УАС_ПЗ1. УАС_ПЗ1_Ларионова_19РИВСТ. Отчет по практической работе 1 по курсу Управление, администрирование и самоорганизация в распределенных информационновычислительных систем и телекоммуникациях
 Скачать 267.08 Kb. Скачать 267.08 Kb.
|

 Министерство науки и высшего образования Российской Федерации ФЕДЕРАЛЬНОЕ БЮДЖЕТНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧЕРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «ОРЕНБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» Факультет математики и информационных технологий Кафедра вычислительной техники и защиты информации ОТЧЕТ по практической работе №1 по курсу «Управление, администрирование и самоорганизация в распределенных информационно-вычислительных систем и телекоммуникациях» «Оптимизация топологии распределенной системы сбора и регистрации данных» ОГУ 09.04.01.6020.128 О Руководитель: доцент, к.т.н. _______________ Р.Р. Галимов «___»_________________2020 г. Исполнитель: студентка группы 19 ИВТ (м) РИВСТ _______________М. В. Ларионова «___»_________________2020 г.  Оренбург 2020 Содержание 1 Постановка задачи 3 2 Ход работы 4 Заключение 26 1 Постановка задачиЦель работы: освоить синергетический алгоритм и программу построения и оптимизации топологии распределенной системы сбора, регистрации и обработки данных от технологических объектов Необходимо решить следующие задачи: Провести эксперименты с использованием программы для определения координат СОД для различных конфигураций размещения ИД переборным и самоорганизующимся алгоритмом. Сделать анализ результатов экспериментов; Сделать выводы по работе и составить отчет. 2 Ход работыГлавное окно программы представлено на рисунке 1.  