Философия даосизма. лк1. Основные понятия и определения тау
 Скачать 289.12 Kb. Скачать 289.12 Kb.
|

|
Тема: основные понятия и определения ТАУ. Автоматическое управление – автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение финиширования управляемого объекта в соответствии с целью управления. Автоматическое регулирование – поддержание на постоянном уровне некоторой заданной величины, характеризующей процесс, или изменение ее по заданному закону, осуществляемое при помощи измерения состояний объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. Автоматизированное управление предполагает наличие в контуре управления человека. Объект управления – техническое устройство, предназначенное для получения заданного вида функционирования. 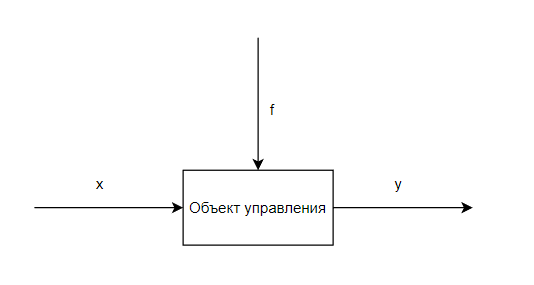  – задание на регулирование – задание на регулирование – регулируемая величина – регулируемая величина – возмущающее воздействие – возмущающее воздействиеВсе объекты управления, вне зависимости от физической природы делятся на: устойчивые, неустойчивые и нейтральные. Объект называется устойчивым, если после кратковременного возмущающего или управляющего воздействия выходная величина возвращается в исходное состояние Объект называется неустойчивым, если после кратковременного возмущающего или управляющего воздействия выходная координата изменится неограниченно. Объект называется нейтральным, если после кратковременного возмущающего или управляющего воздействия выходная координата принимает новое установившееся значение.  Любая система автоматического управления помимо объекта управления содержит техническое устройство для обеспечения заданного закона функционирования объекта – регулятор. 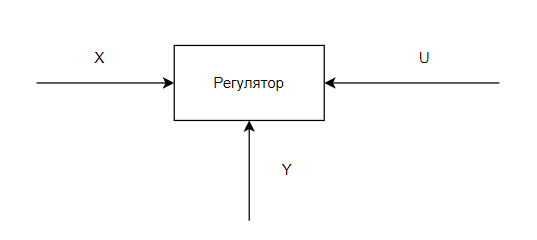 Y – входная величина регулятора, являющая выходной объекта управления U – выходная величина регулятора и одновременно выходная величина объекта управления X – задание на управление Если объединить объект уравнения (ОУ) и регулятор, то получим функциональную схему САР (системы автоматического регулирования): 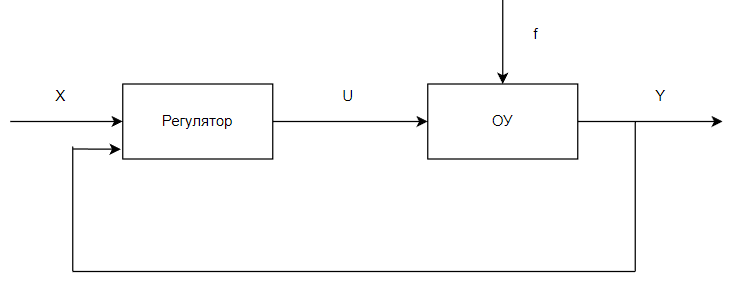 Функциональная схема – схема, где каждому элементу, выполняющему обеденную функцию, соответствует определенное звено. Регулятор является сложным устройством, состоящим из ряда элементов. Выделим основные элементы и представим обобщённую схему САР. 