Лабораторная работа. Отчет по лабораторной работе 4 по дисциплине Промышленные информационноизмерительные системы
 Скачать 1.39 Mb. Скачать 1.39 Mb.
|

Институт информационных технологий (ИИТ) Кафедра промышленной информатики (ПИ) ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ №4 по дисциплине «Промышленные информационно-измерительные системы»
Москва 2021 г. Цель работы: получение навыков проектирования систем управления с режимами свободной и связной наладки. Постановка задачи: Вариант 10. Студенту выдается согласно варианту закон управления, описывающий работу системы. На основе закона управления студент выводит циклограмму работы системы, строит таблицу включения и из таблицы включения выводит все управляющие функции системы управления, далее проводит минимизацию полученных функций по выбранному методу минимизации. В конце минимизированные функции используются для построения уравнений системы управления с режимом свободной наладки и принципиальной схемы полученной системы управления. Студенту выдается согласно варианту закон управления, описывающий работу системы. На основе закона управления студент выводит циклограмму работы системы, строит таблицу включения и из таблицы включения выводит все управляющие функции системы управления, далее проводит минимизацию полученных функций по выбранному методу минимизации. В конце минимизированные функции используются для построения уравнений системы управления с режимом связанной наладки и принципиальной схемы полученной системы управления. Результат работы: Закон управления согласно варианту:  Из закона видно, что в системе будут использоваться 3 исполнительных устройства, а также 6 тактов. На основе данных построим циклограмму работы системы (рис. 1) 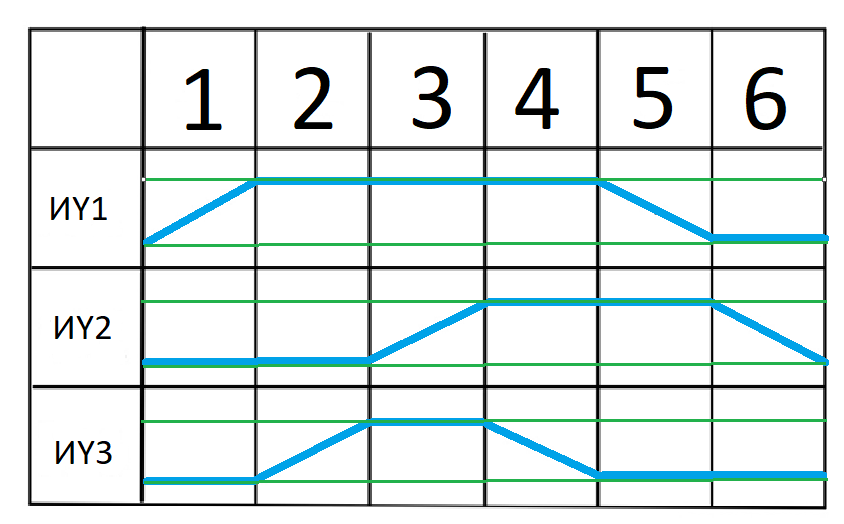 Рис.1 Циклограмма Далее, на основе полученной циклограммы, построим таблицу включений (рис. 2). 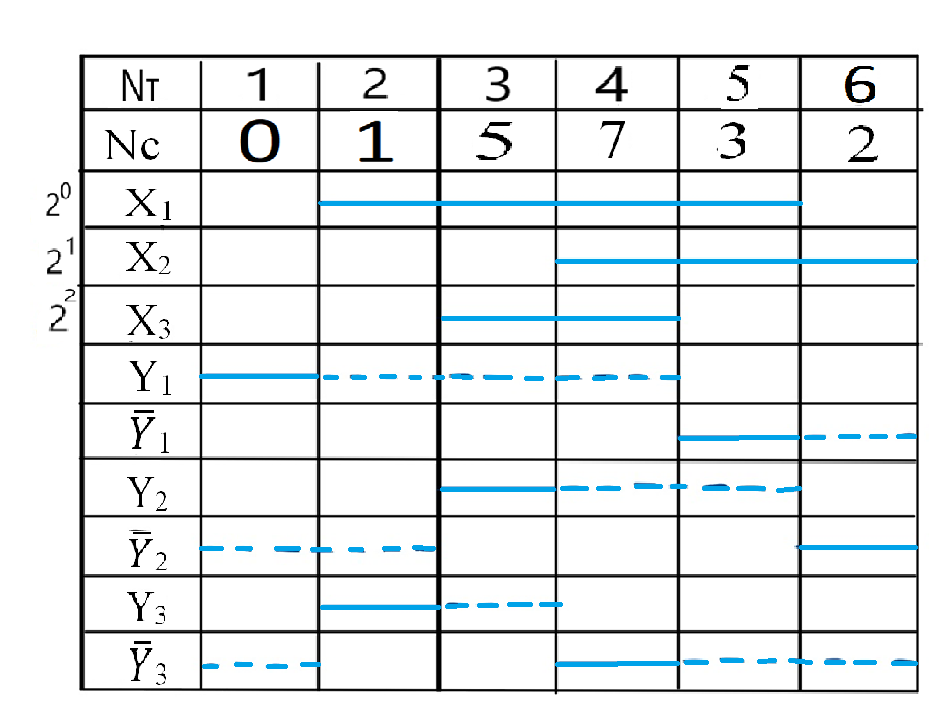 Рис.2 Таблица включений В шапке таблицы нет совпадающих