Рисунок 1 – Главное окно программы Выбор линейной функции представлен на рисунке 2.  Рисунок 2 – Выбор функции 2 источника данных с линейными частными целевыми функциями и координатами (100,100) и (400,100) представлены на рисунке 3.  Рисунок 3 – Источники данных Результат выполнения операции перебора представлен на рисунке 4. 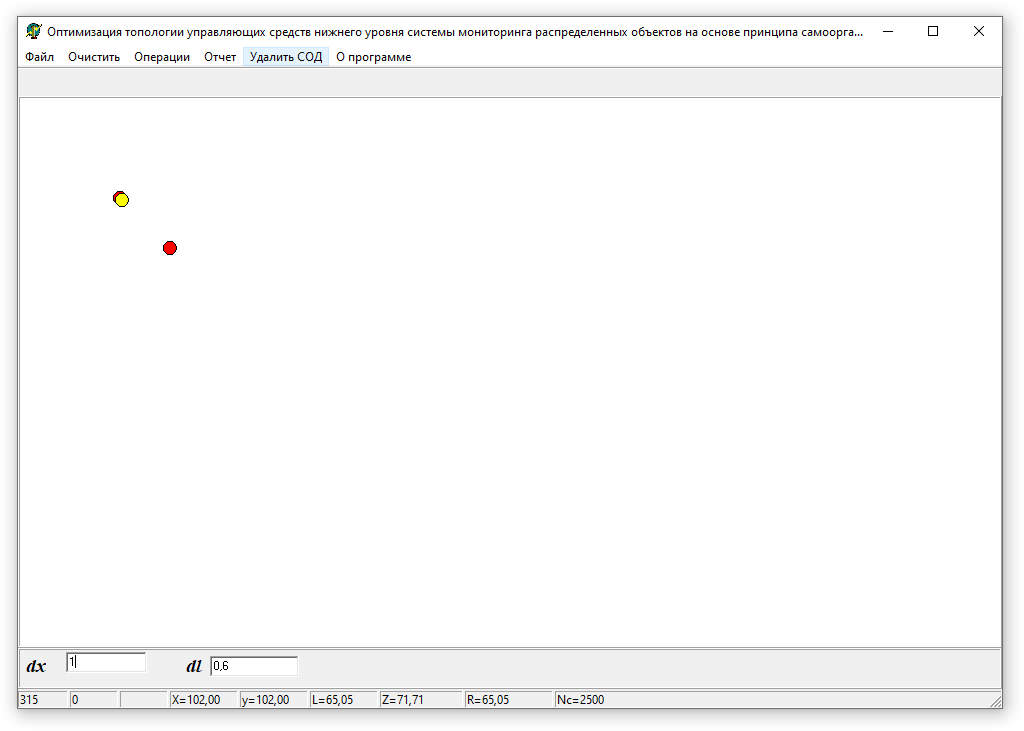 Рисунок 4 – Результат выполнения операции перебора На рисунке 5 представлен отчет о результатах выполнения операции перебора. 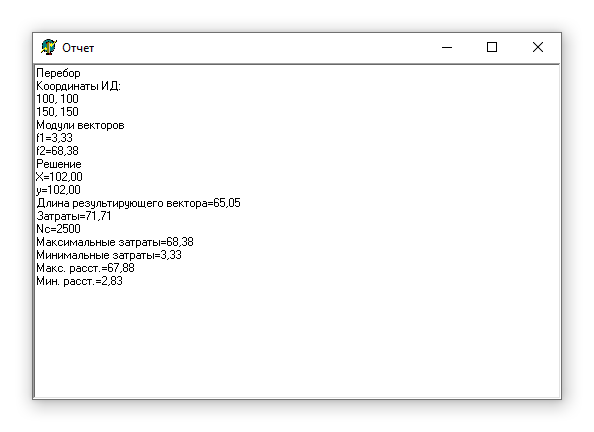 Рисунок 5 – Отчет о результатах выполнения операции перебора Результат выполнения операции самоорганизации представлен на рисунке 6. 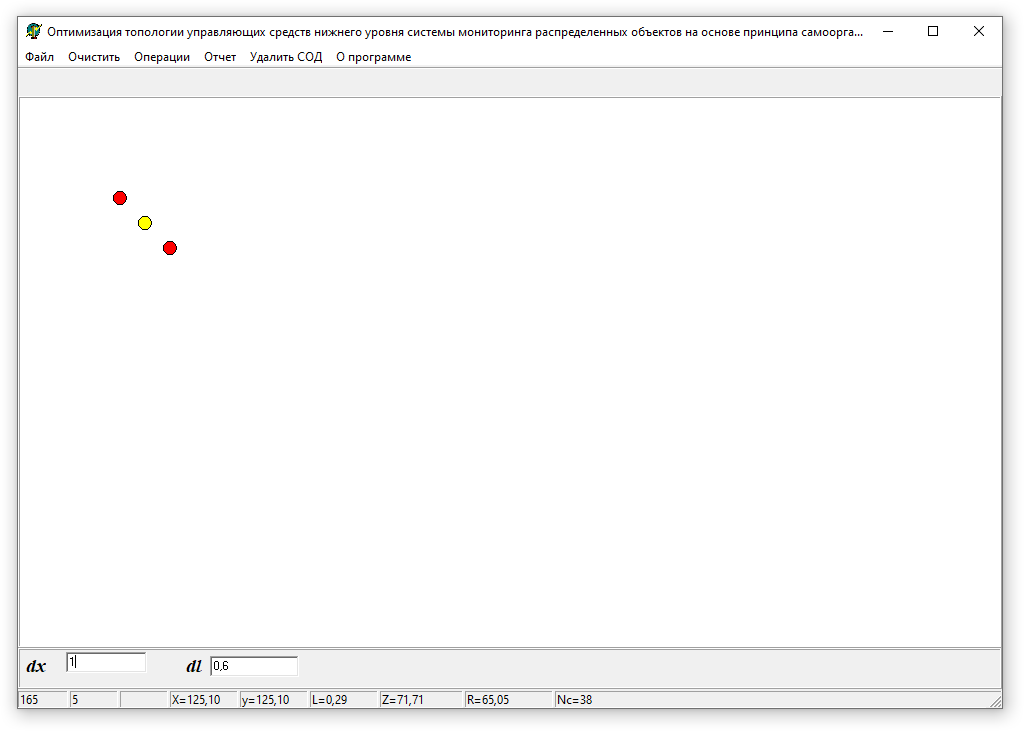 Рисунок 6 – Результат выполнения операции самоорганизации На рисунке 7 представлен отчет о результатах выполнения операции самоорганизации. 