Обрунтування необхідності підвищення показників якості функціонування систем придушення пасивних
 Скачать 125.13 Kb. Скачать 125.13 Kb.
|

|
ЗМІСТ Перелік умовних позначень 4 Вступ 5 Розділ 1 Обґрунтування необхідності підвищення показників якості функціонування систем придушення пасивних перешкод 11 1.1. Аналіз існуючих систем придушення пасивних перешкод, їх переваги і недоліки. 11 1.2. Обґрунтування необхідності забезпечення інваріантності перешкодозахищеності РЛС від часу огляду 22 1.3. Постановка завдання дослідження 27 1.4. Обґрунтування вибору зондуючого сигналу 30 1.5. Переваги та недоліки радіолокаційних станцій з ЛЧМ сигналами 34 Висновки 37 Розділ 2 Синтез алгоритму обробки широкосмугових багаточастотних радіолокаційних сигналів 39 2.1. Використання двочастотних ЛЧМ сигналів для компенсації пасивних перешкод 39 2.2. Дослідження характеристик двочастотного ЛЧМ сигналу 64 2.2.1. Кореляційні властивості сигналу 64 2.2.2. Спектральні властивості сигналу 72 2.3. Розробка алгоритму вимірювання дальності і швидкості повітряних цілей 78 Висновки 91 Розділ 3 Оцінка ефективності алгоритму обробки складних багаточастотних радіолокаційних сигналів 94 3.1. Ціль і завдання моделювання 94 3.2. Розробка математичної моделі системи СДЦ 95 3.2.1. Модель алгоритму придушення пасивних перешкод, заснованого на когерентно-імпульсному методі СДЦ 95 3.2.2. Модель каналу придушення пасивних перешкод при використанні двочастотного ЛЧМ сигналу 106 3.3. Аналіз результатів моделювання 114 Висновки 128 Загальний висновок 129 Список використаних джерел 132 Додатки 137 ПЕРЕЛІК УМОВНИХ ПОЗНАЧЕНЬ АКФ автокореляційна функція БР балістична ракета БСВН безпілотні засоби повітряного нападу ОВТ озброєння і військова техніка ДН діаграма спрямованості ДПЛА дистанційно пілотований літальний апарат ЗРК зенітно - ракетний комплекс ЗС зондує сигнал КР крилата ракета ЛЧМ лінійна частотна модуляція НЛЦ низьколітаюча ціль ППО протиповітряна оборона ПРР протирадіолокайціна ракета РЛС радіолокаційна станція РТР радіотехнічна розвідка РТС радіотехнічна система СВ сухопутні війська СВН засоби повітряного нападу СДЦ селекція рухомих цілей ТТХ тактико - технічні характеристики УАБ керована авіаційна бомба ППЧ підсилювач проміжної частоти ЦВМ цифрова обчислювальна машина ЧПК черезперіодна компенсація ЕПР ефективна площа розсіювання ВСТУП Відмінною особливістю нашого часу є процес зниження напруженості у відносинах між різними державами і створення системи колективної безпеки. Однак, прогрес людства з точки зору моралі і законності ще не досяг такого рівня, щоб держава могла відмовитися від армії. Незалежність самого існування держави Україна неможлива без забезпечення її обороноздатності. Незважаючи на труднощі економічного розвитку України багато уваги приділяється питанням реформування Збройних Сил, модернізації наявних на озброєнні і створення нових, перспективних систем зброї, переважно оборонного характеру, в тому числі і для оснащення військ ППО. Актуальність теми. В сучасних