аа. Отчет 16 нса Таырып Автоматты реттеу жйесіні арапайым сызыты емес сипаттамаларын зерттеу
 Скачать 0.54 Mb. Скачать 0.54 Mb.
|

|
ҒҰМАРБЕК ДӘУКЕЕВ АТЫНДАҒЫ АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ Электр машиналары және электр жетегі кафедрасы ОТЧЕТ «16» нұсқа Тақырып:Автоматты реттеу жүйесінің қарапайым сызықты емес сипаттамаларын зерттеу Пән: Автоматты басқару жүйелері Мамандығы:«5В071800 Электроэнергетика» Орындаған: (Аты-жөні) Тобы:ЭЭк-20-1 Қабылдаған_______Даримбаева Н._________________ (Аты-жөні) ________ ___________ «____» _________ 2021 ж. (баға) (қолы) Алматы 2021 Зертханалық жұмыс №4. Автоматты реттеу жүйесінің қарапайым сызықты емес сипаттамаларын зерттеуЖұмыстың мақсаты: қарапайым сызықты емес буындармен танысу және олардың сипаттамаларын зерттеу 4.1 Қысқаша теориялық кіріспеАвтоматты реттеудің сызықты емес (бейсызық) жүйелері деп ең болмағанда бір буыны сызықты емес теңдеумен сипатталатын жүйені айтады. Мұндай буындар сызықты емес буындар немесе сызықты емес элементтер деп аталады. 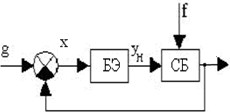 Сызықты емес жүйелерді эквивалентті түрлендіру жолымен бейсызық (сызықты емес) элемент пен сызықты бөлікті тізбектей қосатын тұйықталған контур түрінде қарастырамыз. Сызықты емес жүйенің сқлбасы 4.1 суретте көрсетілген. Сызықты емес жүйелерді эквивалентті түрлендіру жолымен бейсызық (сызықты емес) элемент пен сызықты бөлікті тізбектей қосатын тұйықталған контур түрінде қарастырамыз. Сызықты емес жүйенің сқлбасы 4.1 суретте көрсетілген.