Отчет по практической работе. Отчет по практической работе Структурные схемы измерительных преобразователей
 Скачать 279.46 Kb. Скачать 279.46 Kb.
|

|
СГТУ имени Гагарина Ю.А. Энгельсский технологический институт (филиал) федерального государственного бюджетного образовательного учреждения высшего образования «Саратовский государственный технический университет имени Гагарина Ю.А.» (ЭТИ (филиал) СГТУ имени Гагарина Ю.А.) Отчет по практической работе «Структурные схемы измерительных преобразователей» МДК.01.01 Техналаогия систем формирования автоматического управления типовых технологических процессов, средств измерений, несложных мехатронных устройств и систем. Выполнил студент: Фаизов Рафаэль Ренатович группа АТП-304 Научный руководитель: Денисов Владимир Александрович Оценка ________________________ Энгельс 2023 Содержание Введение………………………………….………………………………………..3 Типы измерительных преобразователей..……………………………………….4 Датчики с обратной связью………….………………………………………..….6 Заключение………………………………………………………………………...7 Список использованных источников ……………………………………………8 Введение Измерительный преобразователь (ИП) - это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем. Другими словами, измерительный преобразователь - это техническое устройство, построенное на определенном физическом принципе или эффекте, выполняющее одно частное измерительное преобразование. В общем случае по виду входных и выходных физических величин ИП можно подразделить на преобразователи неэлектрических величин в неэлектрические, неэлектрических величин в электрические, электрических величин в электрические, электрических величин в неэлектрические. Если рассмотреть в самом общем виде структурную схему простейшей измерительной системы (рисунок 2.1), то в ней мы можем найти все виды перечисленных ИП. 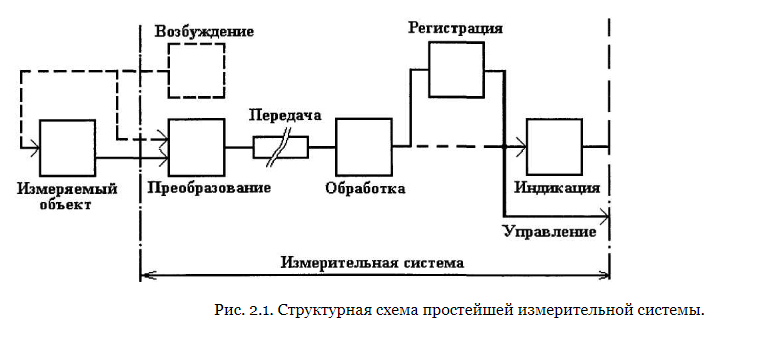 Преобразователь - первый элемент измерительной системы - является основным источником электрического сигнала, тогда как остальная часть цепи должна обеспечить передачу, обработку и использование сигнала. Электрический сигнал - это переменная составляющая тока или напряжения, которая несет информацию, связанную со значением измеряемой величины; амплитуда и частота сигнала должны быть непосредственно связаны с амплитудой или частотой измеряемой величины 1. Преобразователь - первый элемент измерительной системы - является основным источником электрического сигнала, тогда как остальная часть цепи должна обеспечить передачу, обработку и использование сигнала. Электрический сигнал - это переменная составляющая тока или напряжения, которая несет информацию, связанную со значением измеряемой величины; амплитуда и частота сигнала должны быть непосредственно связаны с амплитудой или частотой измеряемой величины 1.Типы измерительных преобразователей. Несмотря на все многообразие ИП, их структурные схемы можно свести к нескольким типам (табл. 2.1). Структурная схема прямого однократного преобразования реализуется во многих ИП с естественными выходными сигналами (например, в термопарах, датчиках давления и разрежения), в которых измеряемая величина преобразуется непосредственно в электрический сигнал, перемещение или усилие. Статическая характеристика, погрешность и другие свойства здесь полностью определяются параметрами самого чувствительного элемента. В тех случаях, когда первичное преобразование не позволяет получить удобный или требуемый для дальнейшего использования сигнал, применяют структурные схемы с несколькими последовательными преобразованиями, например при необходимости получение унифицированного выходного сигнала, преобразования неэлектрической величины в электрическую, коррекции статической или динамической характеристики преобразователя. Суммарный