Диплом. Обоснование выбора датчиков проектируемого прибора
 Скачать 2.23 Mb. Скачать 2.23 Mb.
|

Датчики перемещения с цифровым кодированиемВ датчиках перемещения с цифровым кодированием перемещение преобразуется с помощью кодирующей плоской пластины, а изменение угла - с помощью такого же кодирующего диска. Перемещение или поворот фиксируется в этих датчиках непосредственно в виде электрических сигналов в двоичной (рис.4.а) или десятичной системе (рис.4,б), Для устранения ошибок используют V-логику с дублированием считывания или одноступенчатые специальные коды. При использовании способов измерения с кодированием требуются большие затраты на приборы для считывания и обработки, которые могут различить при n дорожках 2n различных положений. Смещение нуля возможно только путем перемещения датчика. Эти способы используются в основном при очень жестких требованиях к точности, в самолето - и турбиностроении, при обеспечении безопасности полетов летательных и космических аппаратов и в ядерных реакторах. Наряду с непосредственным измерением поступательных перемещений с помощью системы с линейным масштабом имеются устройства для косвенного измерение с преобразованием во вращательное движение. При этом измеряемое перемещение преобразуется с помощью механических устройств (планка с зубьями или шпиндель с винтовой нарезкой и гайкой) в угол поворота и затем измеряется датчиком поворота. Эти устройства используются на производстве в станках с цифровым управлением. [ 2 ] Другие способы измерения перемещенийДатчики перемещения с емкостными чувствительными элементами, включенными в колебательный контур, или с дифференциальными конденсаторами и измерительным мостом имеют номинальный диапазон измеряемых перемещений 0-2 мм, наибольшая их погрешность не превышает 1,5 мкм или же диапазон 0-20 мм