тактов, значит в системе не требуется подключения дополнительных элементов памяти. Таким образом, функции сигналов управления в виде уравнений состояний системы выглядят следующим образом:  Произведем минимизацию методом Карно. Для  (рис. 3) (рис. 3)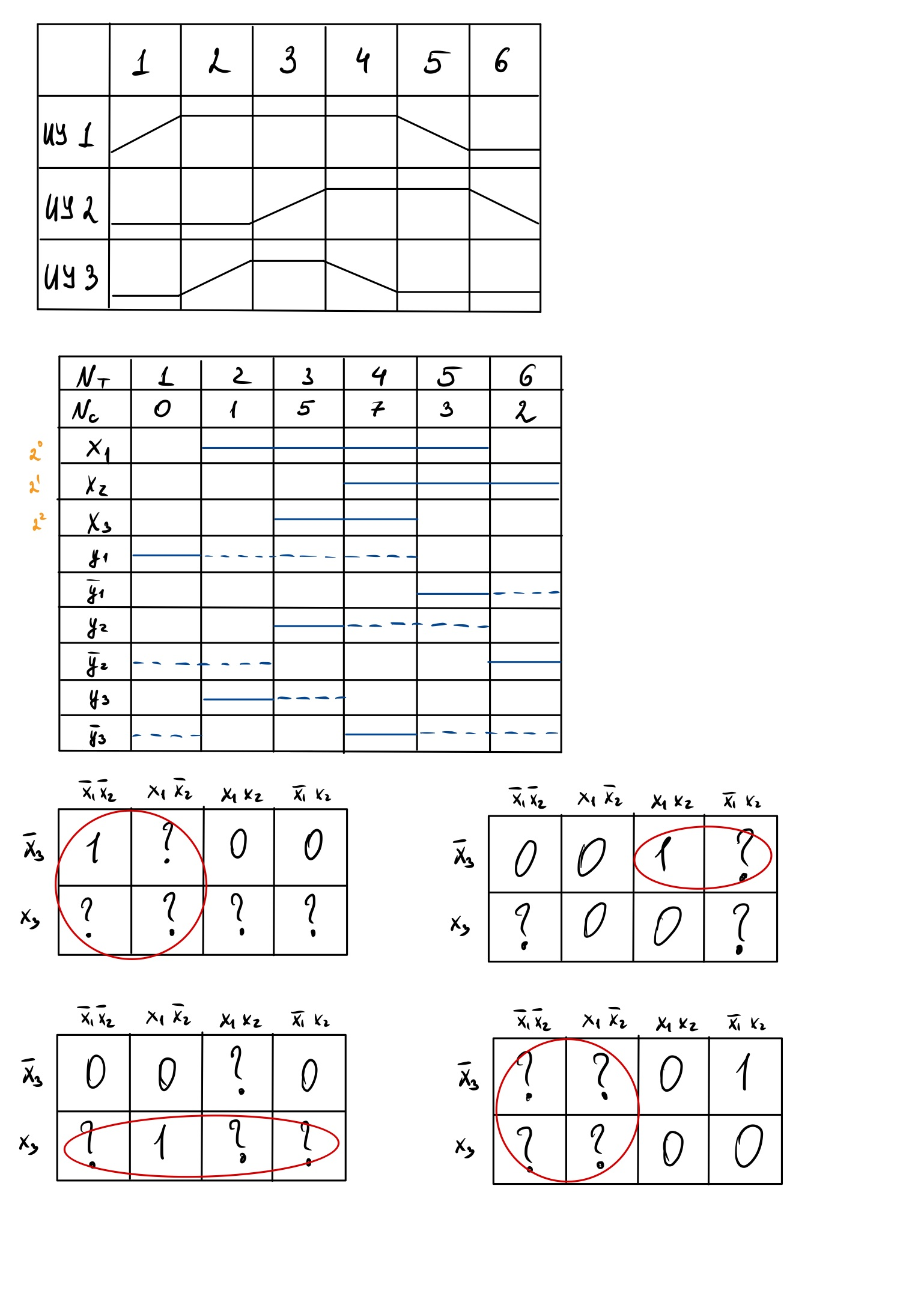 Рис.3 Карта Карно для  Сокращенное уравнение:  Для  (рис. 4) (рис. 4) Рис.4 Карта Карно для  Сокращенное уравнение:  Для  (рис. 5) (рис. 5) Рис.5 Карта Карно для  Сокращенное уравнение:  Для  (рис. 6) (рис. 6) Рис.6 Карта Карно для  Сокращенное уравнение:  Для  (рис. 7) (рис. 7)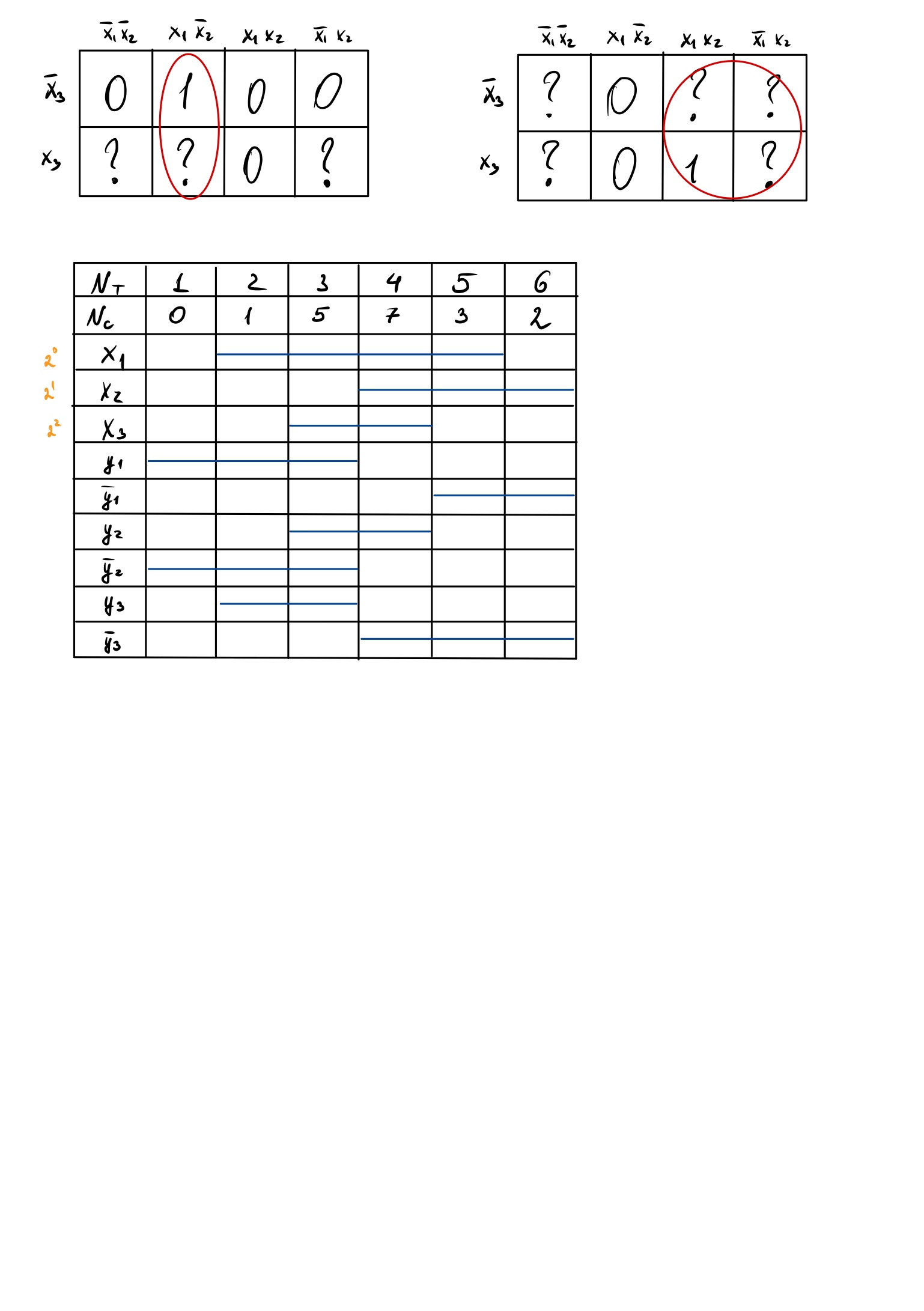 Рис.7 Карта Карно для  Сокращенное уравнение:  Для  (рис. 8) (рис. 8) Рис.8 Карта Карно для  Сокращенное уравнение:  После получения упрощенных уравнений, так как получены точные области существования функций управления, таблица включений получает завершенный вид (рис. 9): 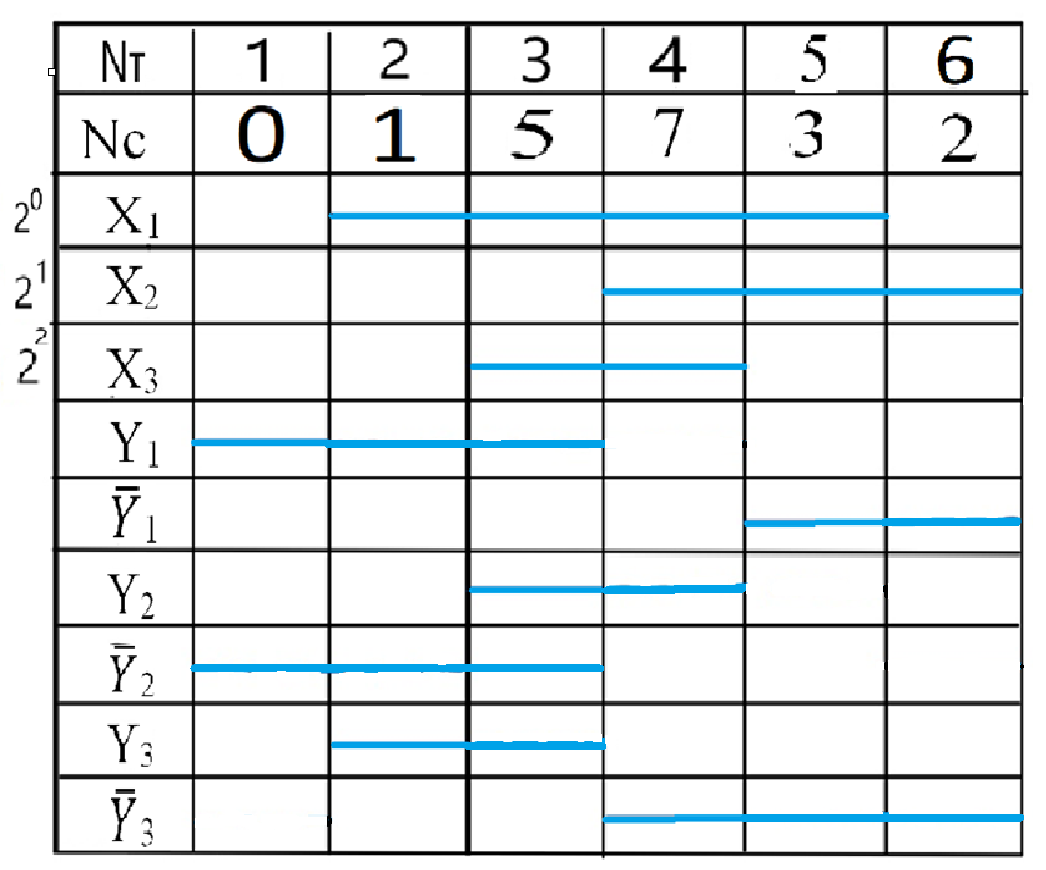 Рис.9 Таблица включений после минимизации Так же выведем уравнения свободной наладки на основе полученных ранее минимизированных функций:  На основе полученных уравнений свободной наладки создадим программу управления на языке программирования ПЛК стандарта МЭК (рис. 10). Таблица 1 – обозначения адресов сигналов на ПЛК
