лаб.практикум СУХТП. Московский государственный университет прикладной биотехнологии
 Скачать 4.63 Mb. Скачать 4.63 Mb.
|

|
4. Порядок выполнения работы 1.Ознакомиться с содержанием методических указаний. 2.Начертить функциональную схему системы управления. 3.Запрограммировать верхний и нижний пределы сигнализатора уровня
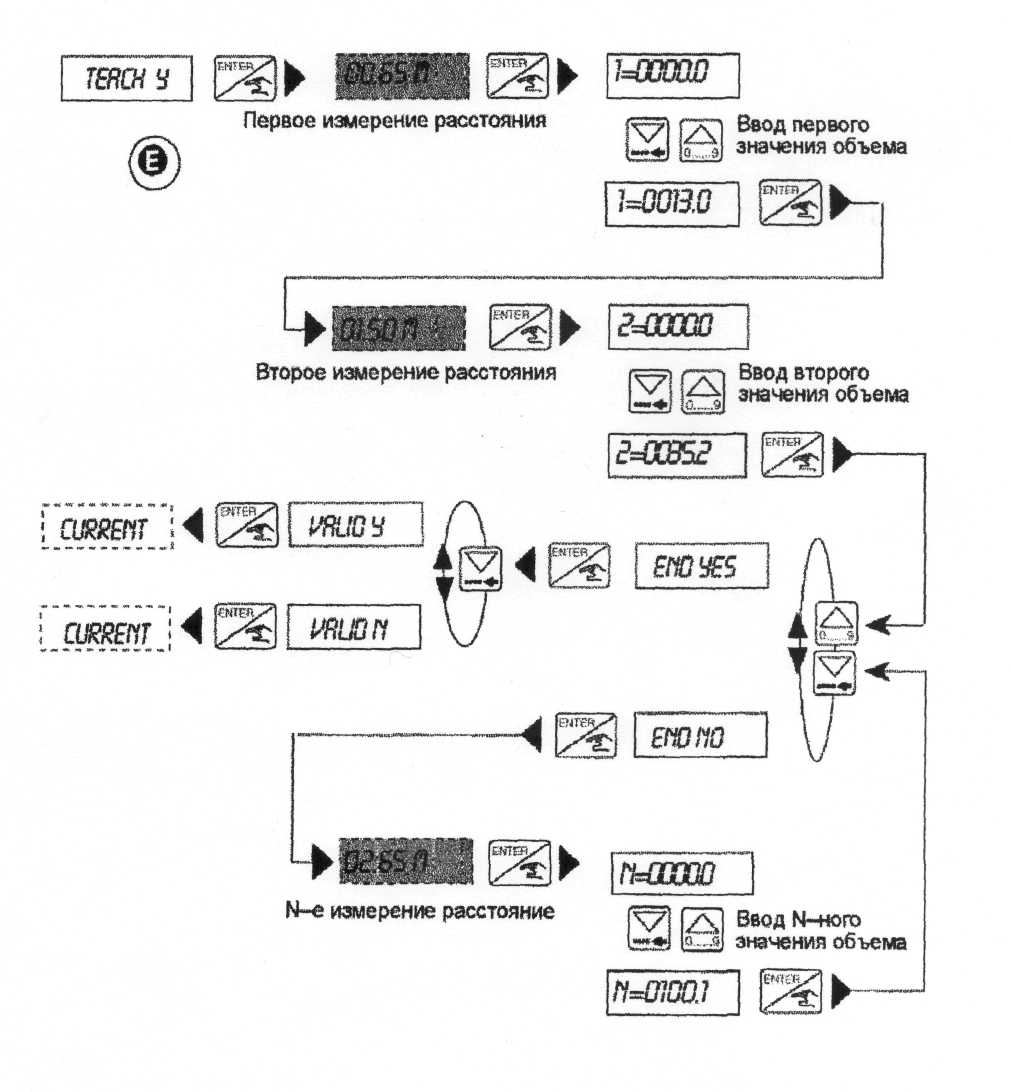 Рис. 34. Схема обучения датчика по объему Рис. 34. Схема обучения датчика по объему3.8. Лабораторная работа 8 Ознакомление с устройством и ручным управлением учебным робототехническим комплексом УРТК 1. Цель работы
2. Устройство и принцип действия робототехнического комплекса УРТК Лабораторная установка на базе учебного роботизированного комплекса (УРТК) для выполнения лабораторных работ состоит из манипуляционного робота (рисунок 35 а, в) с рабочим органом (РО), блока управления (рисунок 35 б) и ПЭВМ IBM PC , соединенную с сервером локальной сети . Робот может быть собран по одной из трех кинематических схем: робот с прямоугольной системой координат (рисунок 35 а); робот с цилиндрической системой координат (рисунок 35 в); робот базовой конструкции. 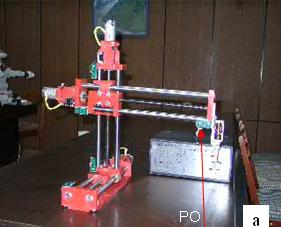   Рис.35. Манипуляционный робот (а, в) с блоком управления (б) Все роботы строятся на основе унифицированных мехатронных модулей (ММ): модуля линейного перемещения (рисунок 36 а, б); модуля вращения (рисунок 36 а); модуля смены захватного устройства; захватного устройства; устройства фрезеровки (рисунок 36 б).  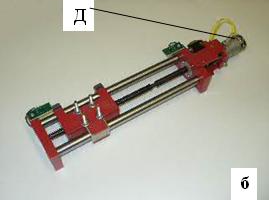 Рис.36. Модули линейного перемещения   Рис.37. Модуль вращения (а) и модуль с рабочим органом (б) Модули действуют согласованно в соответствии с заданной траекторией движения РО, которая формируется системой управления (СУ). Исполняют движение двигатели (Д). Движение рабочего органа в вертикальной и горизонтальной плоскостях обеспечивается модулями линейного перемещения (рисунок 36). Движение в горизонтальной плоскости дополнительно обеспечивает модуль вращения (рисунок 37) или модуль линейного перемещения. Исполнительным механизмом помимо двигателей является также электромагнитное реле. Рабочий орган является устройством захвата или (и) фрезеровки (Фр, рисунок 37б). Он устанавливается на ММ и может обеспечивать выполнение соответствующих технологических операций (степень W). В частности, захватное устройство (Зхв, на рисунке 37б и рисунке 38а, 38б) предназначено для захвата и удержания роботом небольших по массе деталей. 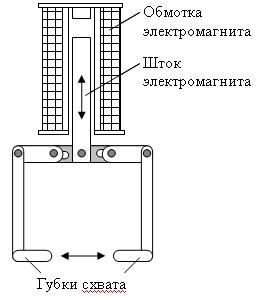 Рис. 38а. Конструкция захватного устройства  Рис. 38б. Общий вид захватного устройства  Рис. 38в. Модуль ориентации схвата Модуль при подаче рабочего напряжения с амплитудой 24 В на электромагнит захватного устройства его подвижный якорь втягивается и губки захватного устройства смыкаются. При снятии напряжения пружина, размещенная внутри электромагнита (на рисунке 38 не показана), вытолкнет шток и губки разомкнутся. Максимальное время, в течении которого захватное устройство может находиться во включенном состоянии, не должно превышать 5 мин. После этого оно должно находиться