при погрешности не более 2 мкм. Разрешение может достигать 0,02 мкм, а рабочий диапазон частот составляет 0--100 кГц. В лазерных устройствах для измерения расстояний используется регистрация времени распространения света от лазера - излучателя до объекта - отражателя и фотодиода-приемника. Режим работы импульсный (несколько сотен лазерных импульсов в секунду). Диапазон измеряемых расстояний и составляет, например от 35 до 5 м, относительная погрешность не более 10-4. Датчики перемещения могут быть использованы в качестве чувствительных элементов при измерениях многих других величин, которые связаны с изменением расстояния. [ 2 ] Потенциометрические резистивные преобразователи.Резистивный проволочный потенциометр со скользящим контактом - один из наиболее простых и эффективных преобразователей перемещения. Для его использования нужно лишь соединить скользящий контакт (движок) с движущимся объектом, а остальную часть потенциометра закрепить неподвижно. На рис. 5 показаны потенциометрические преобразователи, предназначенные для измерения как линейных (трансляционных), так и угловых перемещений. В идеальном случае между выходным сигналом преобразователя и перемещением (любого типа) существует линейная связь. 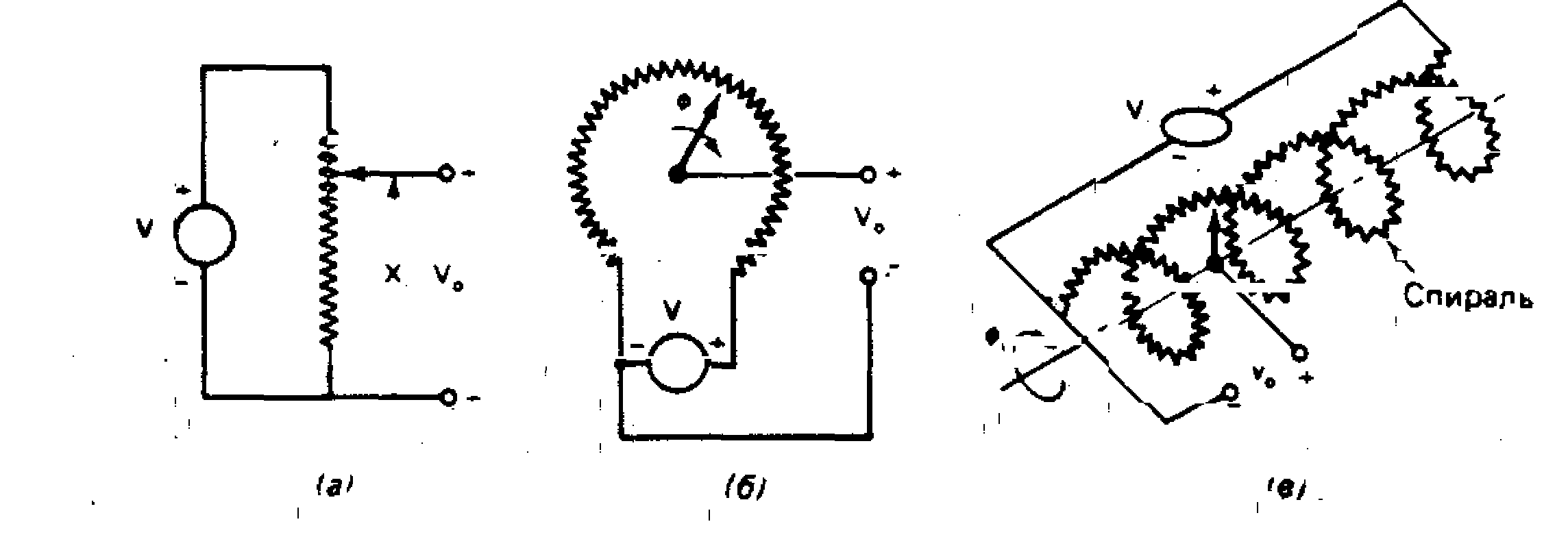 Рис. 5 Три типа потенциометрических преобразователей для измерения перемещении: (а) линейный (трансляционный); (б) однооборотный; (в) многооборотный. Применение тщательно изготовленных проволочных потенциометров гарантирует малую нелинейность преобразования. Как видно из рис.5, нелинейность, обусловленная конечным сопротивлением нагрузки потенциометрического преобразователя, возрастает при уменьшении этого сопротивления. Это влияние можно ослабить путём шунтирования верхнего плеча потенциометра резистором с сопротивлением Rm = RL. Характеристика преобразователя для этого случая показана пунктирной линией на рис.6(б); при Х=0,5Хm погрешность, связанная с нелинейностью, обращается в нуль. 