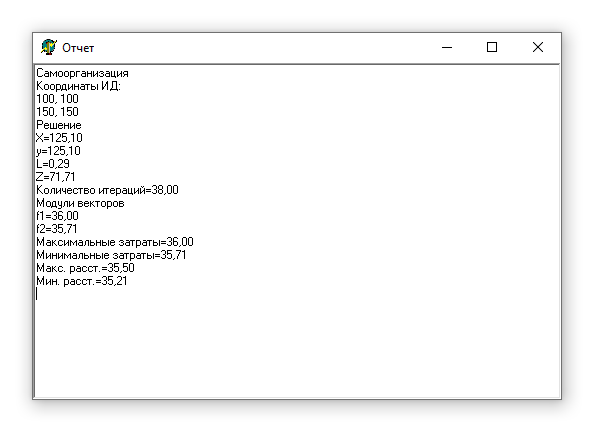 Рисунок 7 – Отчет о результатах выполнения операции самоорганизации Изменение параметров линейной функции представлен на рисунке 8.  Рисунок 8 – Параметры линейной функции Результат выполнения операции перебора с измененными параметрами представлен на рисунке 9. 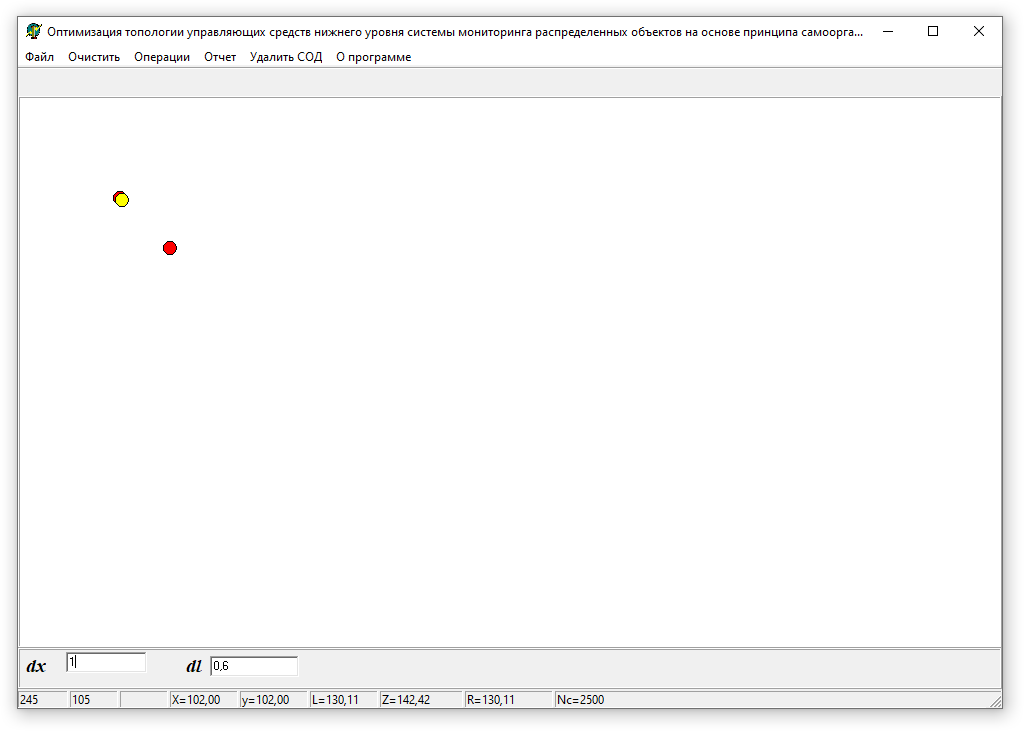 Рисунок 9 – Результат выполнения операции перебора с измененными параметрами На рисунке 10 представлен отчет о результатах выполнения операции перебора с измененными параметрами. 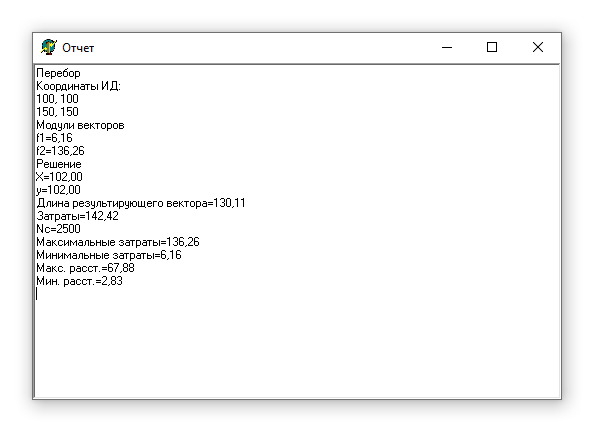 Рисунок 10 – Отчет о результатах выполнения операции перебора с измененными параметрами Очищена плоскость карты от источников данных. Размещены на плоскости карты 4 точки по вершинам квадрата со стороной A и координатами левой верхней вершины (x2, y2). В качестве частной целевой функции выбрана линейная функция с коэффициентами 2 и 1, результат представлен на рисунке 11. 