в выключенном состоянии не менее 15 мин. Так как робот содержит три ММ (степени подвижности X , Y , Z ), то управление движением его рабочего органа осуществляется по трем каналам управления. В каждом канале имеется управляемый электропривод на основе двигателя постоянного тока с независимым возбуждением типа МН-145А. По командам управления действие соответствующего ММ обеспечивается двигателем, ротор которого может вращаться в одну или другую сторону. Так для модулей линейного перемещения (рисунок 36) через механическую передачу вращение ротора соответствующего двигателя преобразуется в поступательное движение платформы ММ. 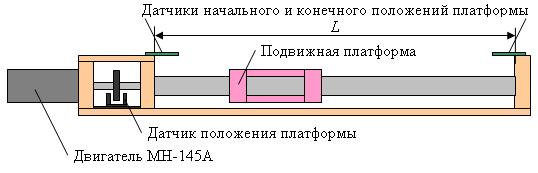 Рис. 39. Положение датчиков на ММ линейного перемещения На платформе степени X устанавливается ММ степени Z , а на платформе степени Z – ММ степени Y . Модули оснащены инкрементным датчиком положения и двумя концевыми герконовыми датчиками. Длина L пути платформы (см. рисунок 39), равная 290 мм (для некоторых ММ L =390 мм), является расстоянием между концевыми датчиками (начальным и конечным). Инкрементный датчик состоит из непрозрачного диска с прорезями (рисунок 40). Он установлен на вал двигателя и в процессе вращения ротора двигателя перекрывает световой поток от источника излучения к приемнику. На выходе приемника излучения датчика формируются импульсы прямоугольной формы (рисунок 41). Они используются для определения положения подвижной части ММ. Состояние датчика положения отображается на передней панели СУ (см. рисунок 35) светодиодным индикатором, обозначенным как «Датчик 0». 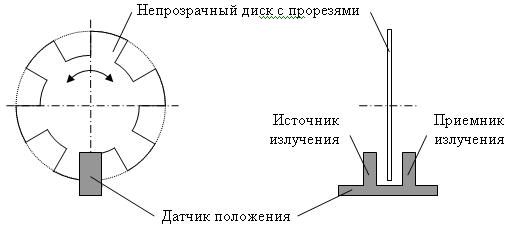 Рис. 40. Датчик положения ММ линейного перемещения 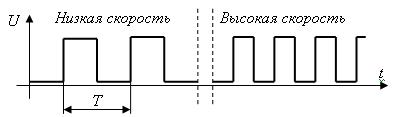 Рис. 41. Временная диаграмма работы датчиков положения Индикатор, обозначенный как «Датчик 1», здесь не используется и постоянно находится во включенном состоянии. Скорость v вращения вала двигателя для датчика, имеющего 6 прорезей, может быть определена по формуле: При скорости вращения вала двигателя 120 об/мин частота следования импульсов на выходе датчика положения составляет 12 Гц. Если на модуле установить два импульсных датчика, то можно определять не только положение подвижной части, но и направление ее перемещения, а также можно повысить точность определения положения. Скорость вращения выходного вала редуктора составляет не менее 120 об/мин. Если команда на привод не поступает, то двигатель привода отключен и его ротор не вращается. Во время работы двигателя температура его корпуса может достигать 60ºС. В процессе работы пользователь должен контролировать температуру двигателей и при их нагреве сверх указанной температуры отключить питание двигателей не менее чем на 15 мин. СУ автоматизирует и осуществляет функции оперативного контроля за состоянием робота и управления им. Система управления является аппаратно-программным комплексом, реализованным на двух уровнях (рисунок 42). 