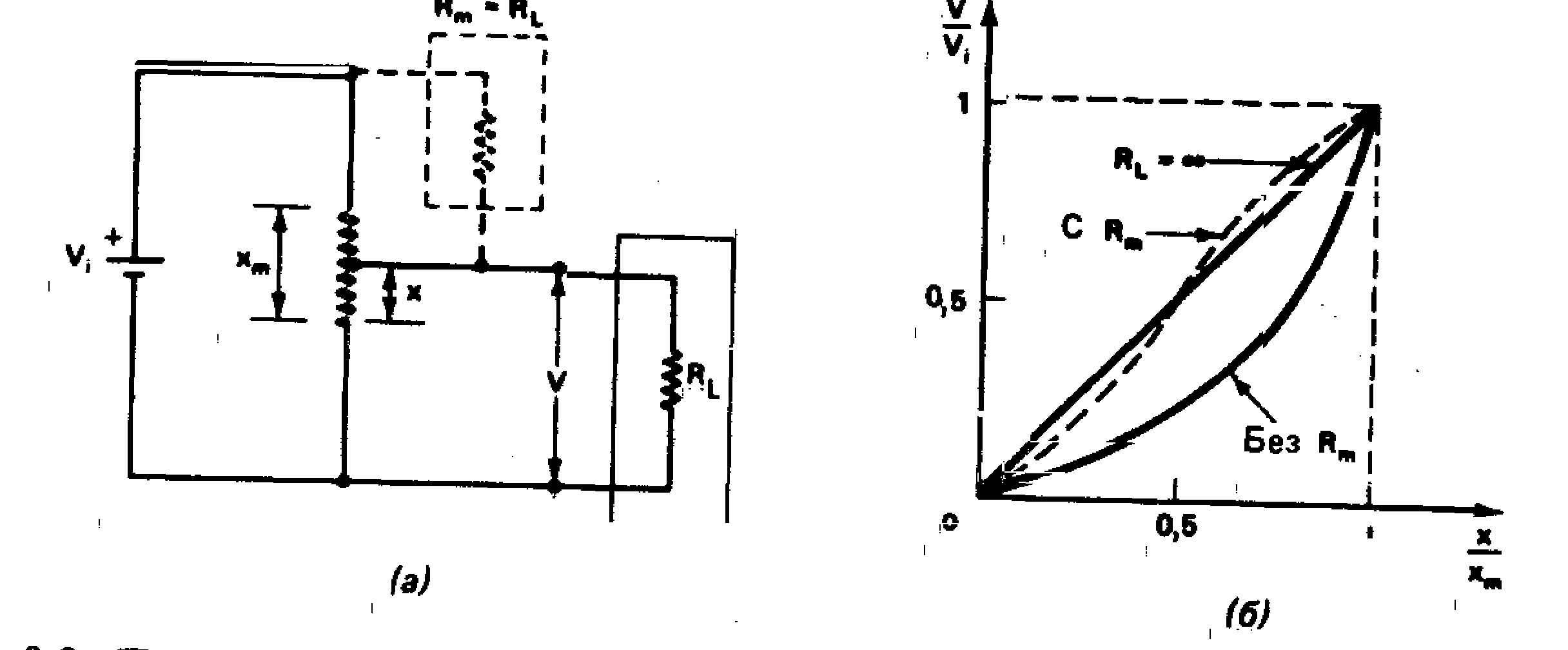 Рис.6 Потенциометрический резистивный преобразователь. (а) Принципиальная схема. Штриховыми линиями показан способ включения шунтирующего резистора. (б) Сравнение выходных сигналов преобразователя с шунтирующим резистором и без него. Рис.6 Потенциометрический резистивный преобразователь. (а) Принципиальная схема. Штриховыми линиями показан способ включения шунтирующего резистора. (б) Сравнение выходных сигналов преобразователя с шунтирующим резистором и без него.Движок потенциометра контактирует с отдельными витками на катушке. Поэтому выходной сигнал (напряжение) преобразователя изменяется не непрерывно, а в виде перемежающихся малых больших скачков (рис.6). Малый скачок имеет место, когда движок замыкает два соседних витка, как показано на рис. 7; большой скачок соответствует моменту перехода движка к следующему витку и размыкает два соседних витка, как показано на рис. 8; большой скачок соответствует моменту перехода движка к следующему витку и размыкания контакта с предыдущим витком. Таким образом, разрешение этого преобразователя зависит от диаметра намоточного провода и может быть улучшено путем использования более тонкого провода. Для потенциометра с плотностью намотки 50 витков на миллиметр, что близко к практическому пределу, предельное разрешение составляет 20 мкм. [ 1 ]  Рис.7 Скачкообразная зависимость выходного напряжения преобразователя решения потенциометрического (катушечного) типа от перемещения движка потенциометра. 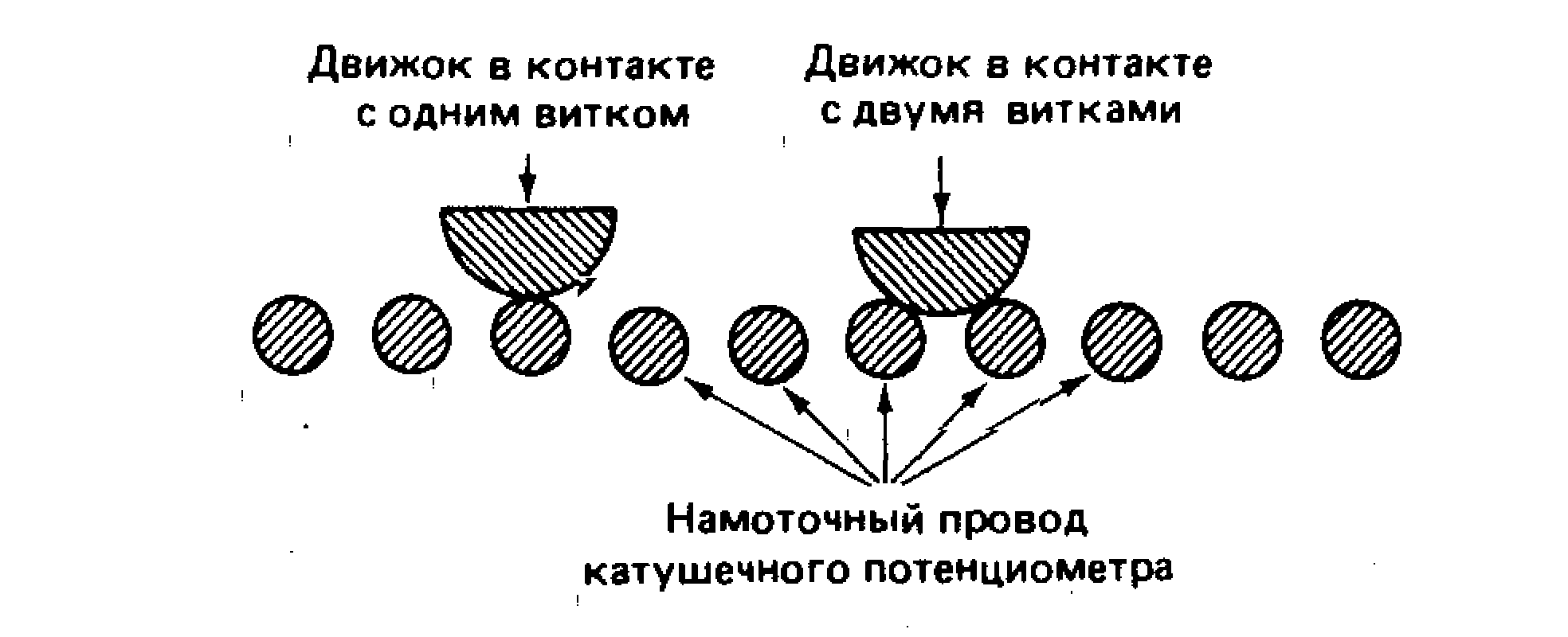 Рис. 8. Схема, поясняющая скачкообразный характер изменения выходного напряжения катушечного преобразователя. |