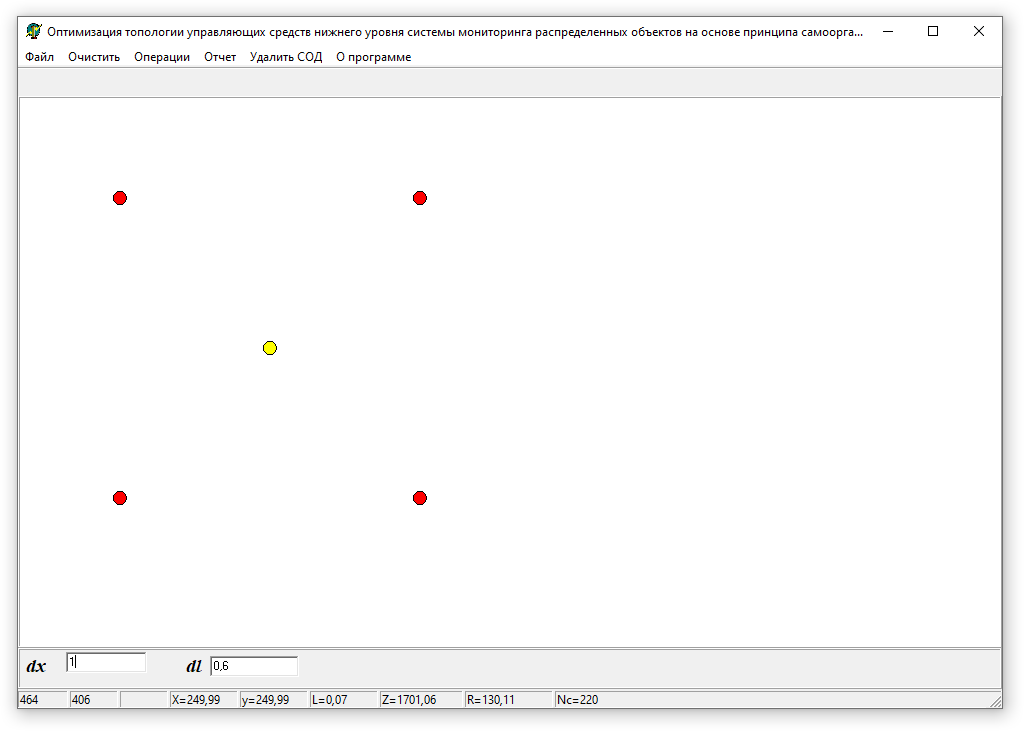 Рисунок 11 – Результат выполнения операции самоорганизации На рисунках 12-19 представлены отчеты о результатах выполнения операции самоорганизации с измененными параметрами шага итерации. 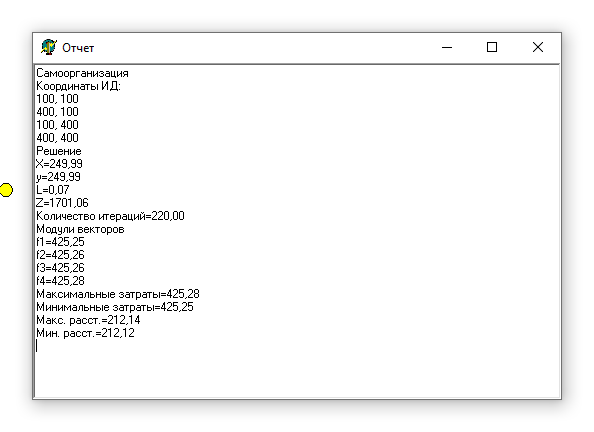 Рисунок 12 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 1 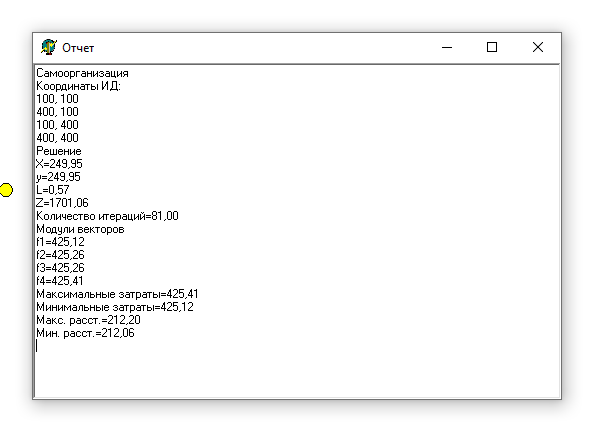 Рисунок 13 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 3 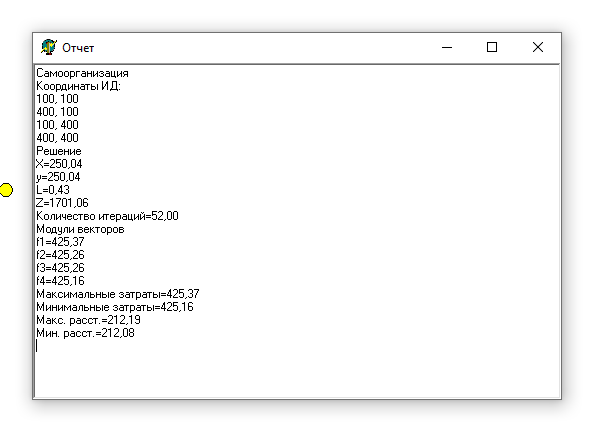 Рисунок 14 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 5 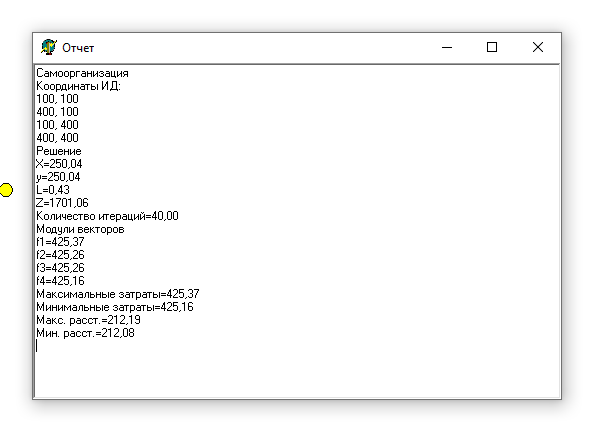 Рисунок 15 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 7 Рисунок 16 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 9 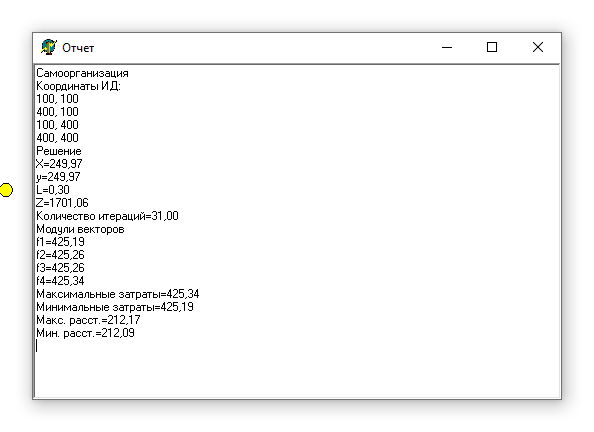 Рисунок 