умовах відбувається подальший розвиток і вдосконалення засобів повітряно-космічного нападу. Досвід останніх локальних конфліктів показує, що ці кошти знаходять все більш широке застосування і часто виступають вирішальним фактором, що визначає хід і результат військового конфлікту. "Основною формою бойових дій авіації в конфліктах і війнах без застосування зброї масового ураження є повітряна наступальна операція, визначальним елементом якої вважається перший масований удар. Він повинен бути раптовим, точним і настільки потужним, щоб виключити використання противником зброї масового ураження і балістичних ракет, а також створити передумови для виведення з ладу об'єктів державного і військового управління, завоювання переваги в повітрі, заборони висування других ешелонів, придушення системи ППО "[1]. Для ефективного придушення системи ППО, крім вогневого придушення, необхідно порушити роботу радіоелектронних засобів противника, що досягається за рахунок постановки перешкод, як активних, так і пасивних. В ході одного з останніх конфліктів в зоні Перської затоки постановка пасивних перешкод здійснювалася не тільки спеціальними літаками-постановниками, а й кожним літаком ударної групи. При атаці на наземний об'єкт і при виході з атаки вистрілює хмару дипольних відбивачів, тим самим унеможливлюючи роботу наземних радіолокаційних станцій. При сучасному рівні розвитку засобів повітряно-космічного нападу, коли ціль знаходиться в зоні дії ППО дуже нетривалий проміжок часу, все більш важливе значення набуває здатність системи ППО швидко позбутися пасивних перешкод і зробити виявлення цілі. В даний час існують РЛС, які за своїми потенційними можливостям здатні зробити виявлення по лише одному, відбитому від цілі сигналу. Але при постановці противником пасивних перешкод для ефективного їх придушення необхідно збільшувати час огляду кожної точки простору, що значно знижує можливості ППО по знищенню повітряних цілей. Таким чином, виникає протиріччя між вимогою зменшення часу огляду з одного боку, і ефективністю придушення пасивних перешкод - з іншого. Одним з напрямків вирішення цієї проблеми є методи придушення пасивних перешкод, засновані на використанні властивостей багаточастотних сигналів з різними видами модуляції. Таким чином об'єктом досліджень виступає Багаточастотна радіолокація, предметом - багаточастотний сигнал з модуляцією складових. За теорією і техніці систем зв'язку зі складними сигналами написано багато книг, статей, оглядів, відомості про яких можна знайти в джерелах [2-12]. Багаточастотна радіолокація є порівняно новим напрямком в сучасній радіотехніці, основні принципи якої викладені в літературі [13-19]. У даних роботах досить висвітлені питання, пов'язані з виявленням і супроводом повітряних цілей РЛС зі складними сигналами. Однак, недостатньо досліджені питання використання даних типів сигналів в інтересах боротьби з пасивними перешкодами великої інтенсивності. Таким чином, завдання дослідження можливості використання багаточастотних