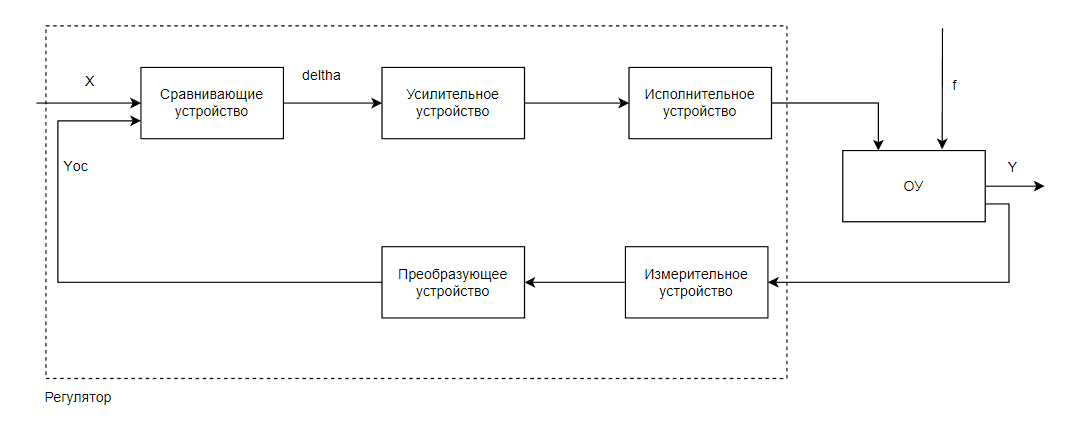 Сравнивающее устройство – осуществляется функцию сравнения двух величин:  – задания на управление, – задания на управление,  – сигнала обратной связи, – сигнала обратной связи,  – ошибка управления(регулирования). – ошибка управления(регулирования).Усилительное устройство – используется для усиления сигнала (УУ). Исполнительное устройство – преобразует выходную величину утилитного устройства в управляющее воздействие (ИУ). Измерительное устройство – служит для измерения регулируемой величины У. Преобразующее устройство – предназначено для получения сигнала, удобного для сравнения с уставкой (заданием на регулирования) х. (Как правило – это электрический сигнал постоянного тока). Классификация САР: По виду задающего воздействия САР делятся на: Системы автоматической стабилизации, где задание на управление Х и регулируемая величина У являются постоянными величинами; Программные системы, где X изменяется по заранее известному закону, а Y повторяет закон изменения Х. Следящие системы, где Х изменяется по заранее неизвестному закону, Y пытается отследить данное изменение. По характеру динамических процессов, протекающих в системе: Непрерывные САУ, в которых любой из сигналов системы управления является непрерывной функцией времени. Дискретные САУ, в которых хотя бы один из сигналов имеет разрывный во времени характер. В свою очередь дискретные САУ делятся на: Релейные, в которых моменты разрыва сигнала обусловлены статическими характеристиками. Импульсные, в которых моменты разрыва задаются специальными импульсными… По виду уравнений, описывающих динамику управления: Линейные Нелинейные Продолжение лекции 1 Основные виды регулирования В зависимости от конфигурации элементов входящих в состав системы выделяют 3 вида регулирования Разомкнутое регулирование  УУ – усилительное устройство; ИУ – исполнительное устройство; ОР – объект регулирования; – задающее воздействие (установка); – регулируемая величина. – регулируемая величина.