ннннннннн. пример. Моделирование процесса обработки сигналов от электромиографической сенсорной системы бионического протеза кисти
 Скачать 0.67 Mb. Скачать 0.67 Mb.
|

|
Название работы: «Моделирование процесса обработки сигналов от электромиографической сенсорной системы бионического протеза кисти» Цель работы: Создание электромиографической сенсорной систем бионического протеза кисти, снятие и обработка сигналов для последующего обучения нейронной сети. Задачи: - провести обзор методов и способов снятия сигналов для бионических протезов, способов обучения нейронных сетей; - собрать комплекс для снятия электромиограмы; - снять и обработать электромиографические сигналы; - проанализировать полученные данные; - выполнить подготовку к обучению модели нейронной сети; - обучить нейронную сеть. Магистерская работа состоит из следующих разделов: Обзорная часть (в которой проводится поиск известных методов и устройств решающих заданную задачу). Способы снятия электромиограмм: - с помощью введения в мышцу игольчатых электродов; - с помощью накожных электродов; - с помощью стимуляционной электромиографии.  Электромиограф Nemus 1  Компактный ЭМГ-датчик Раздел посвященный созданию технического обеспечения Здесь разрабатывается будущая система, которая будет выполнять требуемые функции, подбираются или проектируются необходимые компоненты системы (датчики, корпус и тд.) Датчик подключается к Arduino UNO по следующей схеме. 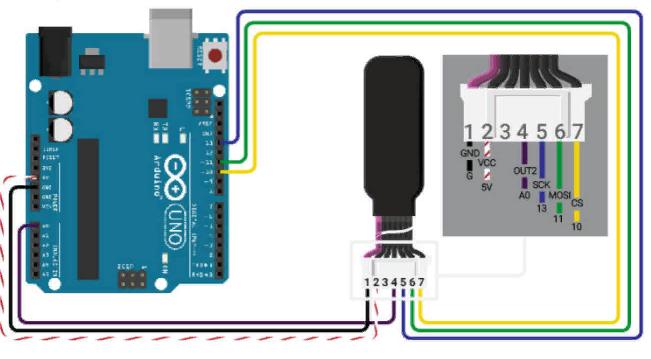 Схема подключения датчика к Arduino UNO Для того чтобы снизить влияния электрической сети необходимо использовать USB-изолятор. Схема подключения USB-изолятора к Arduino и ПК показана на рисунке.  Схема подключения изолятора к ПК и Arduino Общий вид комплекса вместе с результатом показан на следующем рисунке. 