ТММ. Лабораторная работа 1. Отчет по лабораторной работе Структурный анализ и синтез плоского рычажного механизма
 Скачать 134.19 Kb. Скачать 134.19 Kb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Сибирский государственный университет науки и технологий имени академика М.Ф. Решетнева» Институт машиноведения и мехатроники Кафедра основы конструирования машин ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ «Структурный анализ и синтез плоского рычажного механизма» Цель работы: рассмотреть вопросы анализа и синтеза плоских рычажных механизмов структурных схем и формул строения механизма. Структурная (кинематическая) схема механизма (см. рис. 1) 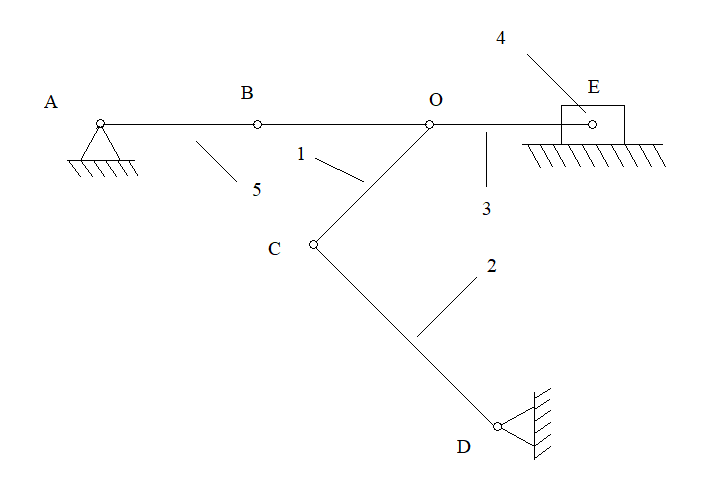 Рис 1. Структурная (кинематическая) схема механизма Рассмотрим кинематические пары и звенья механизма (таблица 1) Таблица 1. Кинематические пары и звенья механизма
Число степеней свободы механизма: n=5; P4=0; P5=7 W=3n-2P5 - P4 = 15-14-0=1, где 3 – число плоского механизма n – число подвижных звеньев P5 – кинематические пары 5-го класса P4 – кинематические пары 4-го класса Разложим механизм на структурные группы (группы Ассура) (таблица 2): Таблица 2. Кинематические цепи (группы Ассура)
W=3n-2P5 - P4 = 3·2-2·3-0 = 0 Оставшаяся часть механизма — ведущее звено ОА — имеет степень подвижности W=1. Формула строения механизма: М=П + Г1 + Г2 Определим класс групп Ассура и всего механизма (таблица 3, таблица 4): Таблица 3. Кинематические и структурные схемы механизма (кин. пары)
Таблица 4. Кинематические и структурные схемы механизма (звенья)
Вывод: мы рассмотрели вопросы анализа и синтеза плоских рычажных механизмов структурных схем и формулы строения механизма. |