В данном случае входной сигнал, пройдя усилительное устройство, поступает на исполнительное устройство, которое воздействует на объект регулирования для задания требуемого значения величины Достоинства – простота реализации. Недостатки – невысокая точность регулирования. 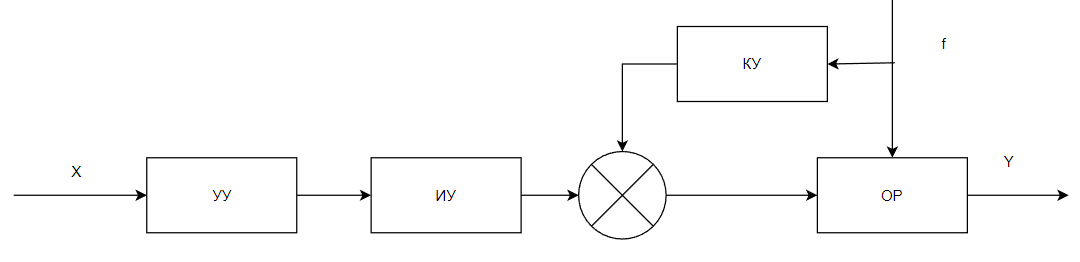 В данном случае возмущающее воздействие измеряется и поступает на корректирующее устройство, где вырабатывается сигнал, пропорциональны моменту нагрузки. Полученный сигнал суммируется с выходными сигналом. Достоинства – более высокая точность по отношению к разомкнутому регулированию. Недостатки – не все возмущения воздействия могут быть измерены. Регулирование по отклонению (обратная связь) 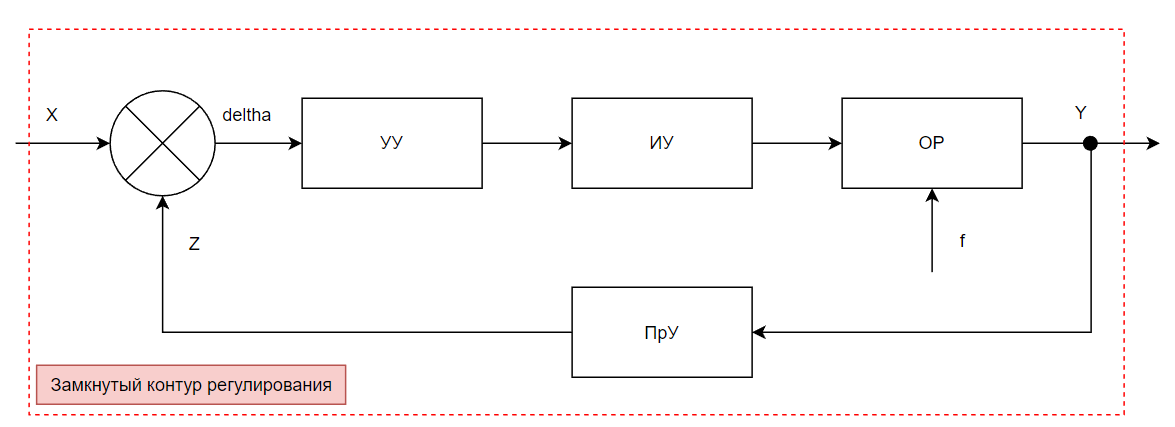 ПрУ – преобразовательное устройство – преобразует регулируемую величину любой природы в величину, удобную для сравнения (например, U). Пусть в установившемся режиме некоторому значению  соответствует значение соответствует значение  . .Рассмотрим более подробно данный принцип регулирования: Предположим, произошло изменение момента нагрузки, воздействующее на объект регулирования. Допустим, что момент нагрузки увеличился. Это значит, что регулируемая величина уменьшится (  ). Следовательно, уменьшится сигнал обратной связи ). Следовательно, уменьшится сигнал обратной связи  на выходе преобразовательного устройства. В результате на выходе преобразовательного устройства. В результате  возрастет, следовательно, возрастет сигнал на выходе УУ и ИУ, который будет воздействовать на объект регулирования, т. о., чтобы вернуть регулируемую величину к значению . возрастет, следовательно, возрастет сигнал на выходе УУ и ИУ, который будет воздействовать на объект регулирования, т. о., чтобы вернуть регулируемую величину к значению .Достоинства – высокая точность регулирования, позволяющая учитывать любое отклонение регулируемой величины вне зависимости от возмущающего воздействия; не зависит от природы возмущающего воздействия. Недостатки – сложность технической реализации. Лекция 2 - Статика САР. Методы расчета САР в установившемся режиме. Уравнение движения САР 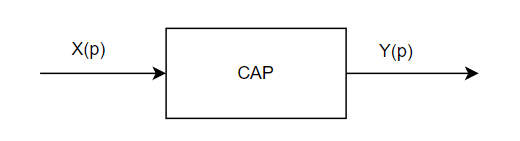 В общем случае любая САР описывается нелинейными неоднородным диф.