17 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 11 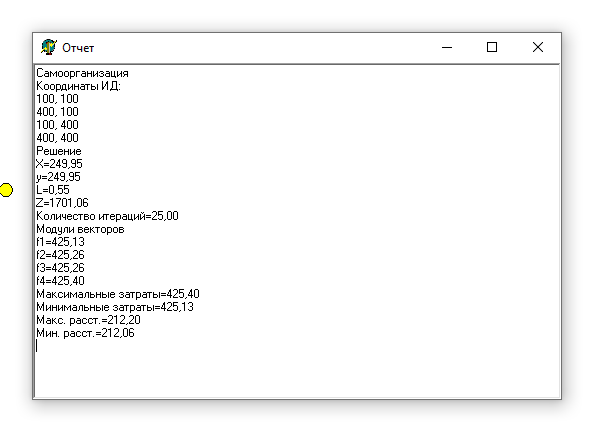 Рисунок 18 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 13 Рисунок 19 – Отчет о результатах выполнения операции самоорганизации с шагом итерации 15 Результат выполнения операции самоорганизации с измененными параметрами представлен на рисунке 20. 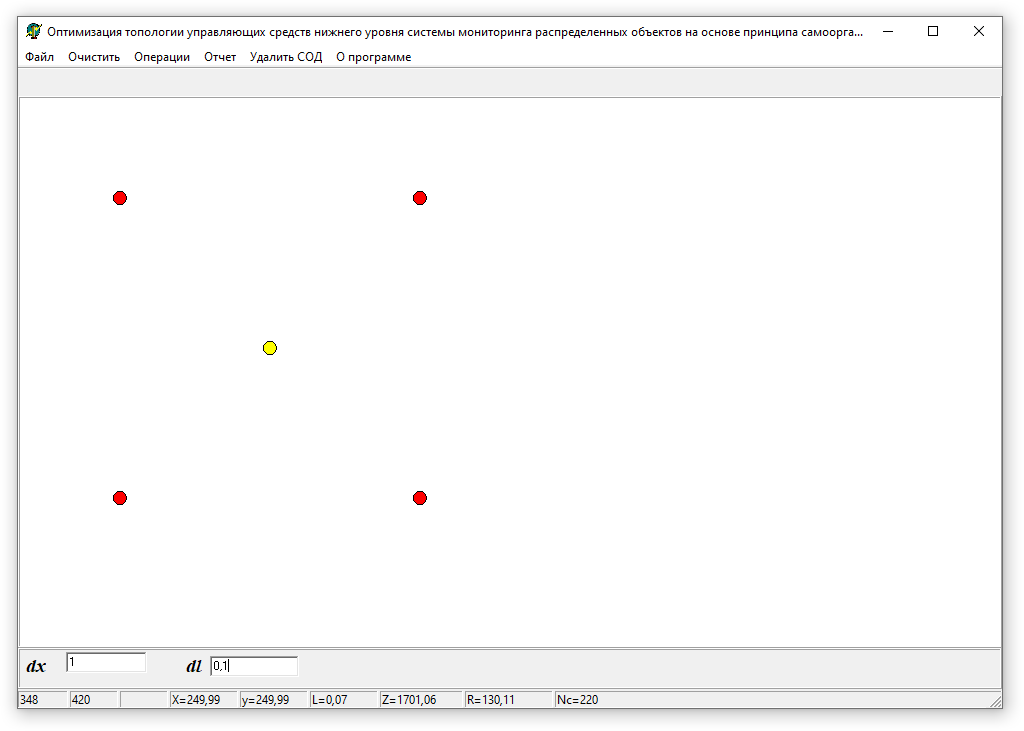 Рисунок 20 – Результат выполнения операции самоорганизации с измененными параметрами На рисунках 21-30 представлены отчеты о результатах выполнения операции самоорганизации с измененными параметрами заданной погрешности. Рисунок 21 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 0.1 Рисунок 22 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 0.6 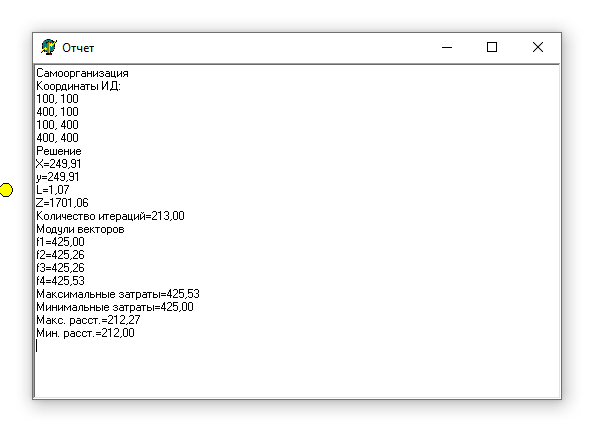 Рисунок 23 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 