БЭ – бейсызық элемент; СБ – сызықты бөлік. сурет – Сызықты емес жүйе сұлбасы Сызықты емес жүйелердің көп бөлігі сызықталуға келеді және типтік динамикалық буындармен сипатталады. Сызықты емес буындардың түрлері: бір белгілі сипаттамаларынан тұратын сызықты емес буын (статикалық бейсызықтылық); көп белгілі сипаттамаларынан тұратын сызықты емес буын (динамикалық бейсызықтылық); ерекше сызықты емес элементтері. Буынның бір белгілі сипаттамасы кіріс координаталарының мәніне ғана сезімталдығы болады, буын кіріс координатасының қозғалыс бағытына не оның туындысына сезімталдығы болмайды. Сызықты емес буындардың түрлері: Тегісқисықсызықтысипаттамалысызықтыемесбуындар. Бұл сипаттамалар 4.2 суретте көрсетілген. 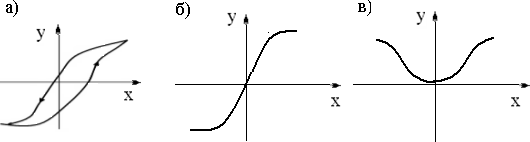 а – гистерезис тәрізді; б, в - күшейткішті. сурет - Тегіс қисықсызықты сипаттамалар , а - суретте екі белгілі гистеризис тәрізді (кешігуші) сипаттама көрсетілген. 4.1, б - суретте қанығу аймағынан тұратын немесе шектеу және нақты қуат күшейткішіне сәйкес келетін сипаттама, ал 4.1, в - нақты қуат күшейткішін көрсететін сипаттама көрсетілген. 4.1, а және б - суреттердегі сипаттама жұпсыз-симметриялы, ал 4.1, в - суретте жұп-симметриялы түрі көрсетілген. Тілімді-сызықтысипаттамалысызықтыемесбуындар. Мұндай сипаттама 4.3 суретте көрсетілген. 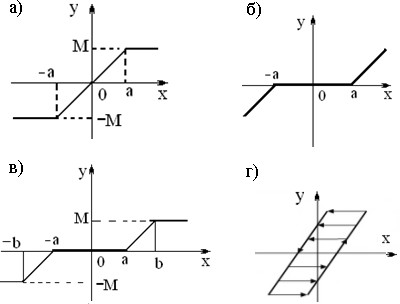 қанығу аймағы; б) сезімталдығы жоқ аймақ; в) қанығу және сезімталдығы жоқ аймағымен; г) люфт тәрізді. сурет – Тілімді сызықты сипаттамалар , а - суреттегі сипаттамадан қанығуды, 4.3, б - суреттен сезімталдығы жоқ аймағын, ал 4.3, в - суреттен бір уақытта қанығуға және сезімталдығы жоқ аймағына ие болатын буындар сипаттамасын көруге болады. 