уравнением  -ого порядка, которое в большинстве случаев удается линеризовать. Тогда линейная, непрерывная САР будет описывается линейным неоднородным диф.уравнением n-ого порядка: -ого порядка, которое в большинстве случаев удается линеризовать. Тогда линейная, непрерывная САР будет описывается линейным неоднородным диф.уравнением n-ого порядка:После окончания динамического или переходного режим в САР устанавливается режим статики, при котором сигналы не являются функциями времени. В установившемся режим данное уравнение будет иметь следующий вид:   – это уравнение статики САР. – это уравнение статики САР.Где К – это статический коэффициент передачи звена или системы. В зависимости от величины ошибки регулирования, в установившемся режиме, системы регулирования подразделяются на статические и астатические. САР называется статической, если в установившемся режиме ошибка регулирования НЕ равна 0 и изменяется по закону изменения входного воздействия. САР называется астатической, если в установившемся режиме ошибка регулирования тождественно равна 0 и не зависит от величины входного воздействия (установки). Рассмотрим, работу САР стабилизации частоты вращения двигателя в режиме статики: 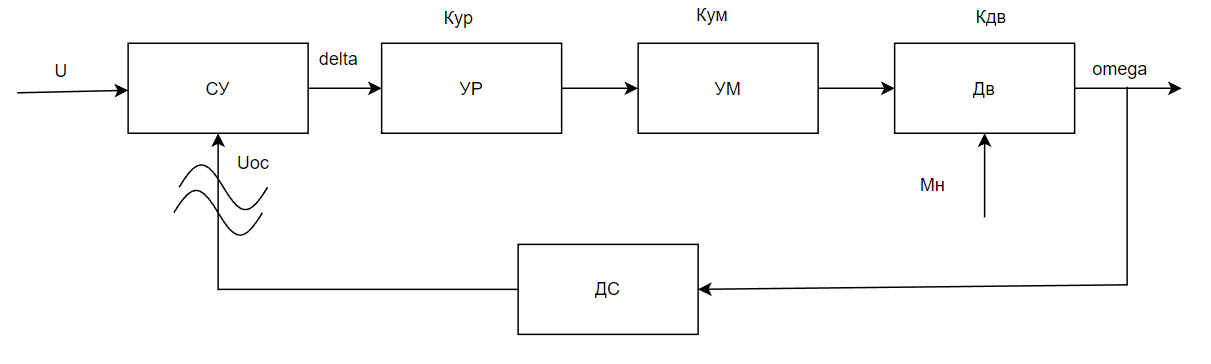 Данная системы является статической, т. к. при  сигнал на выходе двигателя будет равен нулю, и он не будет вращаться. Следовательно, система будет неработоспособна. сигнал на выходе двигателя будет равен нулю, и он не будет вращаться. Следовательно, система будет неработоспособна.Допустим, некоторому значению  , в режиме статики соответствует частота вращения вала двигателя , в режиме статики соответствует частота вращения вала двигателя  . Пусть произошло увеличение момента нагрузки . Пусть произошло увеличение момента нагрузки  . Следовательно, произойдет уменьшение выходной частоты . Следовательно, произойдет уменьшение выходной частоты  . .