Модернизация Электропривода наждачного станка.. Модернизация Электропривода наждачного станка. Данные для построения диаграмм
 Скачать 221.65 Kb. Скачать 221.65 Kb.
|

Глава 3. Модернизация Электропривода наждачного станка.Данные для построения диаграмм: n1 = -15 об/мин - частота вращения на 1 рабочей ступени, t1 = 15 с - время работы на 1 ступени, n2 = 105 об/мин - частота вращения на 2 ступени, t2 = 60 с - время работы на 2 ступени, t0 = 5 с - время паузы. Нагрузка имеет активный характер, т.е. момент не меняет свой знак при изменении направления вращения машины. Ммех. = 900 Нм - момент нагрузки (механизма) на валу двигателя, ηперед. = 0,95 - коэффициент полезного действия передачи, Јмех. = 30 кгм2 - момент инерции механизма. 3.1. Тахограмма и нагрузочная диаграмма производственного механизма Рис 3.1.1. Тахограмма производственного механизма  Рис.3.1.2. Нагрузочная характеристика производственного механизма для активного характера нагрузки. 3.2. Выбор двигателя на основании технического заданияОпределяем продолжительность включения  Выбираем стандартное (15%, 25%, 40%, 60%, 90%), ближнее по величине, значение продолжительности включения: ПВкат =90 Определяем диапазон регулирования:  Определяем среднеквадратичное значение мощности за время работы на основании тахограммы и нагрузочной диаграмм:  кВт, кВт,где m - число рабочих участков в цикле;  - время работы на i-м участке цикла; - время работы на i-м участке цикла; - коэффициент ухудшения теплоотдачи на i-м участке цикла; - коэффициент ухудшения теплоотдачи на i-м участке цикла; - мощность нагрузки на валу механизма на i-м участке цикла; - мощность нагрузки на валу механизма на i-м участке цикла; -максимальная скорость механизма; -максимальная скорость механизма; - угловая скорость на i-м участке. - угловая скорость на i-м участке.Определение значений угловых скоростей по ступеням: первая ступень  рад/с, рад/с,вторая ступень  рад/с. рад/с.Определение мощности на i-м участке работы: первая ступень  кВт, кВт,вторая ступень  кВт. кВт.Определим коэффициенты ухудшения теплоотдачи по ступеням по выражению:  , ,где  - коэффициент ухудшения теплоотдачи при неподвижном якоре (роторе), принимаемый для двигателей закрытого исполнения без принудительного охлаждения β0 = 0.95; - коэффициент ухудшения теплоотдачи при неподвижном якоре (роторе), принимаемый для двигателей закрытого исполнения без принудительного охлаждения β0 = 0.95;Для первого участка  , ,Для второго участка  . .Среднеквадратичное значение мощности:  . .Делаем пересчет среднеквадратичной мощности двигателя на выбранное стандартное значение ПВ=90%  кВт, кВт,Определяем расчетную мощность электрического двигателя:  где kЗ = (1.1÷1.3) - коэффициент запаса; ηмех - КПД передачи при nмакс, Принимаем kЗ=1.2.  кВт. кВт.Выбор двигателя. Выбираем асинхронный двигатель с фазным ротором типа АК16058УЗ имеющий следующие паспортные данные Таблица 3.2. Паспортные данные, выбранного двигателя.
