Особенности синтеза цифровых электроприводов переменного тока на базе асинхронного двигателя
 Скачать 117.72 Kb. Скачать 117.72 Kb.
|

У > характеризую-ОСОБЕННОСТИ СИНТЕЗА ЦИФРОВЫХ ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА НА БАЗЕ АСИНХРОННОГО ДВИГАТЕЛЯ Сформулированы основные положения по организации цифрового управления и общие принципы разработки алгоритмов управления, рассмотрены математические основы анализа дискретных систем, приведен пример синтеза цифрового управления асинхронным двигателем Кчючевые слова: цифровое управление, алгоритм, дискретная систем, анализ, синтез, разностные уравнения, асинхронный двигатель, моментный привод. 1. Основные положения по организации цифрового управления асинхронным двигателем. С точки зрения синтеза систем управления переход к цифровой технике характеризует собой переход к дискретным системам управления с квантованием по уровню и по времени. В отличие от непрерывных сигналов сигналы, поступающие в цифровое управляющее устройство и выходящие из него, принимают дискретные значения в дискретные моменты времени [1]. Квантование по времени представляет собой периодический процесс, характеризующийся тактом дискретности или периодом дискретизации Г. Без учета этих особенностей цифровой системы управления непосредственная реализация в ней аналоговых алгоритмов приводит к понижению статической точности системы, появлению колебательной компоненты с амплитудой, пропорциональной периоду дискретизации, возникновению биения. Методы проектирования цифровых систем управления существенно отличаются от классических методов, применяемых при анализе и синтезе систем непрерывного типа. Это обусловлено следующими особенностями: 1) основой математического аппарата проектирования цифровых систем управления являются разностные уравнения, которые заменяют дифференциальные уравнения, описывающие непрерывные системы; 2) анализ и синтез системы осуществляется на периоде дискретизации Т, что позволяет осуществлять как декомпозицию управления по темпам протекания процессов, так и упрощение уравнений за счет квазипостоянства переменных на этом периоде; 3) в системе имеется память, в которой хранятся значения векторов состояния и управления в предыдущие моменты времени, которые могут быть использованы при решении задачи управления; 4) синтезированные цифровые алгоритмы реализуются чаще всего на микроконтроллерах, которые имеют свои ограничения по длительности цикла вычисления и вычислительным возможностям. Базовой величиной при организации вычисления в микропроцессорном контроллере является длительность цикла вычисления (такта), тесно связанная с моментами времени измерений и вычислительными возможностями микропроцессора. В дальнейших рассуждениях будем предполагать, что используется синхронный принцип управления, и микропроцессор в течение одного такта, с базовой длительностью цикла, равной длительности периода ШИМ, А совпадающего с периодом дискретизации Т, обеспечивает решение поставленной задачи управления, т.е. хватает вычислительных возможностей, чтобы в течение одного такта сформировать команду управления на исполнительное устройство. Следует отметить, что при этом решение задачи управления принципиально не может быть выполнено быстрее, чем за два периода вычислений управления. На первом шаге вычислений (k, k +1) цифровой регулятор по имеющейся информации о переменных и заданиях вычисляет такие команды управления на исполнительное устройство, при которых к концу следующего (k +1, k + 2) шага гарантируется решение задачи управления. На втором шаге на исполнительное устройство подаются эти команды управления. Указанное запаздывание, если оно является существенным для данной системы, должно быть принято во внимание и соответствующим образом компенсировано. Временная диаграмма организации вычислений приведена на рис. 1. 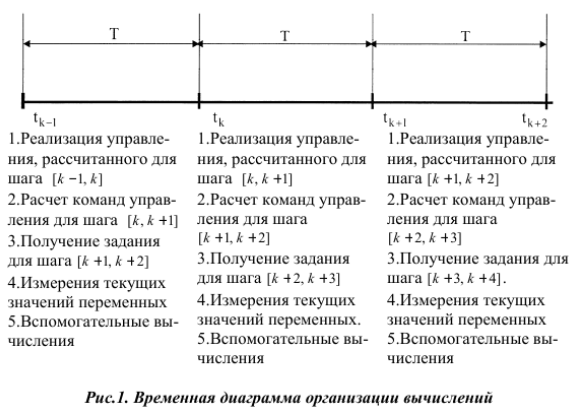 С учетом вышеизложенного для синтеза цифровых систем управления автоматизированными асинхронными ЭП с высокими показателями качества необходима разработка специальных методов проектирования таких систем, учитывающих и активно использующих вышеуказанные особенности цифровых систем управления 2. Математические основы анализа дискретных систем управления При анализе линейных дискретных систем используются разностные ура-внения, дискретное преобразование Лапласа и 7-преобразования Понятие о разностных уравнениях В дискретных системах в качестве переменной функции выступает реше-тчатая функция х(кТ) = х(k). Скорость изменения решетчатой функции характеризуется ее первой разностью (аналог первой производной для непрерывных систем) Ах[ k ] = х[ k +1] - х[ k ]. (1) Вторая разность (аналог второй производной для непрерывных систем) А 2 х[ k ] = х[ k + 2] - 2 х[ k+1] + х[ k ], (2) т.