Вследствие чего выходная величина будет стремиться к базовому значению. Однако в реальных системах, при возрастании нагрузки, скорость вращения вала двигателя будет уменьшаться (прямая 1). При увеличении коэффициента передачи разомкнутой системы  изменение скорости будет меньше (прямая 2), и чем больше будет изменение скорости будет меньше (прямая 2), и чем больше будет  , тем ближе к идеальной будет проходить реальная характеристика. , тем ближе к идеальной будет проходить реальная характеристика.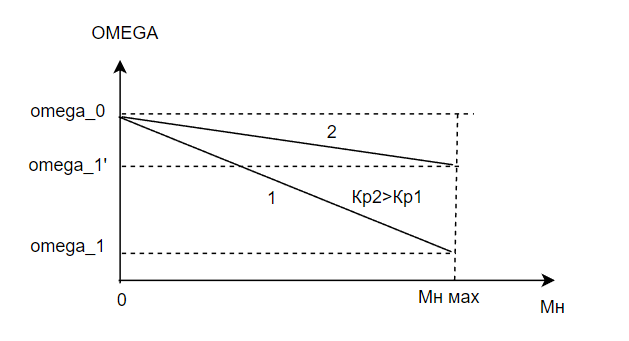 В данном свойстве кроется основное противоречие систем регулирования, т.е. противоречие между точностью и устойчивостью систем регулирования. Т.к в системах существует некоторое Кр предельное, при повышении которого система становится неустойчивой, т.е. неработоспособной. Чем выше точность регулирования САР, тем меньше устойчивой она становится. Качество регулирования определяется внешней характеристикой САР, т.е. зависимостью регулируемой величины от возмущающего воздействия. Для количественной оценки качества регулирования статических систем вводится понятие статизма. Статические характеристики по возмущению объекта регулирования и системы  будет иметь вид: будет иметь вид: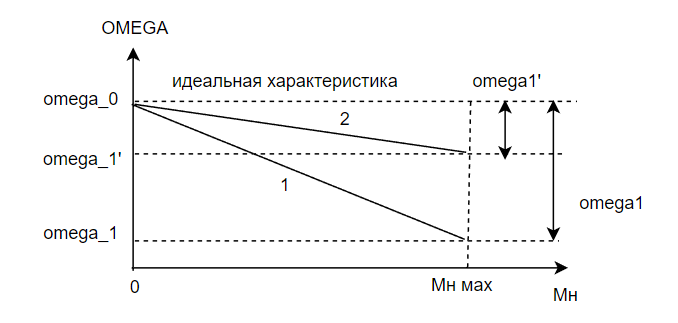 Статизмом называется взятое со знаком “-“ отношение относительного изменения регулируемой величины к вызвавшему его относительному изменению возмущающей величины:  Обычно статизм определяют при изменении возмущающего воздействия от  (режим (режим  ) до ) до  при этом скорость вращения вала изменится от до при этом скорость вращения вала изменится от до  . . Величина статизма может определяться для объекта, не включенного в состав системы. В этом случае вводят понятие статизм объекта. В случае, когда регулирование происходит по замкнутому контуру, будем иметь дело со статизмом системы. Можно показать, что выполняется равенство:  Таким образом статизм системы в  ) раз меньше, чем статизм объекта. Для системы внешняя характеристика будет иметь вид 2. ) раз меньше, чем статизм объекта. Для системы внешняя характеристика будет иметь вид 2.