Период регулирования может быть выбран фиксированным или равным С/20, где С – постоянная времени интегрирования ПИД – закона. Фиксированный период регулирования (0,8 сек. при разрешении 1 оС или 1,6 сек. при разрешении 0,1 и 0,01 оС) устанавливается при использовании нагревателей, обладающих небольшой тепловой инерцией. Вид выходного сигнала при ПИД – законе определяется первым параметром меню РЕЖИМ Период регулирования может быть выбран фиксированным или равным С/20, где С – постоянная времени интегрирования ПИД – закона. Фиксированный период регулирования (0,8 сек. при разрешении 1 оС или 1,6 сек. при разрешении 0,1 и 0,01 оС) устанавливается при использовании нагревателей, обладающих небольшой тепловой инерцией. Вид выходного сигнала при ПИД – законе определяется первым параметром меню РЕЖИМОграничение мощности - максимальный уровень мощности, возможный при работе регулятора; выражается в процентах от мощности, выделяемой при постоянно подключенном нагревателе/охладителе. Установка этого параметра меньше 100% применяется для объектов, не допускающих подачу полной мощности. Коэффициенты ПИД - закона регулирования, к которым относятся диапазон пропорциональности (b) и постоянная времени интегрирования (С) определяют точность выполнения термической программы. Оптимальные значения коэффициентов зависят от конструкции объекта и первичного преобразователя, массы загрузки, рабочей температуры. Чем больше температура, тем меньше должны быть значения b и С при прочих равных условиях. Чем больше загрузка, тем меньше b и больше С, однако, коэффициент С слабо зависит от загрузки. Значения коэффициентов могут быть определены регулятором с помощью режима самонастройки или введены вручную, если они известны. Диапазон коэффициентов, а также шаг установки зависят от выбранной разрешающей способности индикации температуры. В данном курсовом проекте мы будем использовать двухпозиционный закон регулирования, т.к данный закон дает нам требуемую точность при несложной реализации.  Данный закон управления широко используется в разных системах управления. Рассмотрим электронный блок управления электровентилятором системы охлаждения двигателя: Данный закон управления широко используется в разных системах управления. Рассмотрим электронный блок управления электровентилятором системы охлаждения двигателя: Рисунок 1.4. Схема электрическая принципиальная PID-регулятора При повышении температуры датчика выше точки установленной вами для включения вентиляции, потенциалы на входах ОУ1 сравниваются и на выходе генерируется типа ШИМ сигнал - т.е. сигнал с определенным соотношением времени низкого уровня и высокого уровня - этот сигнал интегрируется цепочкой R5 C2 и когда напряжение на C2 достигнет примерно 2/3 напряжения питания (такой потенциал на входе "-" ОУ2 благодаря резисторам R6-R8) ОУ2 переключится и на его выходе возникнет высокий уровень транзистор откроется и реле включится. При открытии транзистора на входе "-" ОУ2 потенциал скачком уменьшиться примерно до 1/3 напряжения питания - это задает минимально возможное время переключений реле - равно оно времени изменения напряжения С2 на 1/3 напряжения питания и определяется примерно так С2*R5 секунд. Благодаря этому не происходит бесконечного переключения реле (опасного выгоранием его контактов) несмотря на довольно медленно меняющуюся температуру двигателя. 2 Разработка структурной схемы и ее описание На основании сделанного анализа пунктов технического задания на КП в состав аппаратных средств контроллера управления температурой в термостате входят следующие компоненты: ОЭВМ типа AT89C51; блок ввода и оцифровки температуры; блок управления термостатом; пульт управления; 4-разрядный индикатор; Общая структурная схема разрабатываемой МПС приведена на рисунке 2.1  Рисунок 2.1 - Структурная схема МПС  2.1 Блок ввода и оцифровки температуры Для управления температурой термостата по заданному закону контроллеру необходимо отслеживать температуру внутри термостата. С этой целью в термостате должен находиться датчик температуры, вентилятор и нагреватель. Текущее значение температуры с помощью АЦП будет преобразовываться в цифровой код и сравниваться с температурой, заданной по закону управления. Вентилятор и нагреватель позволяют изменять температуру внутри термостата. На рисунке 4 показана структура блока ввода и оцифровки температуры.  Рисунок 2.2 - Структурная схема блока ввода и оцифровки температуры TD - термодатчик со встроенным усилителем; МУ - масштабируемый усилитель; АЦП - 8-разрядный аналогово-цифровой преобразователь; ШФ - шинный формирователь; Н - нагреватель (источник цифровой энергии); В - вентилятор; ИОН - источник опорного напряжения; БЭУТ - блок электронного управления термостатом.   |