Частота вращения 750 об/мин. Номинальное скольжение:  (3.15) (3.15)Определим передаточное отношение редуктора:  (3.16) (3.16)где  рад/с - номинальная угловая скорость вращения двигателя. рад/с - номинальная угловая скорость вращения двигателя.В нашем случае:  . (3.17) . (3.17)Принимаем передаточное отношение редуктора из стандартного ряда передаточных чисел: iр. ст=8. 3.3. Расчёт и построение естественных механических и электромеханических характеристик двигателя.Определяем угловую скорость идеального холостого хода:  (3.18) (3.18)Номинальная скорость двигателя  Номинальный момент двигателя  H H м мИспользуя значение коэффициента перегрузки  , определяем критический момент двигателя: , определяем критический момент двигателя: (3.19) (3.19)Определяем критическое скольжение естественной характеристики:  (3.20) (3.20)Значения электромагнитного момента М при разных скольжениях s получаем из упрощенного уравнения механической характеристики (упрощенная формула Клосса):  (3.21) (3.21)Вычисляем значения М и  при s от 0 до 1 и составляем таблицу 3.3.1. при s от 0 до 1 и составляем таблицу 3.3.1.Таблица 3.3.1
По полученным значениям М строим естественную механическую характеристику, представляющую собой зависимость электромагнитного момента асинхронного двигателя М от скольжения s. При построении характеристики необходимо учесть, что при критическом скольжении  значение момента максимально и равно значение момента максимально и равно  . .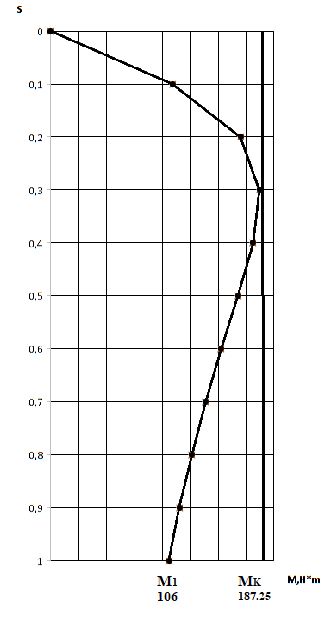 Рис. 3.3.1. Естественная механическая характеристика асинхронного двигателя с фазным ротором Для построения естественной электромеханической характеристики воспользуемся формулой:  (3.22) (3.22) (3.23) (3.23)Вычисление значений тока  производится с использованием данных таблицы 3.3.1. Для значений s от 0 до 1 берутся полученные значения момента М и подставляются в вышеприведенную формулу. Вычисляем значения и составляем таблицу 3.3.2. производится с использованием данных таблицы 3.3.1. Для значений s от 0 до 1 берутся полученные значения момента М и подставляются в вышеприведенную формулу. Вычисляем значения и составляем таблицу 3.3.2.Таблица 3.3.2
По полученным значениям строим естественную электромеханическую характеристику.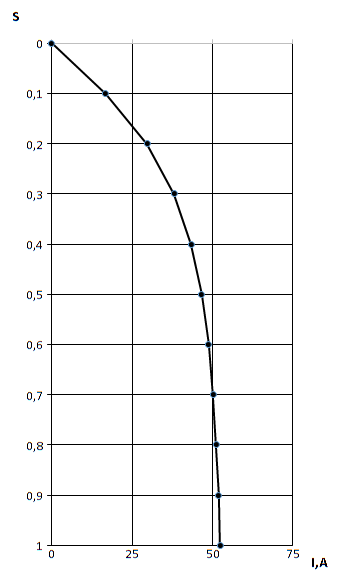 Рис. 3.3.2. Естественная электромеханические характеристики асинхронного двигателя с фазным ротором 3.4. Выбор способа пуска и регулирования скорости в пределах циклаПри исследовании переходных процессов в приводах с асинхронными двигателями пренебрегаем электромагнитными процессами, так как они протекают значительно быстрее электромеханических. Обычно для пуска асинхронного двигателя с фазным ротором используется реостатный пуск. Этот способ применяют при тяжелых условиях пуска, т.е. при большой нагрузке на валу. Для того чтобы осуществить реостатный пуск, в цепь ротора включается пусковой реостат, представляющий собой активное добавочное сопротивление, ступени которого перемыкаются регулировочными контактами. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко. Реостатные характеристики. Находим величину дополнительного сопротивления:  (3.24) (3.24)Определяем критическое скольжение реостатной механической характеристики:  (3.25) (3.25)Значения электромагнитного момента М при разных скольжениях s для реостатной механической характеристики получаем по упрощенной формуле Клосса: (3.26) Значения тока для реостатной электромеханической характеристики вычисляются по формуле: (3.27) (3.27)Результаты вычислений М и для значений s от 0 до 1 заносим в табл. 3.4.Таблица 3.4