В составе астатической САР обязательно должно присутствовать интегрирующее звено, уравнение которого:  Наличие интегрирующего звена позволяет сделать ошибку регулирования Структурная схема астатической САР имеет вид: 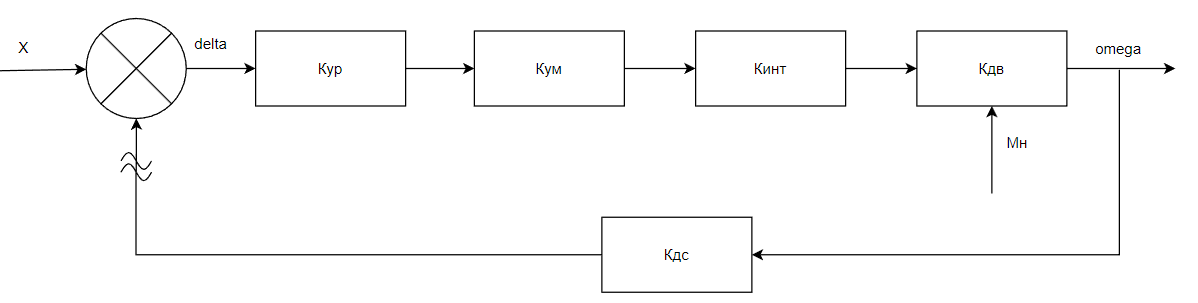 Лекция 3 Структурные преобразования схем Лекция 3 Структурные преобразования схемТипы соединений звеньев: Последовательное соединение звеньев 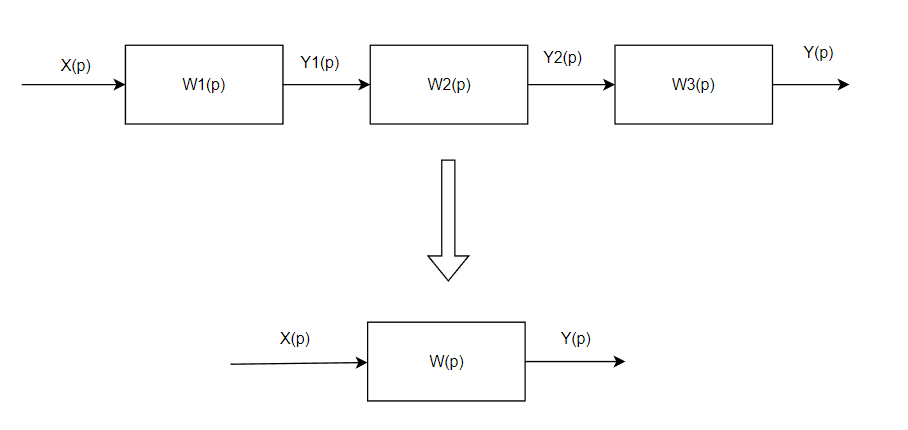   Параллельное согласное соединение звеньев 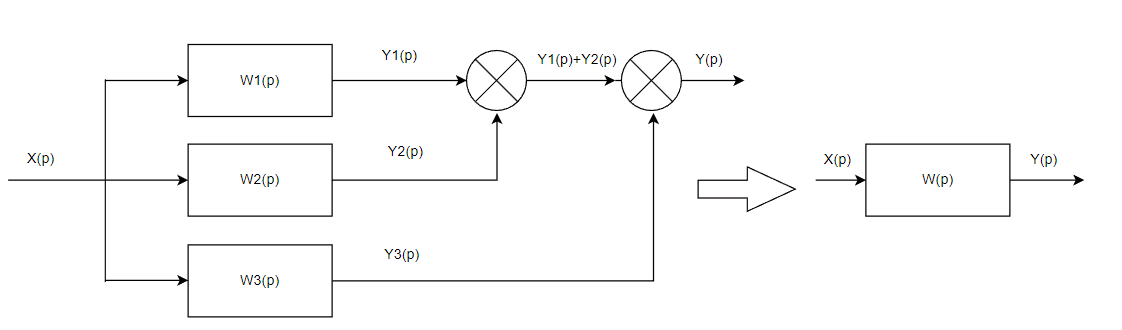 Отличительная особенность параллельного согласного соединения общий входной сигнал для всех звеньев. Параллельное встречное соединение, или соединение типа «обратная связь» 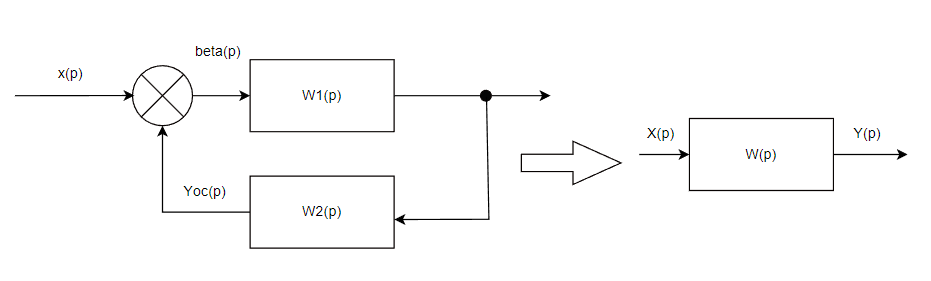 Передаточная функция замкнутой системы равна дроби, числитель которой есть произведение передаточной функций всех звеньев, стоящих в прямом тракте направления - для ПОС, + для ООС Правило преобразования структурных схем: Направлением ветвления схемы называют переход от общего канала к частному. Пример: перенести звено  по направлению ветвления схемы: по направлению ветвления схемы: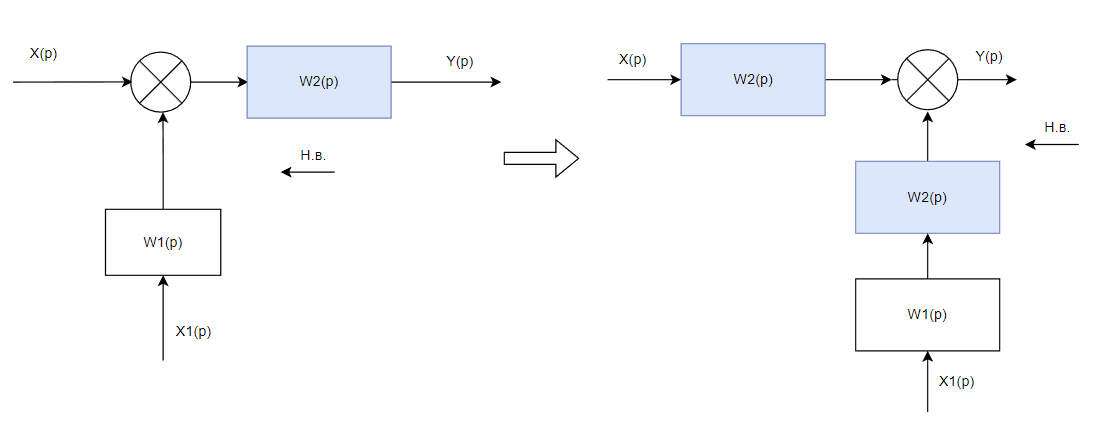 Правило переноса звена по направлению ветвления схемы: При переносе звена ПО направлению ветвления схемы (через узел или сумматор) из общего канала в каждый из частных каналов ставится звено с передаточной функцией, равной передаточной функции переносимого звена. Правило переноса звена против направления ветвления схемы: При переносе звена против направления ветвления схемы из частного в общий канал ставится звено с передаточной функцией переносимого звена. А во все частные каналы ставится звено с передаточной функцией, обратной передаточной функции переносимого звена. Пример: перенести звено  против направления ветвления схемы. против направления ветвления схемы.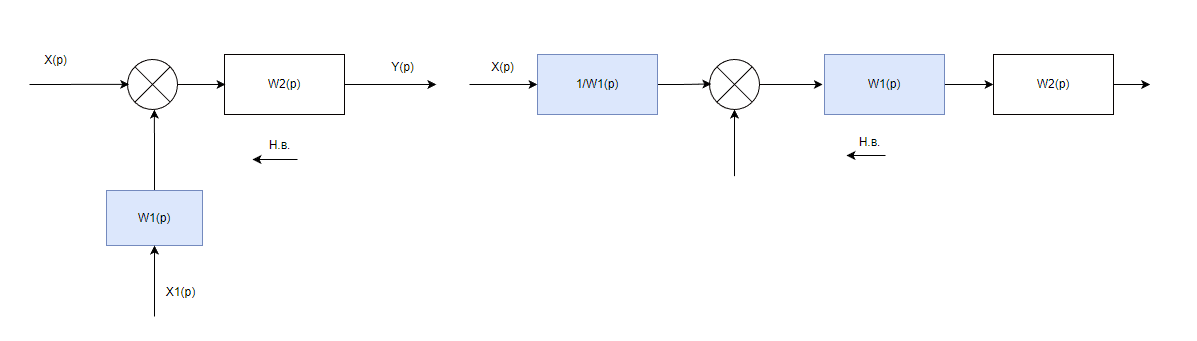 Правило перестановки узлов и сумматоров: Два рядом стоящих узла ИЛИ два рядом стоящих сумматора можно поменять местами. Пример 1: 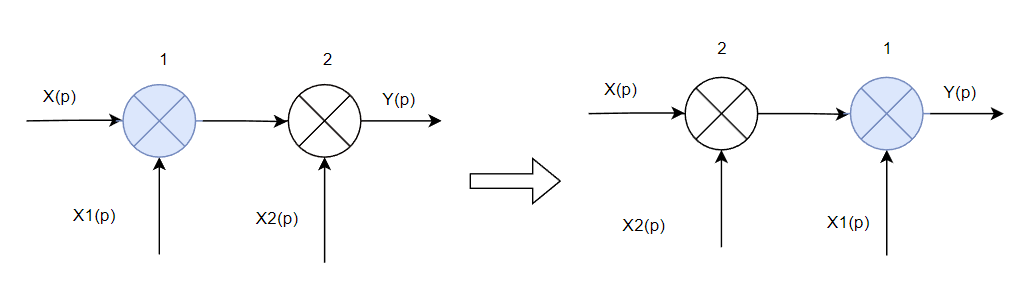 Лекция 4 Лекция 4Передаточная функция САР. Переходная функция САР 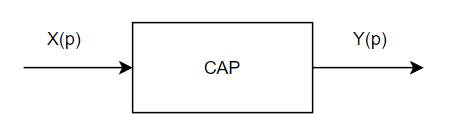 В общем случае любая САР описывается нелинейным неоднородным диф. уравнением n-ого порядка, которое в большинстве случаев удается линеаризовать. Тогда линейная, непрерывная САР в общем виде будет описывается линейным неоднородным диф. уравнением n-ого порядка.  (1) (1)В данном уравнении перейдем к преобразованию Лапласа, полагая, что д момента подачи входного воздействия система находилась в состоянии покоя, т.е.    Передаточная функция звена (системы) - отношение оператора выхода к оператору входа.  Переходная функция звена (системы) – реакция звена (системы) на ступенчатое входное воздействие. Как правило, в качестве ступенчатого воздействия используется единичная функция  . .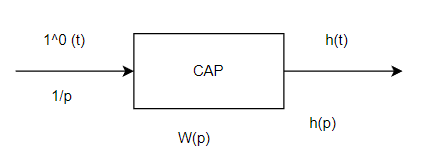 Подадим на вход единичную функцию:  Изображение выходного сигнала будет иметь вид:  С помощью обратного преобразования Лапласа получим:  Пример: найдем передаточную функцию звена: 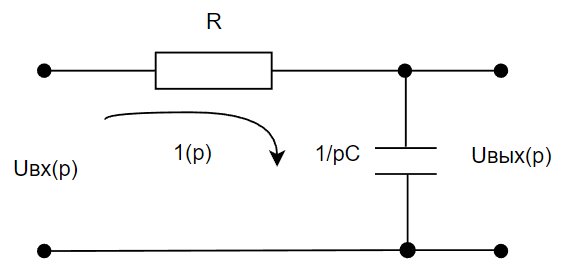 Выразим выходное напряжение:   Тогда передаточная функция звена будет иметь вид:  Пример: по имеющейся передаточной функции звена найдем его переходную функцию. 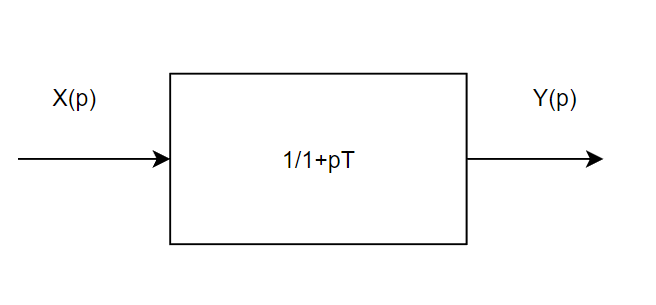 Подадим на вход единичное ступенчатое воздействие вида:   Тогда выходной сигнал будет иметь вид:  Если  то то  – переходная функция звена – переходная функция звенаВоспользуемся обратным преобразованием Лапласа     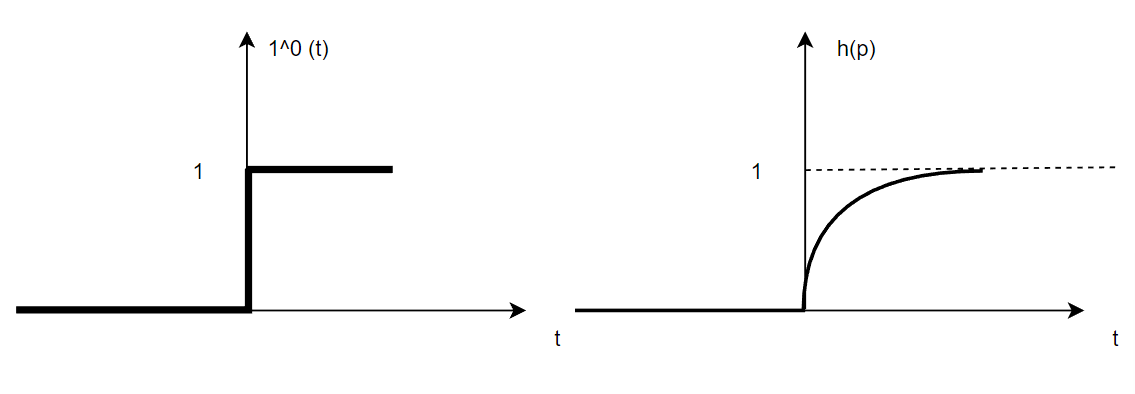 Характеристистическое уравнение САР Любая САР может быть описана неоднородным диф. уравнением вида (1). Решение данного неоднородного уравнения состоит из двух частей:  где где  – представляет собой общее решение однородного диф. уравнения, соответствующего (1) с правой частью, равной 0, – представляет собой общее решение однородного диф. уравнения, соответствующего (1) с правой частью, равной 0, – частное решение уравнения (1). – частное решение уравнения (1).