сигналів з різними видами модуляції складових має актуальне наукове і практичне значення. Зв'язок роботи з науковими програмами, планами, темами. Дослідження проводилися в рамках науково-дослідної роботи "Обрій-2", що проводиться ЦНДІ МО України, а також відповідно до плану наукової роботи факультету військової підготовки НТУУ "КПІ" та КВЗРІУ імені С. М. Кірова. Ціль і завдання дослідження. Метою роботи є підвищення перешкодозахищеності РЛС від пасивних перешкод при незмінному часу огляду простору за рахунок використання складних багаточастотних сигналів. Для досягнення поставленої цілі в роботі вирішувалися наступні завдання: аналіз існуючих методів боротьби з пасивними перешкодами і виявлення притаманних їм недоліків; аналіз існуючих радіолокаційних сигналів і обґрунтування вибору зондуючого сигналу; аналіз радіолокаційних систем, які застосовують ЛЧМ сигнали, і обґрунтування можливості використання багаточастотних сигналів з лінійною частотною модуляцією складових для придушення пасивних перешкод; розробка методу придушення пасивних перешкод, заснованого на використанні властивостей двочастотного ЛЧМ сигналу; синтез квазіоптимального алгоритму обробки складних багаточастотних радіолокаційних сигналів; розробка математичної моделі синтезованого алгоритму обробки; розробка імітаційної моделі каналу обробки вхідного сигналу; оцінка перешкодозахищеності синтезованого алгоритму придушення пасивних перешкод. Основні результати роботи отримані на основі системного підходу з використанням методів теорії ймовірностей і математичної статистики, теорії складних сигналів, теорії радіоелектронної боротьби, а також теорії математичного моделювання на ЦВМ. Наукова новизна отриманих результатів. Вперше отримані наступні наукові результати: метод придушення пасивних перешкод, заснований на використанні двочастотного ЛЧМ сигналу, що дозволяє здійснювати придушення пасивних перешкод великої інтенсивності; результати досліджень кореляційної функції і спектра двочастотного ЛЧМ сигналу при різних співвідношеннях між несучими частотами складових, які дозволяють зробити висновок про можливість використання таких сигналів в інтересах придушення пасивних перешкод без зниження якості вимірювання дальності і швидкості повітряних цілей; алгоритм обробки, який реалізує метод придушення пасивних перешкод при використанні двочастотного ЛЧМ сигналу і дозволяє здійснювати компенсацію пасивних перешкод з коефіцієнтом придушення рівним динамічному діапазону приймача без збільшення часу огляду повітряного простору; результати оцінки перешкодозахищеності РЛС із запропонованим алгоритмом; Практичне значення отриманих результатів. Отримані в ході досліджень результати дозволяють зробити висновок про можливість використання розробленого алгоритму як для модернізації існуючих РЛС виявлення, так і при розробці перспективних радіолокаційних засобів розвідки повітряних цілей. Для модернізації буде потрібно робити значні зміни в передавальної і приймальні системах РЛС. При цьому ступінь