4.3, г - суреттегі сипаттамадан кинематикалық беріліс саңылауынан тұратын сипаттаманы көреміз. Релелі буындар дегеніміз шығысында тіркелген мәннің соңғы санын беретін элементтер. 3.4 суретте типтік релелік сипаттамалар бейнеленген. 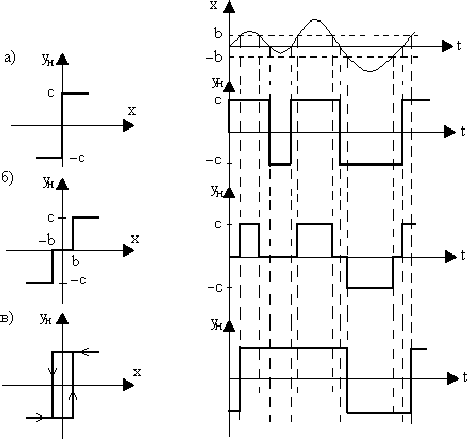 а) идеалды; б) сезімталдығы жоқ аймақ; в) гистерезисті. сурет - Релелі сипаттамалар , а – суретте көрсетілген сипаттамалар идеал екі позициялы релеге, ал 4.4, б – суретте сезімталдығы жоқ аймағымен үш позициялы релеге, ал 4.4, в – суреттегі екі позициялы поляризацияланған релеге сәйкес келеді. Сонымен қатар 4.4 суретте реле типіне сәйкес келетін үздіксіз сигналдың өтуі көрсетілген. Осы жерден байқайтынымыз, реленің беріліс коэффициенттері кіріс әсердің шамасынан тәуелді болады. Жүйенің динамикалық қасиеттерін жақсарту үшін арнайы озатын екі белгілі статикалық сипаттамалы сызықты емес буындар құралған. MATLAB-Simulink бағдарлама кітапханасының Nonlinear бөлігі сызықты емес бөлікке арналған, кең қолданылатын сызықты емес блоктардан тұрады (4.5 сурет).  сурет – Сызықты емес блоктардан құралған Simulink пакетінің терезесі Жұмыстың бағдарламасыMATLAB-Simulink бағдарлама кітапханасының Nonlinear кітапханасынан сызықты емес блокты таңдап модель құрамыз (4.6 сурет). Кіріс сигнал ретінде Sourcesблогындағы SineWaveсинусоиданы қолданамыз. Сигналдарды салыстыруға қолайлы болу үшін бастапқы және сызықты емес блок арқылы өтетін Simulink кітапханасының Signal & Systems бөлімінен Muxблогын қолданамыз. Mux (4.6 суретте ол қара тік бұрыштармен белгіленген) блогының кірісіне сигналдар беріледі, ал шығыс Scopeблогына жалғанады.  