проектирование электропривода. 3 лабораторная работа по проектированию. Необходимо рассчитать параметры регулятора тока, регулятора скорости и регулятора положения
 Скачать 169.46 Kb. Скачать 169.46 Kb.
|

|
1. Цель работы. - Необходимо рассчитать параметры регулятора тока, регулятора скорости и регулятора положения. 2. Задание Таблица 1 – Данные варианта
Таблица 2 – Паспортные данные двигателя
Электромагнитная постоянная времени:  Электромеханическая постоянная времени:  3. Ход работы. 3.2 Расчет параметров контура тока Передаточная функция разомкнутого контура тока преобразователя и якорной цепи двигателя:  В качестве регулятора тока выбирает ПИ-регулятор, его передаточная функция:  Передаточная функция разомкнутого контура тока:  Принимаем T0 = Tэ:  Передаточная функция замкнутого токового контура:  Требуемая постоянная времени регулятора тока:  Параметры ПИ – регулятора:   Зададимся величиной емкости конденсатора цепи обратной связи регулятора тока C=0,1 мкФ. Сопротивление резистора R1:  Сопротивление резистора R0:  Принимаем следующие значения резисторов: R1 = 4.5 МОм, Rос = 4,55 кОм. Передаточная функция ПИ– регулятора:  где  Передаточная функция регулятора тока примет вид:  При таком регуляторе тока передаточная функция замкнутой по току системы:  Перерегулирование ϭ = 4,38 %, время переходного процесса t1 = 0.011 Произведем моделирование системы: 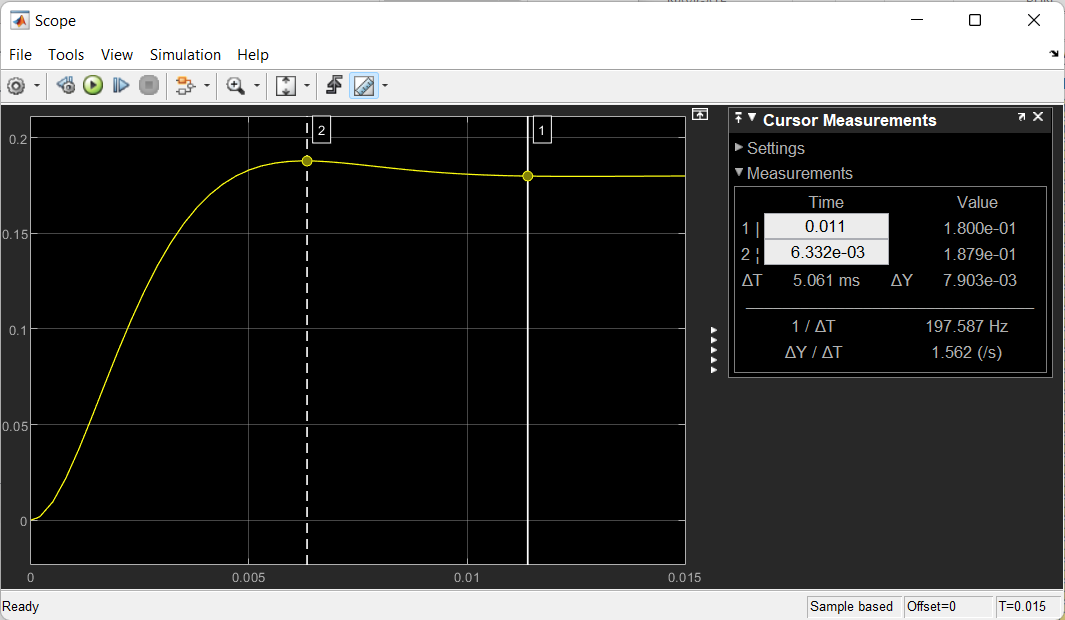 Рисунок 1 – Переходный процесс замкнутой по току системы Как видно из приведенного выше рисунка требуемое качество переходного процесса достигнуто: tпер≈0.074 с, перерегулирование ≈ 4,8 %. 3.3 Расчет параметров скоростного контура. Коэффициент усиления регулятора:  Примем R1 = 100 кОм, то Rос = 18912 кОм., принимаем Rос = 18.9 МОм, Постоянную времени интегральной части T0 примем равной 0,008 с, тогда ёмкость равна:  Передаточная функция ПИ– регулятора скорости:  Передаточная функция разомкнутой по скорости системы с регулятором скорости:  Передаточная функция замкнутой по скорости системы с датчиком скорости в цепи обратной связи, коэффициент передачи которого kΩ:  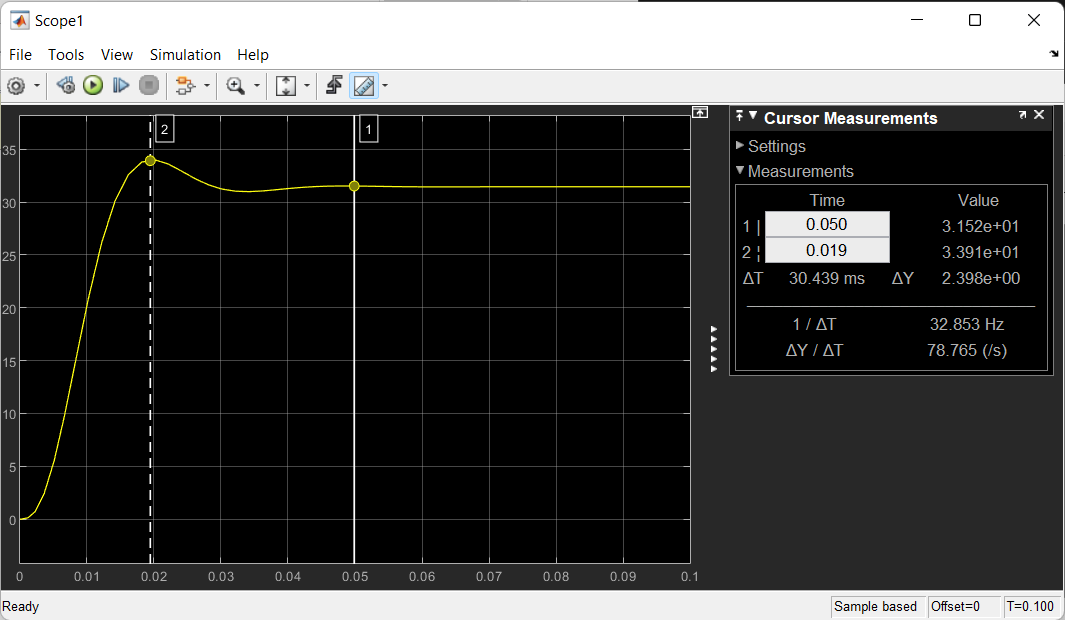 Рисунок 2 – Переходный процесс замкнутой по скорости системы Как видно из приведенного выше рисунка: tпер≈0.05 с, перерегулирование ≈ 7.5 %. 3.4 Расчет параметров контура положения. Передаточная функция разомкнутой по положению системы без регулятора положения:   Желаемая передаточная функция разомкнутого контура положения с последовательно включенным регулятором положения:   Передаточная функция регулятора положения:  Передаточная функция замкнутого контура положения с регулятором положения:   Рисунок 4 – Переходная характеристика системы замкнутой по положению Как видно из представленного выше рисунка, перерегулирование составляет 6%, а время переходного процесса – 0,4 с. 4 Вывод. В ходе выполнения данной лабораторной работы был рассчитан трехконтурный регулятор тока, скорости и положения. Были рассчитаны качественные характеристики переходных процессов: |
 pm,
pm,