1.1 Рисунок 24 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 1.6 Рисунок 25 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 2.1 Рисунок 26 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 2.6 Рисунок 27 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 3.1 Рисунок 28 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 3.6 Рисунок 29 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 4.1 Рисунок 30 – Отчет о результатах выполнения операции самоорганизации с заданной погрешностью 4.6 Расположены случайным образом N источников данных и установлено значение требуемой точности расчета координат dl, как представлено на рисунках 31-32.  Рисунок 31 – Установка количества данных 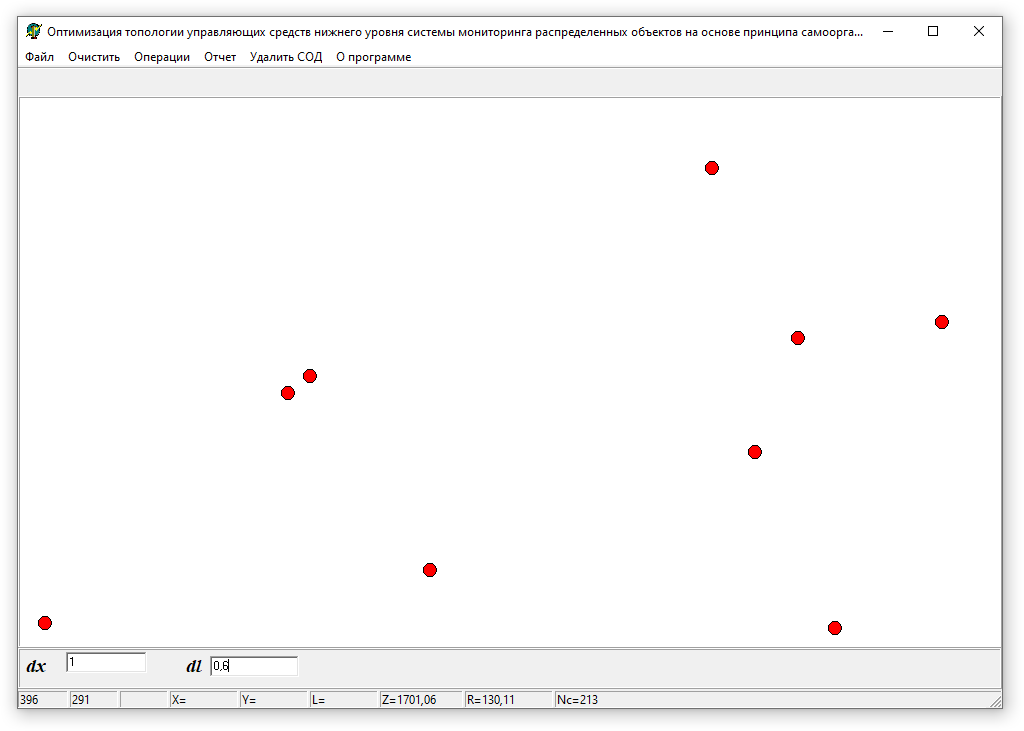 Рисунок 32 - Результат выполнения операции генерации источников данных Результат выполнения операции самоорганизации представлен на рисунке 33. 