складності необхідних робіт залежить від функціонального побудови конкретної радіотехнічної системи. Наприклад, для вироби 1РЛ128Д потрібно частково змінити структуру приймально-передавального тракту, а також ввести в його склад пристрій формування і стиснення складних сигналів. Результати дисертації реалізовані в Центральному науково-дослідному інституті МО України (в / ч А-0202) при обґрунтуванні основних напрямків розвитку ОВТ Сил ППО України і військ ППО СВ до 2010 року, що підтверджується відповідним актом реалізації. Апробація результатів дисертації. Результати досліджень доповідалися на науково-технічних конференціях і семінарах, що проводяться в ЖВУРЕ (1994р.), ОІСВ (1995р). Публікації. Матеріали дисертаційної роботи опубліковані в трьох науково-технічних статтях, одному звіті науково-дослідницької роботи, чотирьох тезах доповідей на науково-технічних конференціях і семінарах. РОЗДІЛ 1 ОБҐРУНТУВАННЯ НЕОБХІДНОСТІ ПІДВИЩЕННЯ ПОКАЗНИКІВ ЯКОСТІ ФУНКЦІОНУВАННЯ СИСТЕМ ПРИДУШЕННЯ ПАСИВНИХ ЗАВАД 1.1. Аналіз існуючих систем придушення пасивних перешкод, їх переваги і недоліки Пасивні перешкоди утворюються внаслідок відображення радіохвиль від безлічі елементарних відбивачів, розподілених по поверхні або обсягу [20]. Характерні приклади об'єктів, що створюють пасивну перешкоду - це фон місцевості, на якій розташована ціль, водна поверхня, гідрометеори (дощ, град, сніг та ін.), дипольні відбивачі. Зазначені джерела займають в просторі значний обсяг, як правило перевищує імпульсний обсяг РТС, і відбиті від них сигнали маскують корисні сигнали, тобто є маскують. Імітуючі пасивні перешкоди створюються відбивачами від точкових джерел: кутових відбивачів, лінз Люнеберга і ін. Так як маскують пасивні перешкоди найбільш часто зустрічаються на практиці, то при подальшому розгляді питання під терміном "пасивні перешкоди" будемо розуміти саме маскують пасивні перешкоди. Заважаючий вплив пасивних перешкод проявляється в придушенні корисних сигналів і маскування спостерігається цілі [21,22]. Інтенсивність пасивних перешкод може значно перевищувати рівень власних шумів приймача. В результаті виникають перевантаження в тих елементах радіолокаційного тракту, які мають обмежений динамічний діапазон. Втрати сигналу відбуваються в першу чергу в кінцевих елементах радіолокаційного тракту: в останніх каскадах ППЧ, у відеопідсилювачі, в індикаторному пристрої. Корисний сигнал можна втратити і при відсутності перевантажень, так як виявити його на тлі великого числа заважають відбивачів важко. Завдання захисту РТС від пасивних перешкод може бути вирішена наступними методами. 1. Прямі методи, при яких параметри РЛС вибираються з умови поліпшення співвідношення між корисним сигналом і перешкодою. Прямі методи полягають в наступному: скорочення імпульсного обсягу РТС (аж до розмірів цілі) за рахунок звуження діаграми спрямованості антени в обох площинах і зменшення тривалості сигналу; вибір поляризації зондуючого сигналу, що забезпечує мінімальний рівень відображень від джерел пасивних перешкод; формування провалів в діаграмі спрямованості антени в напрямку на місцеві цілі. 2. Спеціальні регулювання в приймальному тракті, що дозволяють підвищити його динамічний діапазон і зменшити ймовірність перевантаження. 