е. вторая разность есть разность первых разностей. Подставляя в (2) выражение для первых разностей получим А2х[к] = х[к + 2] - 2х[к +1] + х(к), (3) аналогично получим разность m -порядка Ашх[к] = Аш-1х[к + 1] - АШ- 1х(к) . (4) Выражая конечные разности через дискреты функции, получим Ш . иГМ-Ш АШх[к] = X (-1)гСгШх[к + ш - г], (5) г=1 ш ш! где С! =-:--коэффициент бинома Ньютона. й(т -1)! Если линейная стационарная непрерывная система описывается дифференциальным уравнением ЛПО + ^ + ...о„х(0=ь0 /1+* + .Л (О (6) йгп йгп-1 йг8 йг8-1 то соответствующая ей дискретная система описывается разностным уравнением (уравнением в конечных разностях) с постоянными коэффициентами а0 Ах[к ] + аф п-1 х[г ] +... + апх[к ] = Ь0 А [к ] + ^А 5-1/[к ] +... + Ь8/[к ] (7) с начальными условиями Ах[0] = х0, Ах[0] = х1 ..., А п-1х[0] = хп-1. Выражая конечные разности через дискретные значения функций в соответствии с формулой (4) уравнение (7) можно записать в форме рекуррентного разностного уравнения С0х[к + г] + С1х[к + г -1] +... + Сг-1х[к +1] + Сгх[к] = = й0 / [к + V ] + й1 / [к + V -1] +... + йу-1 / [к +1] + й1 / [к ] (8) при начальных условиях Ах[0] = х0, Ах[1] = х1 ...,х[к -1] = хк-1, где г £ п, V £ 8, г > V, а коэффициенты С1, V = 0,1,...,г, й0 выражаются через коэффициенты уравнения (7) аг, г = 0,1,...,п, Ьг, г = 0,1,...,8. Дискретное преобразование Лапласа На рис. 2 приведена структурная схема линейной дискретной системы. Из структуры рис. 2 можно записать ¥ е (г) = Хе(кТ )Б (г - кТ). (9) к=0 Так как идеальное импульсное звено (ИИЗ) генерирует последовательность мгновенных единичных импульсов (£-функций), то сигнал на выходе ИИЗ можно представить в виде ¥ е* (г) = Т$(е - кТ)е(кТ). (10) к=0 150 Рис.2. Структурная схема линейной дискретной системы В силу свойств ИИЗ в эквивалентной схеме имеется формирующее звено с весовой функцией w _ S(t), которой соответствует передаточная функция Шф (р) = L{S (t)} = S (P). (11) Для последовательности прямоугольных импульсов скважностью Y = Ти /T (рис. 3) весовая функция определяется выражением S (t) = Ku [1(t) - 1(t - YT). (12) Преобразовав обе части соотношения (12) по Лапласу, получим передаточную функцию ФЗ s ( Р ) _ Kи (1 - e-YTp) (13) Рис.3. Формирование прямоугольных импульсов скважностью у Учитывая (13), для Ки = 1 и у = 1 получим передаточную функцию ФЗ, которая называется экстраполятором нулевого порядка S (p) 1 - e - JTP Р (14) Для дискретных значений выходной величины х (t) можно запи- сать X (t) _ I х(kR)8(t - kT). k _ 0 oo Совокупность гармонических функций, на которые может быть разложен 8(? - кТ), равна е-кТ. Поэтому спектр ¥ X* (уш) = I х(кТ)е-кТ . (16) к=0 Заменив в (16) уш = р, получим формулу, определяющую прямое дискретное преобразование Лапласа для решетчатой функции ¥ г X* (р) = I х(кТ)е-рТ . (17) к=0 i Поскольку частота квантования шт = 2 п / Т, получим е - у (ш+кшт) кТ = е - кТе - к 2 п / Т = е - ую кТ, т.е. вся плоскость р для дискретной переменной разделена на полосы вдоль мнимой оси, одинаковые по размеру шт (рис. 4) Рис.4. Главная полоса плоскости р, соответствующей дискретному преобразованию Лапласа 2 - преобразования Аналогично, как с помощью преобразования Лапласа линейное дифференциальное управление преобразуется в алгебраическое, линейное разностное уравнение можно преобразовать в алгебраическое с помощью 2 - преобразований. Обозначим в формуле (17) 2 = ерТ Подставляя р = уш и рассматривая диапазон частот (- п / Т) £ ш £ п / Т, получаем формулу 2 -преобразования ¥ 1 X(2) = I х(кТ>-к, (18) к=о е-уп £ 2 £ еуп. (20) На плоскости 2 отрезок мнимой оси главной полосы плоскости р (рис. 5) отображается в окружность единичного радиуса на плоскости z. z - преобразование применимо только для дискретной системы по времени функции / [ к ] = / (кТ), где Т - период квантования. Учитывая, что z - комплексная переменная, обратное преобразование осуществляется по формуле / [ к ] = / Г (z )2к-1dz. (20) 2 щ Рис.5.