По полученным значениям М и строим реостатную механическую характеристику (рис.3.4.1, кривая б) и реостатную электромеханическую характеристику (рис.3.4.2, кривая б).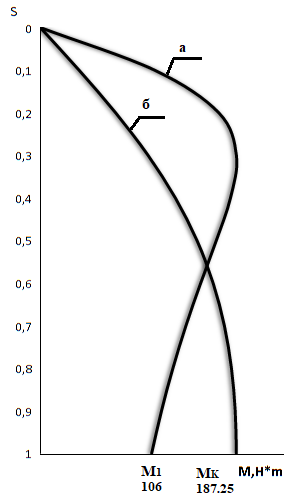 Рис. 3.4.1. Механические характеристики асинхронного двигателя с фазным ротором: а – естественная; б – реостатная. 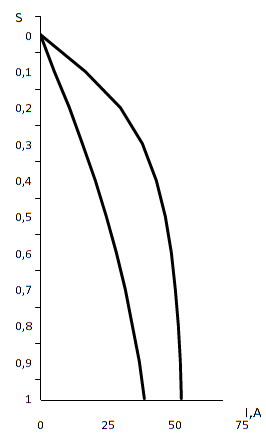 Рис. 3.4.2. Электромеханические характеристики асинхронного двигателя с фазным ротором: а – естественная; б – реостатная. Электромеханическая постоянная времени – это время, в течение которого привод с моментом инерции J разгонится до синхронной угловой скорости  под действием момента, равного максимальному под действием момента, равного максимальному  . . (3.28) (3.28)Потери энергии в двигателе вызывают нагрев его отдельных частей. Допустимый нагрев двигателя определяется нагревостойкостью применяемых изоляционных материалов. Чем больше нагревостойкость, тем при той же мощности меньше размеры двигателя или при тех же размерах можно увеличить его мощность. Проверка двигателей по нагреву в продолжительном режиме работы может проводиться методом средних потерь. При постоянной номинальной нагрузке на валу двигателя  , мощность потерь остаётся так же постоянной , мощность потерь остаётся так же постоянной  . .При изменяющейся нагрузке изменяется и мощность потерь. При расчёте методом средних потерь, сначала для, предварительно выбранного двигателя определяют номинальные потери  : : (3.30) (3.30)и потери  на каждом участке графика нагрузки. на каждом участке графика нагрузки. Затем находят средние потери по формуле:  (3.31) (3.31)Если средняя за цикл мощность потерь не превосходит номинальную мощность потерь (  ), то средняя температура перегрева не превышает допустимую ( ), то средняя температура перегрева не превышает допустимую ( ). ). (3.32) (3.32) (3.33) (3.33) (3.34) (3.34)  (3.35) (3.35) (3.36) (3.36)Условие проверки двигателя на нагрев выполняется, значит двигатель выбран правильно. На перегрузочную способность асинхронный двигатель с фазным ротором можно не проверять, т. к. условия перегрузки учитывались при построении пусковых электромеханических характеристик. 3.5. Выбор частотного преобразователяПосле того, как определены характеристики нагрузки и известны данные о двигателе, можно найти соответствующую мощность необходимого частотного преобразователя. Условия выбора частотного преобразователя: По току:  По полной мощности:  Определим динамический момент:  где t – время разгона двигателя до скорости nн (при легком пуске принимается до 2,5 с). Определим пусковую мощность двигателя:  где k – коэффициент искажения выходного тока преобразователя частоты (0,95-1,05). Мощность преобразователя частоты:  По этому значению подбираем преобразователь частоты Danfoss VLT MICRO DRIVE FC 51напряжением 380 В, рабочей мощностью 7,5 кВт, Номинальный ток 15,5 А В данной главе был спроектирован электрический привод производственного механизма с регулированием скорости двигателя изменением добавочного активного сопротивления в цепи обмотки ротора. Был выбран асинхронный двигатель с фазным ротором типа АК16058УЗ, рассчитаны и построены естественные и регулировочные механические и электромеханические характеристики двигателя, проведён расчёт переходных процессов, произведена проверка выбранного двигателя на нагрев. Выбранный двигатель удовлетворяет требованиям производственного механизма, так же был выбран частотный преобразователь Danfoss VLT MICRO DRIVE FC 51, который подходит по всем требования. |
 , кг∙м2
, кг∙м2 , В
, В , А
, А , Ом
, Ом , Ом
, Ом , о.е
, о.е , Ом
, Ом , Ом
, Ом