Ознакомление с НГП. Лабораторная работа 1. Отчет по лабораторной работе 1 по дисциплине Промышленные роботы
 Скачать 1.66 Mb. Скачать 1.66 Mb.
|

 Министерство науки и высшего образования Российской Федерации ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «ОРЕНБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» Аэрокосмический институт Кафедра систем автоматизации производства ОТЧЕТ по лабораторной работе 1 по дисциплине «Промышленные роботы» на тему «Ознакомление с учебным роботом» ОГУ 15.03.04. 4023. 217 О Руководитель канд. техн. наук., доцент кафедры систем автоматизации Русяев А.С. а подпись инициалы фамилия «»20г. Студент группы З-20АТП(ба)ОП Персидский А.В. подпись инициалы фамилия «»20г. 1Цель работы 3 2Задание 1 (общее). 3 3Задание 2 (по вариантам). 3 4Ход выполнения лабораторной работы 3 4.1Пример текста управляющей программы с расшифровкой из примера 3 4.2Выполнение задания 1 5 4.3Выполнение задания 2 8 5Контрольные вопросы 10 5.1Какие существуют системы координат роботов? 10 5.2В какой системе координат работает учебный робот? 10 5.3Какой файл загружался для управления работой ГПС? 10 5.4Какая панель инструментов применяется для запуска автоматического режима работы ГПС? 10 5.5Как проверить загружена ли управляющая программа? 10 5.6Какая команда в управляющей программе робота предназначена для поворота основания? 10 5.7Какой командой в управляющей программе робота кодируется включение зажима детали на фрезерном станке? 10 Заключение 11 Цель работыОзнакомиться с назначением и программированием учебного робота. Изучить работу робота по заранее созданной управляющей программе. Составить управляющую программу для робота по заданию. Задание 1 (общее).Осуществить расстановку оборудования (токарного, фрезерного станков и заготовки) для правильного отображения работы комплекса в имитаторе при выполнении управляющих программ «GPS2.prg», «GPS_TOK.prg», и «GPS_FRE.prg». В случае «зависания» заготовки в воздухе над станком внести изменения в управляющую программу. Записать в отчет положения оборудования (X,Y,угол), заготовки и текст измененной управляющей программы робота. Задание 2 (по вариантам).Согласно номеру в списке группы выполнить следующее задание: переместить «объект 1» из начальной точки (1-ой) пространства во 2-ю и после этого в 3-ю, изменив программу робота. После каждого перемещения робот должен уходит на нулевую точку для позиционирования. Записать в отчет текст полученной управляющей программы с комментариями. Таблица 1 – Варианты заданий
Ход выполнения лабораторной работыПример текста управляющей программы с расшифровкой из примераТаблица 1 – Пример текста управляющей программы с расшифровкой
Продолжение таблицы 1
Выполнение задания 1Управляющая программа GPS2.prg
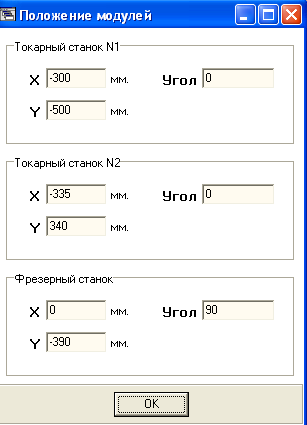 Рисунок 1 – координаты расположения станков 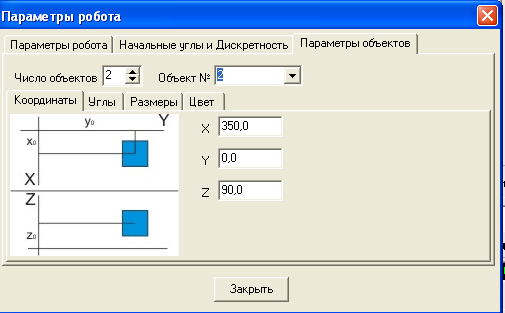 Рисунок 2 – координаты заготовки 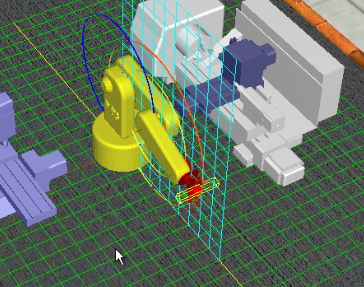 Рисунок 3 – Заготовка в схвате 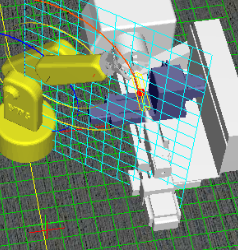 Рисунок 4 – Заготовка на станке 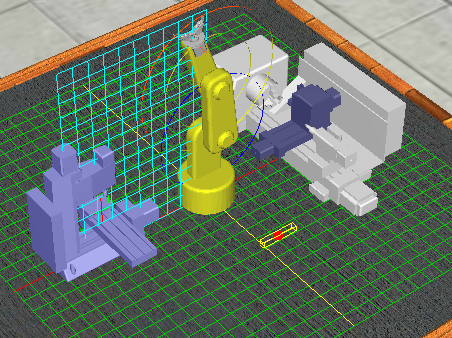 Рисунок 5 – Расположение станков Выполнение задания 2
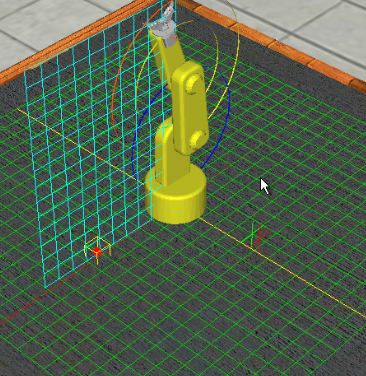 Рисунок 6 – Начальное положение заготовки (точка 1) 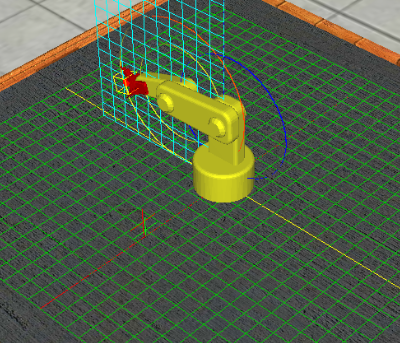 Рисунок 7 – Схват и перемещение в точку 2  Рисунок 8 – Схват и перемещение в точку 3 Контрольные вопросыКакие существуют системы координат роботов?Ангулярная система координат В какой системе координат работает учебный робот?Ангулярная система координат Какой файл загружался для управления работой ГПС?Необходимо открыть текстовые файлы, имеющие расширение «*. prg». Какая панель инструментов применяется для запуска автоматического режима работы ГПС?Как проверить загружена ли управляющая программа?F10 Какая команда в управляющей программе робота предназначена для поворота основания?GotoW m* Какой командой в управляющей программе робота кодируется включение зажима детали на фрезерном станке?SFLockerON ЗаключениеОзнакомились с назначением и программированием учебного робота. Изучили работу робота по заранее созданной управляющей программе. Составили управляющую программу для робота по заданию. Оренбург 2023 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||