Дописать со слайда 8. Решение однородного дифференциального уравнения находится с использованием решения или корней соответствующего ему характеристического уравнения, которое имеет вид:  Это характеристическое уравнение с точностью до обозначений совпадает со знаменателем передаточной функции замкнутой системы. И, может быть, мнемонические получено из выражения для передаточной функции САР. Комплексный коэффициент передачи. Частотные характеристики САР На практике важно прохождения гармонического сигнала через заданную САР. Как правило, в качестве входного гармонического сигнала используется сигнал вида:  . .В силу линейности системы выходного сигнала  будет иметь вид: будет иметь вид:  . .Для анализа прохождения гармонического сигнала воспользуемся его комплексным представлением:   Подставим  в уравнение (1). в уравнение (1). (Слайд 3) В результате будем иметь:   Отношение комплексного значения выходного сигнала к комплексному значению входного сигнала называют комплексным коэффициентом передачи.  Комплексный коэффициент передачи может быть представлен:  Комплексный коэффициент передачи характеризуется одновременное изменение амплитуды выходного сигнала по отношению к амплитуде входного и сдвиг по фазе выходного сигнала по отношению к входному. Комплексный коэффициент передачи можно изобразить на комплексной плоскости: 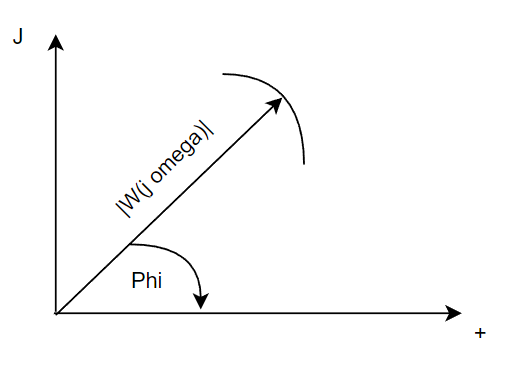 При изменении частоты от 0 до  конец вектора конец вектора  будет описывать некоторую траекторию, которую называют годографом комплексного коэффициента передачи. будет описывать некоторую траекторию, которую называют годографом комплексного коэффициента передачи.Годограф – геометрическое место точек, описанное концом вектора при изменении частоты от от 0 до .Комплексный коэффициент передачи может быть получен мнемонически заменой оператора р в передаточной функции САР на значение  . .Для удобства анализа САР выделяют: Амплитудно-частотную характеристику САР (АЧХ):  Фазо-частотную характеристику САР (ФЧХ):  АЧХ определяет изменение амплитуды выходного сигнала по отношению к амплитуде входного, а ФЧХ определяет сдвиг по фазе выходного сигнала по отношению к входному. Пример: для звена с передаточной функцией вида  найти и поострить все частотные характеристики найти и поострить все частотные характеристики  Комплексный коэффициент передачи будет иметь вид:  Амплитудно-частотная характеристика:  Фазо-частотная характеристика:  |