Область устойчивости линейной дискретной системы на плоскости 3. Общие принципы разработки алгоритмов управления При синтезе алгоритмов цифрового управления использованы следующие принципы: - принцип декомпозиции, позволяющий проводить синтез автономно для каждой задачи управления. Возможность декомпозиции определяется существенным разделением темпов управления в отдельных контурах (процессы регулирования тока и момента, процессы оценивания величины и направления магнитного поля, процессы регулирования положения и скорости могут рассматриваться независимо); - векторное управление асинхронным двигателем с ориентацией по вектору магнитного поля (потокосцепления) двигателя; - независимое управление электромагнитным моментом и величиной поля при постоянной величине магнитного поля; - построение регулятора электромагнитного момента (активного тока) во вращающейся системе координат; - использование при синтезе алгоритма управления разностных (точных) уравнений процессов в двигателе, что соответствует (адекватно) принципу цифрового процессорного управления; - использование автономных наблюдателей (апроксиматоров) значений регулируемых переменных и регулирование по прогнозным значениям переменных, исключающее запаздывание вычислений управления, осуществляемых в процессоре последовательно во времени; - использование автономных оптимальных фильтров (фильтров Калмана), обеспечивающих фильтрацию измеряемых значений переменных состояния без динамической ошибки; - использование конечношаговых алгоритмов управления (дискретных скользящих режимов), обеспечивающих максимальное быстродействие регуляторов; - использование оптимальных векторных алгоритмов широтно-импульсного регулирования выходного напряжения автономного инвертора, питающего асинхронный двигатель. 4. Цифровые алгоритмы управления моментным приводом 4.1. Состав и структура регулятора моментного привода (рис. 6): - регулятор тока; - формирователь заданий тока (координатный преобразователь поворота векторов; - формирователь заданий напряжения; - модель потокосцепления ротора; - автономного фильтра; - системы приема сигналов задания момента; 4.2. Функциональные алгоритмы регулятора привода; 4.2.1. Алгоритм регулирования тока. Рис.6. Контур управления током моментного привода Регулятор тока осуществляет формирование заданных значений вектора напряжения на систему ШИМ так, чтобы вектор тока в двигателе был равен заданному. На вход регулятора тока поступают значения заданных токов в фазах и их измеренные значения, а выходом регулятора тока являются заданные фазные напряжения. Уравнения в статорных обмотках имеют вид Ж / ( = Яедг + к1пФ + к2и + /, (21) где ¡,и,Ф - векторы тока, напряжения статора и потокосцепление ротора, п - скорость вращения ротора, ,к/ - коэффициенты, /- неконтролируемые возмущения. Темпы изменения магнитного поля, скорости вращения ротора и возмущений, обусловленных временными задержками в передаче команд управления силовыми ключами, токовыми паузами, ошибками вычислений оценок напряжения, достаточно медленны по сравнению с темпами регулирования тока. С учетом сказанного уравнение ошибки контура тока принимает вид йМ / (М = / + к2 Аи, (22) й/ / Л = 0. (23) Величина А/ измеряется, Аи - известное управление. При переходе к разностным уравнениям получим А/к+1 = /Т + к2Т (Хк +Аик )/2, Хк+1 = Аик, (24) /к+1 = /к . Величина / может быть оценена по результатам измерения ошибки регулирования на двух последовательных шагах регулирования. Если имеются измерения А/к и А/к+1 и в интервале между этими измерениями управление имело значение Аи к, то Аик = -2//к + ик+1 /2 - 1к /к2Т, / = - к 2( Хк + Аик) / 2 + (А/к+1 -А/к)/ Т. (25) Поскольку оценивание и регулирование происходят независимо, значение оценки возмущения (25) может быть отфильтровано при помощи наблюдателя фильтра Калмана в соответствии с выражением /к = /к-1 +1 (/к - /к-1), 0 < I < 1. Все вычисления возмущения и напряжения должны быть выполнены в течение текущего интервала ШИМ. 4.2.2. Алгоритм вычисления поля статора Уравнение магнитного поля ротора в системе координат, ориентированной по направлению вектора поля имеет вид: (у /й = -(Яг /Ьг )(у - ) (26) где у - величина поля; - ток намагничивания. Направление вектора поля - угол поворота системы координат задается уравнением = n + (27) Lr \|/ где iq - активный ток; п - скорость ротора. Разностные уравнения магнитного поля ротора (28) Lr \|/ 4.2.3. Формирователь заданного тока Формирование заданного тока заключается в координатном преобразовании токов i(j4q в неподвижную систему координат, и нахождение проекций вектора тока на фазные орты. Преобразование координат осуществляется в «медленном» времени, в течение основного цикла расчета и задается формулами lock = 4k cos вк |