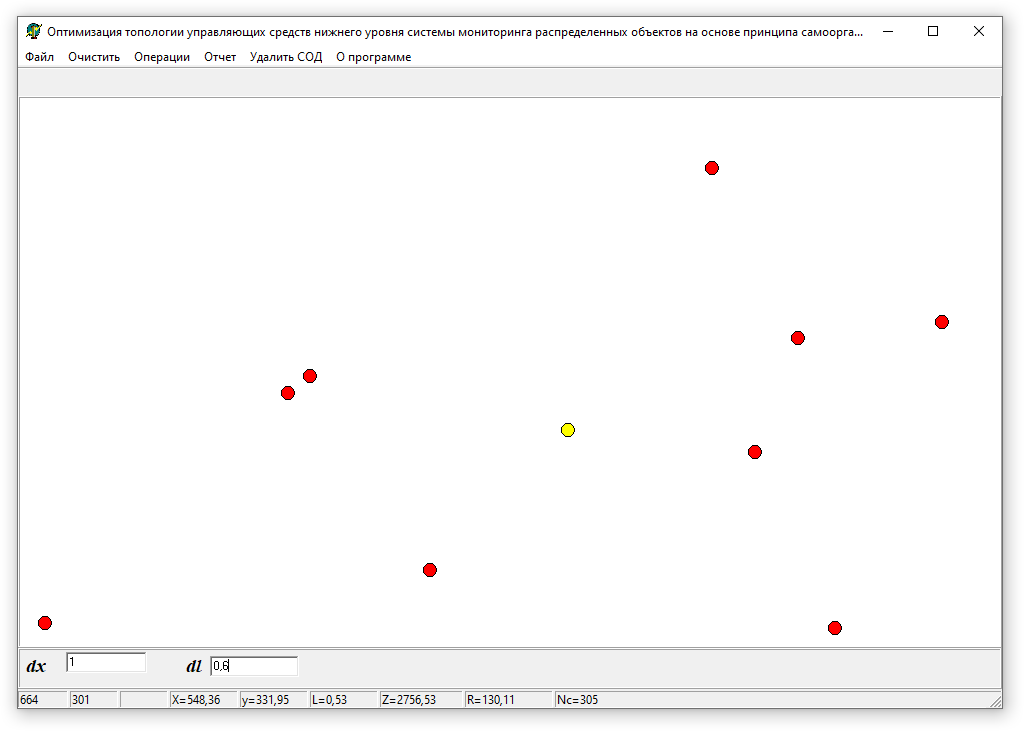 Рисунок 33 - Результат выполнения операции самоорганизации На рисунке 34 представлен отчет о результатах выполнения операции самоорганизации. 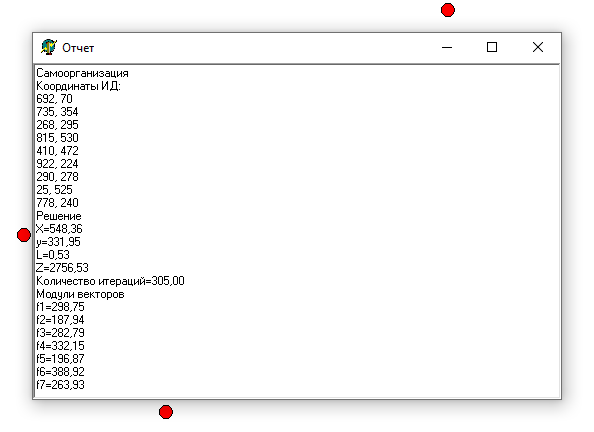 Рисунок 34 – Отчет о результатах выполнения операции самоорганизации ЗаключениеВ результате выполнения практической работы был освоен синергетический алгоритм и программа построения и оптимизации топологии распределенной системы сбора, регистрации и обработки данных от технологических объектов Решены следующие задачи: Проведены эксперименты с использованием программы для определения координат СОД для различных конфигураций размещения ИД переборным и самоорганизующимся алгоритмом. Сделан анализ результатов экспериментов; Сделаны выводы по проделанной работе. |