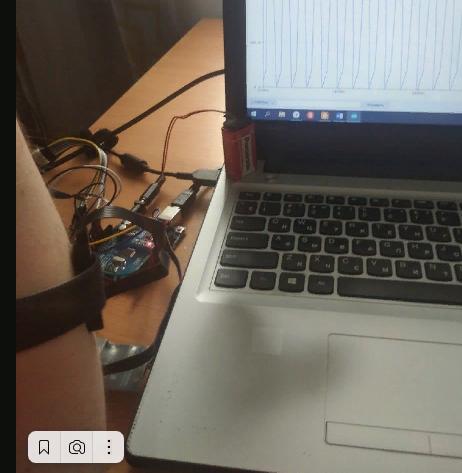 Электромиографическая сенсорная система После того как система была собрана необходимо снять нужные данные. Нужно получить электромиограмму для трёх положений: покой, раскрытая ладонь, кулак. Примеры положений показаны на рисунке 11.   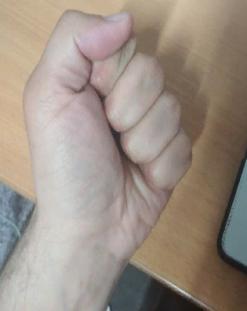 Рисунок 11 – Три положения для снятия данных Раздел посвященный созданию алгоритмической системы. В данном разделе создаются алгоритмы и программное обеспечение комплекса. В данной работе для снятия данных необходимо написать программу для Arduino, которая будет получать уровень сигнала и время. Далее эти данные необходимо передать на COM-порт. Затем нужна программа для Python которая будет считывать данные с COM-порта и записывает в текстовый файл.  Программа для ардуино В данном разделе происходит обработка и представление данных в нужном нам формате и виде. Так же здесь формулируются результаты проделанной работы. Обработка может проводиться как «вручную», так и автоматизировано. Построим график, чтобы наглядно увидеть сигнал. По данному графику сложно что-либо сказать, поэтому необходимо взять часть сигнала в виде 100 значений 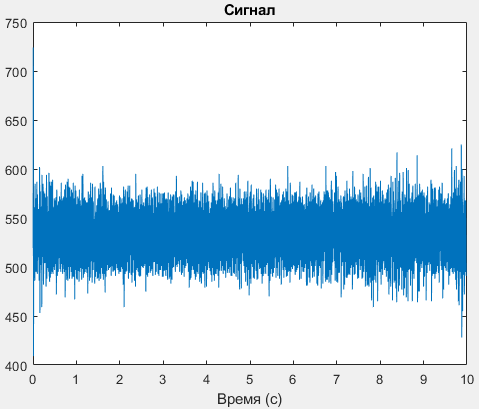 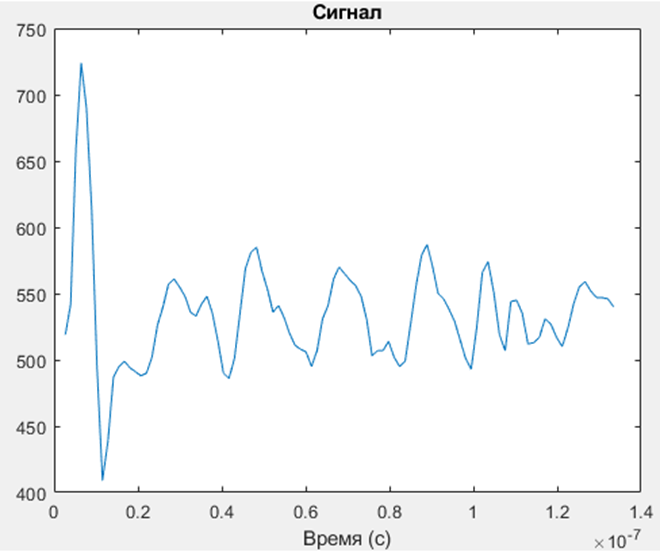 Электромиограмма сжатого кулака Далее необходимо произвести преобразование Фурье, используя библиотеку Matlab и построить спектрограмму. Спектрограмма сжатого кулака показана на рисунке. Аналогично повторяем процесс для двух других положений. 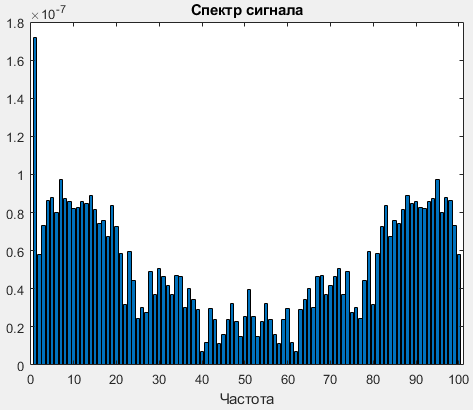 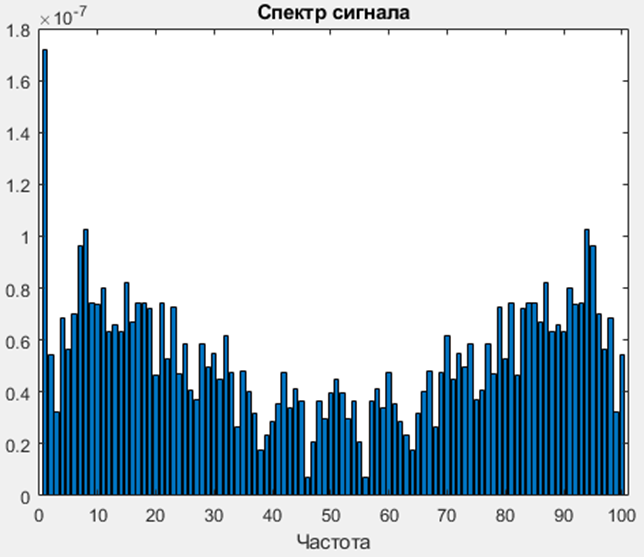 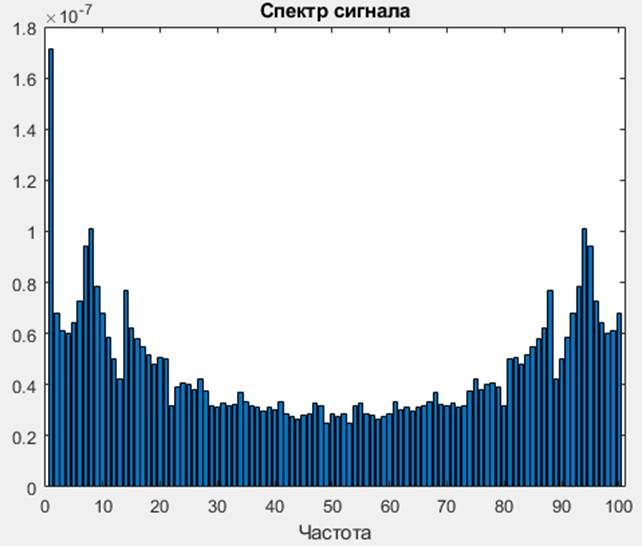 Спектрограммы положений. Сравнив спектрограммы трёх положений, мы видим существенные различия. Далее происходит подготовка и обучение нейронной сети. |