3. Придушення пасивної перешкоди при обробці відбитих сигналів. Ці методи засновані на використанні додаткової апріорної інформації про цілі та джерела перешкод. Комбінації тих чи інших схем регулювання посилення приймача ефективні для певних умов спостереження, і можуть розглядатися тільки як допоміжний засіб боротьби з пасивними перешкодами. Ч-Тобто, спеціальні регулювання вирішують приватні завдання підвищення перешкодозахищеності. Прямі методи боротьби з пасивними перешкодами, навпаки, універсальні, але важко реалізувати з тактичних і конструктивних міркувань [23]. В результаті найбільш ефективними для боротьби з пасивними перешкодами практично виявляються методи селекції. В основу цих методів можуть бути покладені різні відомі ознаки сигналів. Найбільшу популярність здобули два види ознак: відмінність допплерівських зрушень корисного і що заважаючого сигналів при спостереженні об'єктів, що рухаються; залежність поляризації відбитих хвиль від геометричних параметрів цілі. Вибором поляризації зондуючого сигналу вдається значно послабити відображення від гідрометеорів. Останнім часом використовуються хвилі з еліптичної поляризацією і антени з регульованими поляризаційними характеристиками. При цьому поляризаційні характеристики вибираються з умови найбільшого ослаблення відображень від гідрометеорів і найкращою спостережливості корисних сигналів. В даний час на практиці найбільш ефективними є методи придушення пасивних перешкод, засновані на частотних відмінності сигналів, відбитих від рухомих цілей і нерухомих (малорухомих) пасивних перешкод. З точки зору практичної реалізації допплерівського методу придушення пасивних перешкод можна виділити наступні типи РЛС: доплерівські; імпульсно-доплерівські; когерентно-імпульсні; багаточастотні. Розглянемо перераховані РЛС. 1 .Допплерівській радіолокатор [24]. Основні недоліки: не дозволяє визначати дальність до цілі; якщо застосовується загальна приймально-передавальна антена, то виникають труднощі розв'язки трактів. Тому, як правило, використовуються роздільні антени для передачі і прийому; швидкість огляду простору допплерівським радіолокатором обмежена. Це обумовлено тим, що для селекції сигналів рухомій цілі і нерухомого об'єкту їх спектри не повинні перекриватися. Тобто, має виконуватися умова  (1.1) (1.1) - час опромінення цілі; - час опромінення цілі; - значення частоти Доплера. - значення частоти Доплера.