4.6 сурет - Зерттеу жүргізуге қажетті сызықты емес жүйенің моделі 4.6 суретте көрсетілген модел сұлбасында сызықты емес блоктарды өзгерту реті: 1) Saturationблогы (шектеу немесе қанығу буыны). DeadZoneсезімталдығы жоқ аймақтық блок. Relayрелелі блок. Осы аталған блоктардың моделін алу керек. 4.1 және 4.2 кестелерде нұсқаларға сәйкес келетін блоктардың параметрлері көрсетілген. Нұсқаға сәйкес параметрлерін енгізу. Кірісіне гармоникалық сигнал бере отыра типтік сызықты емес статикалық сипаттамаларды алып, талдау. 8.2.3 Зерттеу нәтижелері бойынша типтік сызықты емес сипаттамаларға қорытынды жазу. кесте – Қанығу аймағынан тұратын бесызықты блоктардың параметрлері
кесте – Гестирезисті бейсызықты блоктардың параметрлері
Есеп беруге талаптарЕсеп беру келесі бөлімдерден тұруы керек: Сыртқы беті. Жұмыстың мақсаты және орындалу тәртібі. Теориялық бөлімнен қысқаша мазмұн. Сызықты емес буындармен моделдің үш сұлбасы. Тәжірибе нәтижелері. Қорытынды. Бақылау сұрақтарыСызықты емес буындарды түрлері? 4.2.4Типтік сызықты емес буындар. Simulink кітапханасының қандай бөлімі сызықты емес жүйелерді зерттеуге арналған? Статикалық сипаттама деген не? Сызықты емес жүйе анықтамасы. Кіріс шығыс шамалары. Жүйенің эквивалентті беріліс функцияның түрі қандай? Saturationблогы (шектеу немесе қанығу буыны). 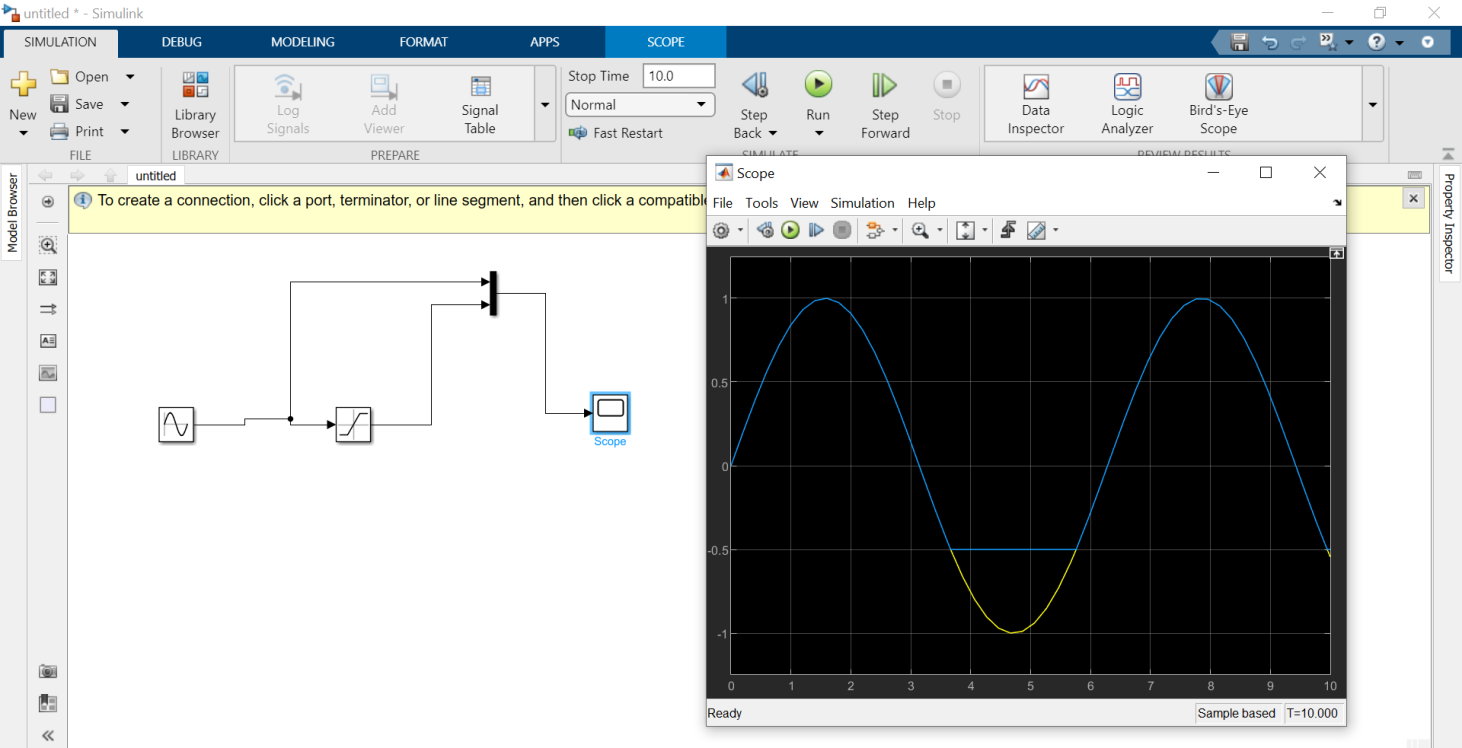 DeadZoneсезімталдығы жоқ аймақтық блок. 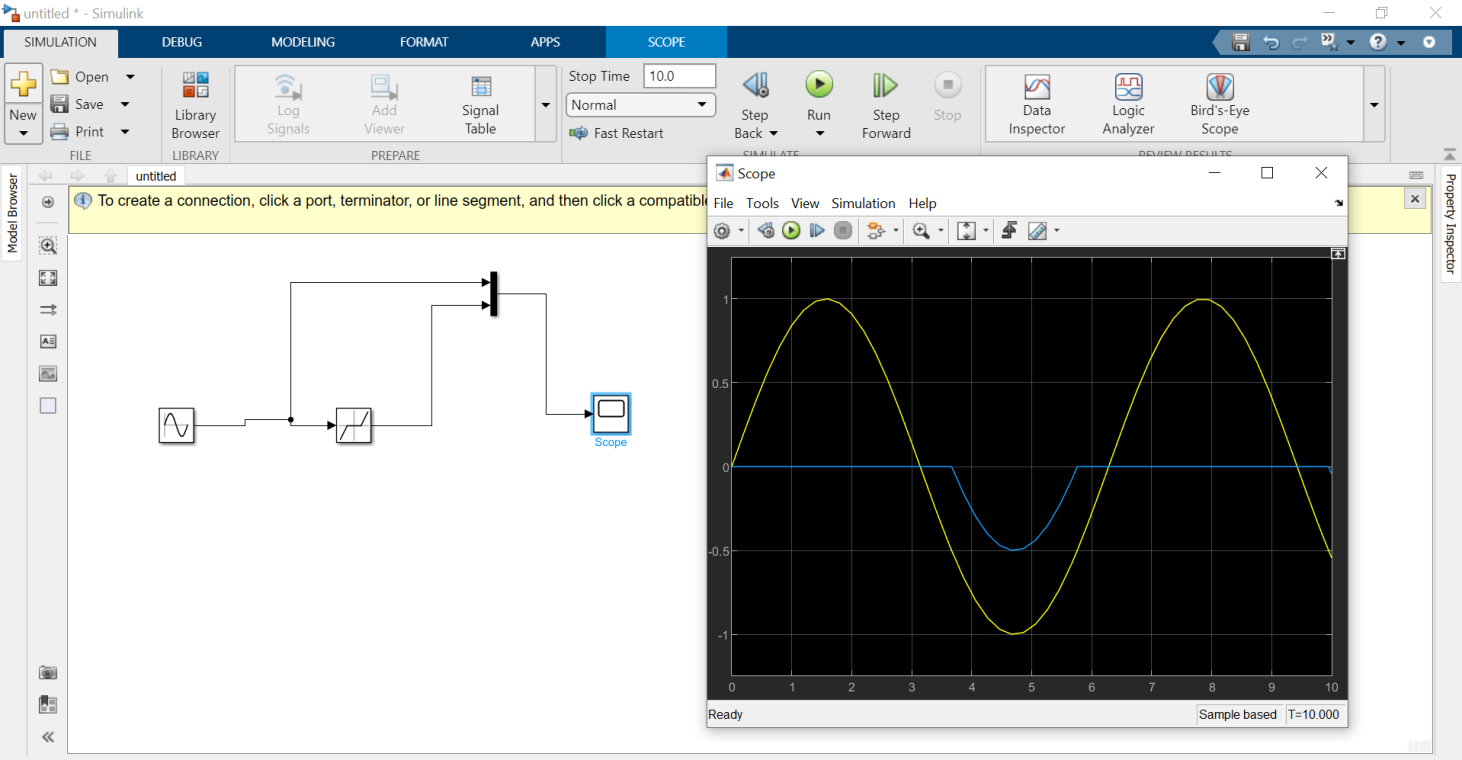 Relayрелелі блок  |