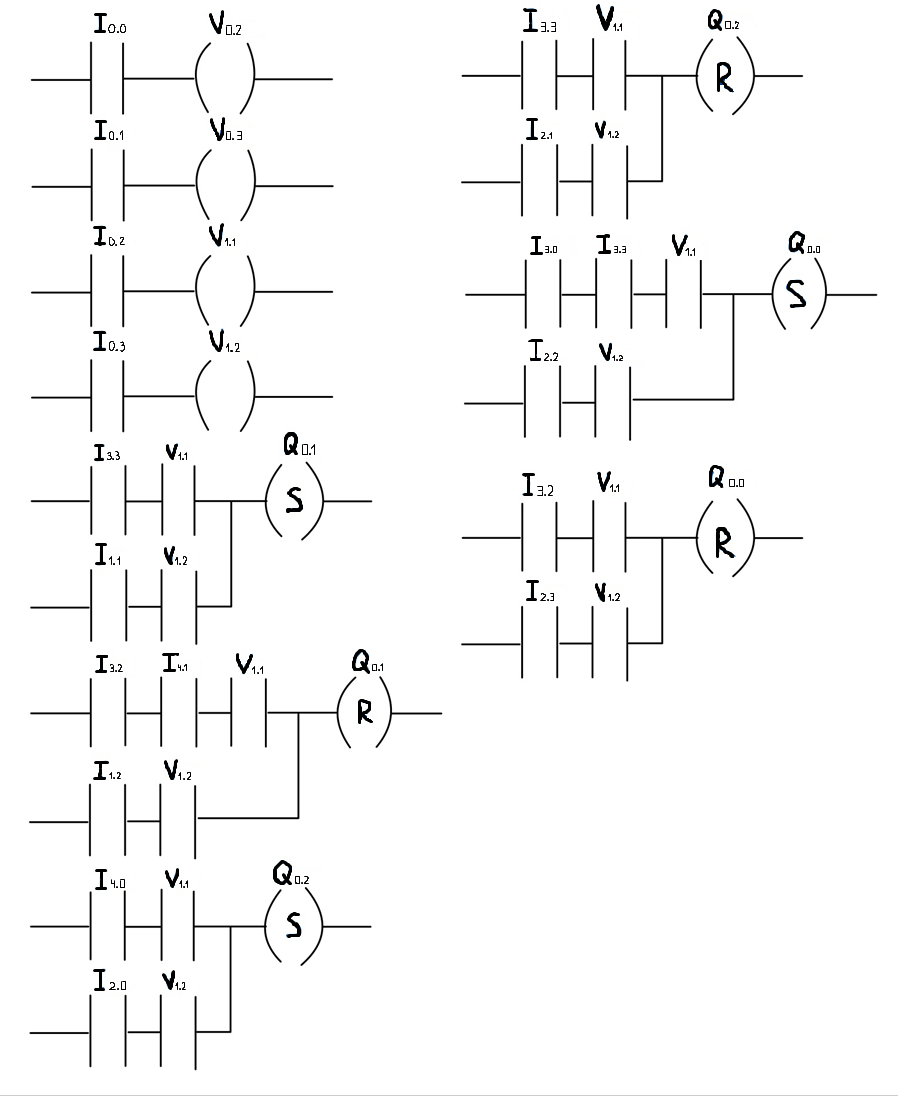 Рис.10 ПЛК управления с режимом свободной отладки Теперь составим уравнения связанной наладки.  На основе полученных уравнений связанной наладки создадим программу управления на языке программирования ПЛК стандарта МЭК (рис. 11). 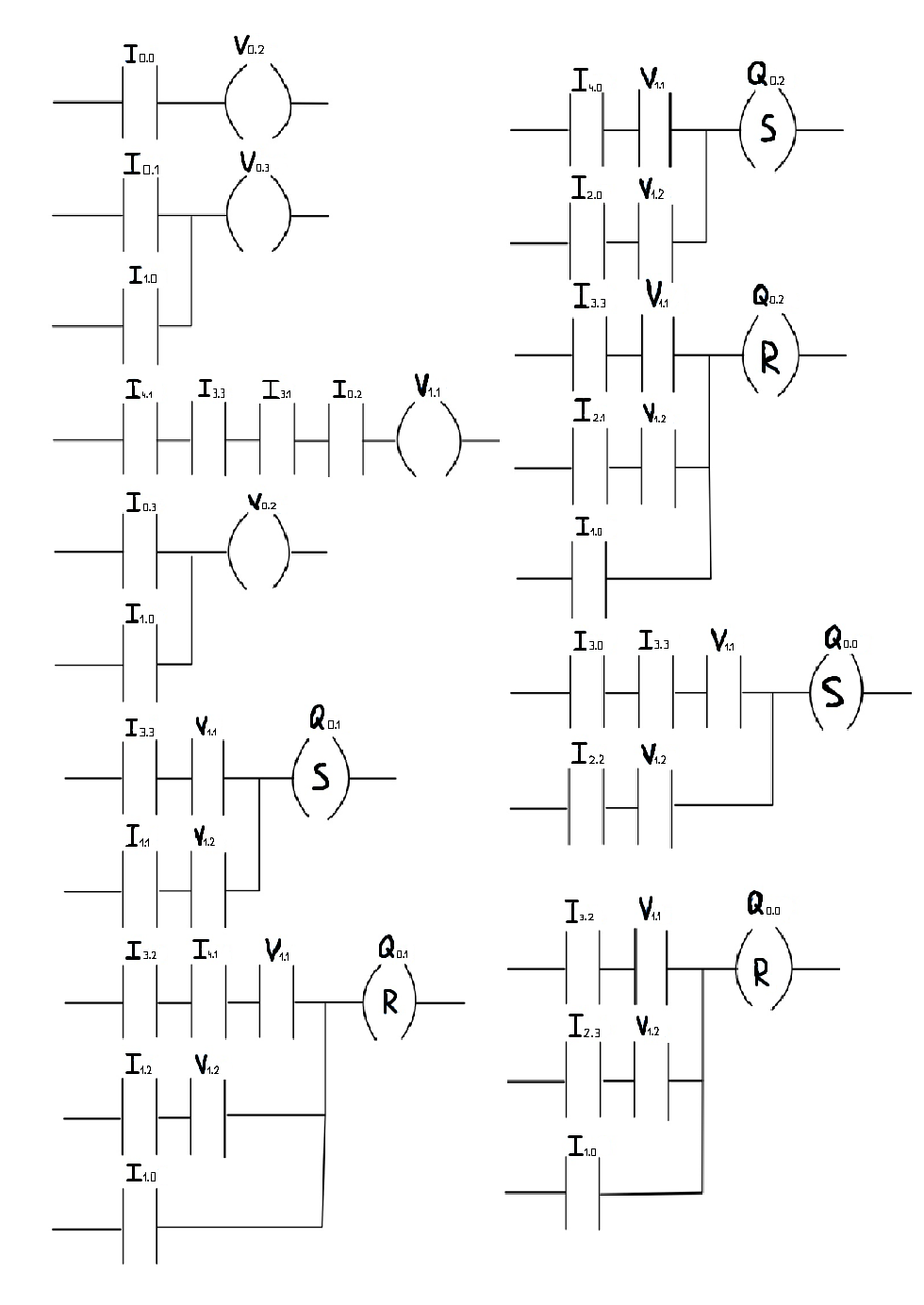 Рис.11 ПЛК управления с режимом связной отладки Вывод В ходе данной лабораторной работы я выполнил проектирование системы управления с режимами свободной и связанной наладки на основе заданного закона управления, а также разработал программы для ПЛК на основе заданного закона управления объектами системы управления. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




















 ,
, 
 ,
, 



 ,
, 
 ,
, 