Обмеження в швидкості огляду призводить до обмеження темпу видачі даних про мету. У міру зближення цілі великих розмірів з радіолокатором її кутовий розмір безперервно зростає. Оскільки напрямок на окремі точки і відносні радіальні швидкості розрізняються між собою, спостерігається широкий спектр допплерівських частот. Освіта биття між складовими такого сигналу призводить до флуктуацій відбитого сигналу, що викликає істотне утруднення при вимірюванні швидкості. Перераховані недоліки звужують сферу застосування допплерівських радіолокаторів. Однак, коли повна інформація про цілі не потрібна, ці радіолокатори можна використовувати в силу своєї простоти і високої якості селекції за швидкістю, особливо в умовах сильних перешкод від місцевих предметів. 2. Імпульсно-допплерівська РЛС [25,26]. У порівнянні з імпульсними системами імпульсно-допплерівські РЛС володіють тими ж привілеями, що і чисто допплерівській радіолокатор (тобто забезпечують кращу можливість селекції рухомих цілей), але позбавлені їх основного недоліку, так як випромінювання і прийом сигналів рознесені в часі. Крім того, вилучення інформації здійснюється шляхом аналізу однієї складової спектра прийнятого когерентно-імпульсного сигналу малої шпаруватості (тобто так само, як в чисто допплерівських РЛС), що показано на малюнку 1.1. де: а) спектр сигналу, відбитого від нерухомій цілі; б) спектр сигналу, відбитого від рухомої цілі; в) амплітудно-частотна характеристика фільтра, що виділяє сигнал рухомій цілі. Імпульсно-допплерівським РЛС притаманні такі недоліки: швидкість огляду простору обмежена, як і в випадку чисто допплерівською РЛС, так як ширина складової спектра дорівнює:  (1.2) (1.2)де  - тривалість пачки прийнятих сигналів; - тривалість пачки прийнятих сигналів;для усунення ефекту сліпих швидкостей необхідно здійснювати вобуляцію періодом повторення імпульсів, що 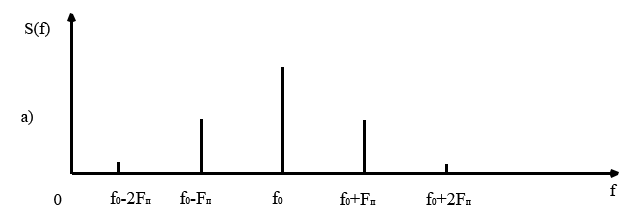 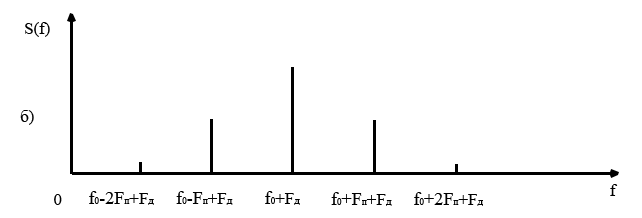 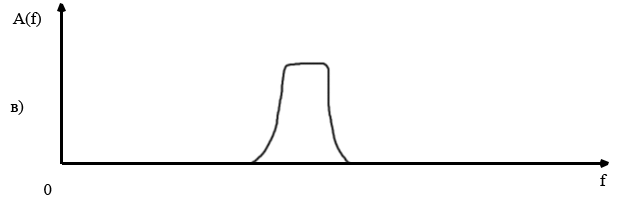 Мал. 1.1. Сутність імпульсно-доплерівського методу придушення пасивних перешкод значно ускладнює алгоритм обробки сигналів і, відповідно, аппаратурное побудова схеми обробки; для точного визначення швидкості цілі необхідно багатоканальне побудова приймального пристрою; якщо перед РЛС ставиться завдання вимірювання дальності до цілі, то доводиться застосовувати спеціальні методи і алгоритми, спрямовані на усунення виникає неоднозначності. З. Когерентно-імпульсна РЛС [24,26]. У даній РЛС для виділення рухомій цілі на тлі пасивних перешкод використовується допплерівський зсув, властивий сигналам, відбитим від рухомих цілей. Цей зсув проявляється у вигляді зміни фази послідовно прийнятих імпульсних сигналів. Щоб скористатися цією можливістю, пред'являються досить жорсткі вимоги до фазової структурі високочастотних коливань, тобто до їх когерентності. 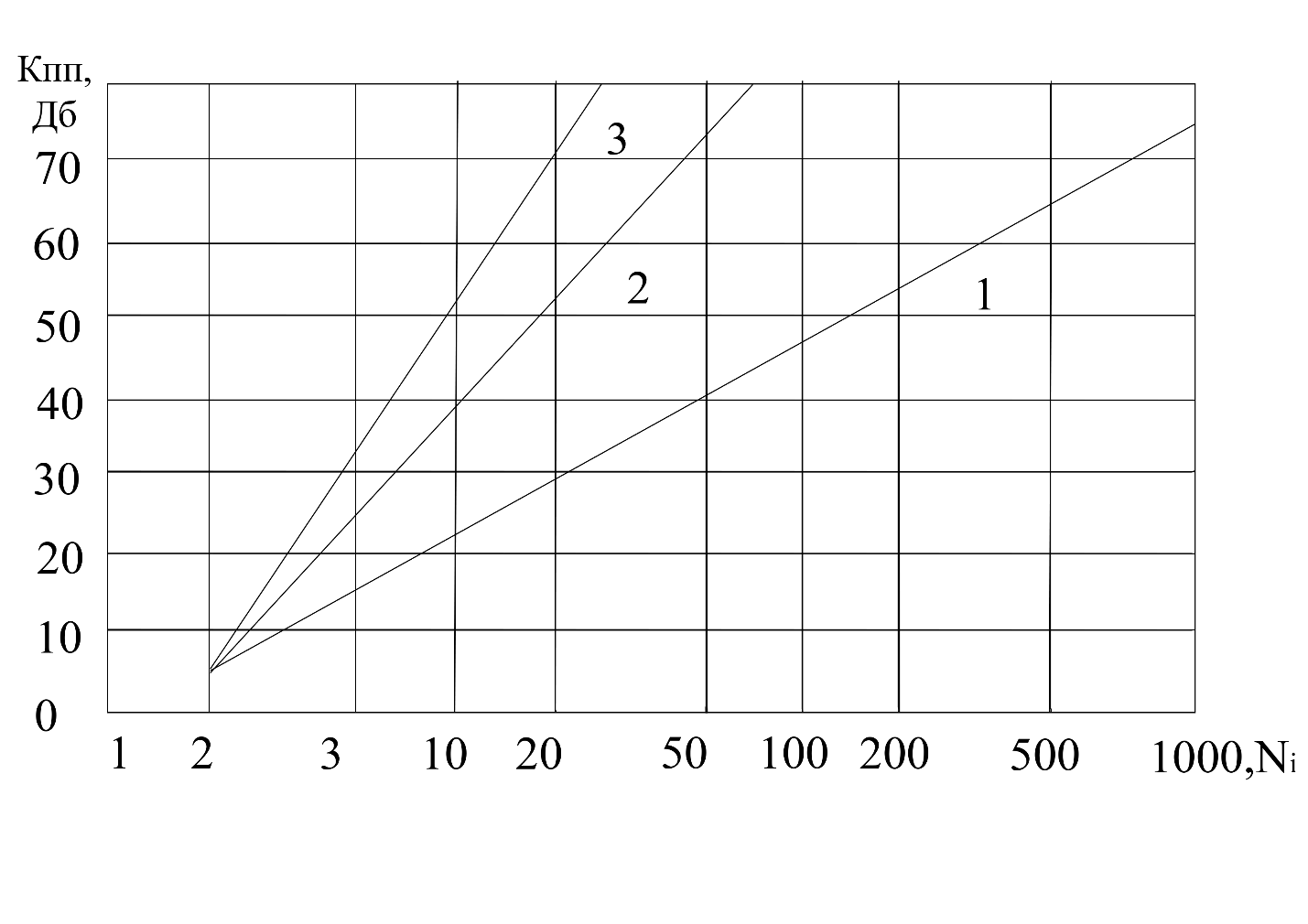 рис 1.2. Залежність величини коефіцієнта придушення пасивних перешкод від кількості імпульсів в пачці (1,2,3 - для однократної, двократної та трикратної ЧПК відповідно) У разі порушення когерентності коливань виникають пульсації компенсуються сигналів, а отже, залишки перешкоди на виході схеми компенсації. Радіолокатори з внутрішньої когерентністю мають істотний недолік. Ці РЛС містять в своєму складі схему компенсації швидкості вітру для придушення сигналів, відбитих