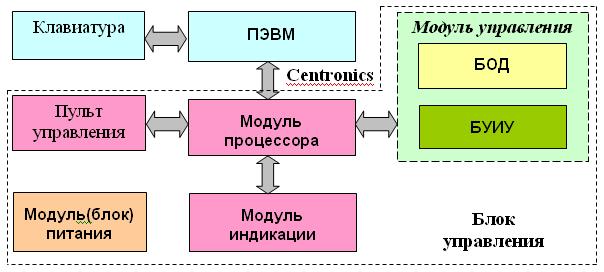 Рис.42. Система управления УРТК На верхнем уровне часть функций осуществляет ПЭВМ, программа которой на основании текущей информации о состоянии робота, полученной от процессорного модуля блока управления, и алгоритма движения РО, формирует для блока управления задания каждому модулю. Здесь может быть использован персональный компьютер, совместимый с IBM PC и имеющий процессор типа Intel 80386 DX 40 (если используется программное обеспечение, разработанное для операционной системы MS DOS) или более производительный (если, например, используется операционная система MS Windows или пользователь планирует разрабатывать прикладное программное обеспечение на современных объектно-ориентированных языках программирования). На нижнем уровне управления другую часть функций оперативного контроля и управления осуществляет блок управления ( БУ ). Он имеет указанный на рис. 8 состав элементов (модулей), которые решают разные задачи. Например, модуль процессора и модуль управления в совокупности являются аппаратно-программной основой трех электроприводов (по числу степеней подвижности) соответствующих каналов управления. Эти модули обеспечивают управление состоянием приводов робота. В модуле управления также производится первичная обработка показаний датчиков, расположенных на роботе. Процессорный модуль может подключаться к ПЭВМ с помощью параллельного ( Centronis ) или (и) последовательного ( RS -232) интерфейса. Рабочая зона - это пространство, в котором находится рабочий орган робота (в данном случае схват) при всех возможных положениях манипулятора. Рабочее пространство манипулятора - часть физического пространства, в котором может находиться робот при функционировании манипулятора.
Начальное положение: Xr(0), Yr(1), Zr(2) Конечное положение: Xl(0), Yl(1), Zl(2) Сомкнуть захват: D1 Пробел – стоп/пуск, указатели клавиатуры – перемещение между командами. 5. Контрольные вопросы 1. Что входит в состав роботизированного комплекса?
4. Рекомендуемая литература Основная литература 1. Бесекерский В.А. Теория систем автоматического управления. Учебное пособие/В.А.Бесекерский, Е.П.Попов. – 4-е изд., перераб. И доп. – СПб. Профессия, 2003. – 752 с. 2. Благовещенская М.М Информационные технологии систем управления технологическими процессами. Учебник для вузов/М.М. Благовещенская, Л.А. Злобин. -М.; Высшая школа, 2005.-768с. Дополнительная литература
Приложение 1 Таблица 1 - 1 Градуировочная таблица платиновых термометров сопротивления Обозначение градуировки: гр.21 (R0=46 Ом) Сопротивление Rt при температуре от -200 до +650 0С
Приложение 1 Таблица 1 - 2 Градуировочная таблица платиновых термометров сопротивления Обозначение градуировки: гр.22 (R0=100 Ом) Сопротивление Rt при температуре от -200 до +650 0С
Приложение 1 Таблица 1 - 3 Градуировочная таблица платиновых термометров сопротивления Обозначение градуировки: гр.23 (R0=53 Ом) Сопротивление Rt при температуре от -50 до +180 0С
Таблица 1 - 4 Градуировочная таблица термометра сопротивления Pt100
Приложение 2 Градуировочная таблица для термопары (согласно ГОСТ 3044-61 и ГОСТ 6071-51, приложение 1)
*- соответствует градуировке «L» (ГОСТ 3044-84). Содержание
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||