від хмари диполів. Але при роботі цієї схеми не компенсуються відображення від місцевих предметів (в тому випадку, якщо відсутня стробування пасивної перешкоди). Застосовуючи системи із зовнішнім когерентністю, доводиться використовувати спеціальні заходи, що не дозволяють компенсувати корисний сигнал. При цьому його тривалість збільшується в два рази і не компенсуються фронти протяжних перешкод. Один з основних недоліків, властивих когерентно-імпульсним РЛС полягає в тому, що ефективність придушення пасивних перешкод безпосередньо залежить від кількості імпульсів в пачці відбитих сигналів і кількості послідовних схем придушення • пасивних перешкод. Теоретичні залежності коефіцієнта придушення 1111 від вищенаведених параметрів показані на рис. 1.2 [26]. На практиці, максимальна величина Кпп для когерентно-імпульсних РЛС становить не більше 40 дб. 4. Багаточастотна РЛС [17]. В даних РЛС фаза відбитого сигналу однієї частоти порівнюється з фазою відбитого сигналу іншої частоти, в результаті чого частота биття (або, інакше, амплітудної модуляції імпульсів) на виході пристрою, що порівнює виявляється залежною від різниці допплерівських зрушень частот випроменених сигналів. Так, при двочастотному зондуванні простору:  (1.3) (1.3) де - різницева допплерівська частота в двочастотної РЛС; і і  - допплерівські здвиги частот А і; - допплерівські здвиги частот А і; і і  - несучі частоти випромінюваних сигналів. - несучі частоти випромінюваних сигналів.Так як,  , то придушення сигналів, відбитих від пасивних перешкод, значно спрощується. , то придушення сигналів, відбитих від пасивних перешкод, значно спрощується.Багаточастотні сигнали є також ефективним засобом боротьби зі «сліпими '' швидкостями цілей в імпульсних системах селекції рухомих цілей [16]. При одночасному многочастотном зондуванні простору обробка прийнятих сигналів ведеться на разностной частоті, і центри зон" сліпих "швидкостей будуть визначатися при незмінному періоді повторення імпульсів що не несуть частотами випромінюваних сигналів, а величиною їх рознесення:  (1.4) (1.4)де  - центральні швидкості "сліпих" зон в двочастотної РЛС. - центральні швидкості "сліпих" зон в двочастотної РЛС.k = 1,2……………m. Так як то в двочастотної РЛС на робочий діапазон швидкостей цілей доводиться значно менше число "сліпих" зон, ніж у відповідній одночастотної РЛС. Тобто, підбором розносу частот число "сліпих" зон в робочому діапазоні швидкостей можна зменшити до однієї.Недоліком багаточастотної РЛС є той факт, що 'ефективність придушення пасивної перешкоди залежить від тривалості пачки відбитих сигналів. Таким чином, можна зробити • висновок про те, що один з основних недоліків, властивих усіх розглянутих РЛС - це. залежність ефективності боротьби з пасивними перешкодами від часу опромінення. Причому, ця залежність носить прямо пропорційний характер, тобто чим більше час контакту з кожною точкою повітряного простору (тривалість пачки прийнятих сигналів), тим краще компенсація пасивної перешкоди. |