коэффициент преобразования (общая чувствительность), равный произведению коэффициентов преобразования отдельных звеньев ИП, можно получить достаточно высоким, однако при этом увеличивается общая погрешность преобразования, равная сумме погрешностей составляющих звеньев. В датчиках, построенных по дифференциальной схеме, измеряемая величина подается одновременно на два идентичных измерительных преобразователя. Выходной сигнал датчика пропорционален разности выходных сигналов ИП каждого из каналов. Если выходные сигналы имеют одинаковые знаки, то орган сравнения выполняет операцию вычитания, если знаки разные — операцию суммирования. Возможны варианты, когда на один из входов подается эталонный сигнал и сравнение осуществляется с ним или информация преобразуется по одному каналу в реальных условиях, а по другому — в эталонных. К достоинствам дифференциальных схем построения датчиков следует отнести: - значительное уменьшение аддитивных (постоянных) составляющих общей погрешности, обусловленных воздействием возмущающих факторов; - увеличение чувствительности вдвое при подаче входного сигнала на оба входа; - получение реверсивной статической характеристики; - снижение нелинейности статической характеристики и постоянных составляющих выходного сигнала по сравнению с характеристиками отдельных ИП, входящих в схему. 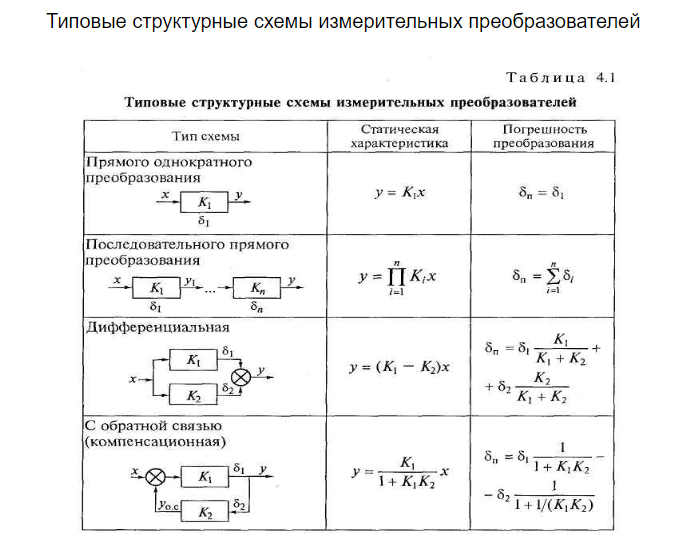 В формулах приняты следующие обозначения: x — измеряемая величина; у — выходная величина; δi — погрешность звена преобразователя; δП — общая погрешность преобразователя; K — коэффициент преобразования В формулах приняты следующие обозначения: x — измеряемая величина; у — выходная величина; δi — погрешность звена преобразователя; δП — общая погрешность преобразователя; K — коэффициент преобразованияНаиболее совершенной схемой ИП является схема с обратной связью, или компенсационная схема. В датчиках, построенных по этой схеме, обеспечивается автоматическое уравновешивание контролируемой величины компенсирующей величиной того же рода непосредственно или после предварительного преобразования. Основное достоинство такой схемы состоит в ее способности компенсировать значительные изменения параметров измерительного тракта. Кроме того, основная часть энергии, необходимой для работы датчика, берется от дополнительных источников, а не от измерительного элемента. Преобразователи с отрицательной обратной связью (ООС) принципиально точнее, чем схемы прямого последовательного преобразования. Отрицательная обратная связь существенно снижает влияние погрешностей звеньев прямой цепи на результат преобразования. Любые ошибки и возмущение звена, не охваченного обратной связью, полностью передаются на выход преобразователя, поэтому при'построении ИП целесообразно стремиться к тому, чтобы охватить обратной связью как можно больше звеньев. При величине K1K2= 20...30, что нетрудно обеспечить на практике, общая погрешность преобразования практически определяется только погрешностью δ2 обратной связи, вследствие чего требования к погрешности δ1 прямого канала можно значительно снизить (см. табл. 2.1). Датчики с обратной связью Датчики с обратной связью обладают высокой чувствительностью и позволяют легко изменять параметры настройки путем изменения коэффициентов преобразования обратной цепи. Структурные схемы реальных ИП могут представлять собой любую комбинацию из рассмотренных выше типовых структур. В цепи последовательного преобразования измеряемого сигнала принято различать первичный измерительный преобразователь (чувствительный элемент) и промежуточные преобразователи (рис. 2.2). Измеряемая величина воздействует непосредственно на первичный преобразователь. Очень часто метод первичного преобразования входной величины определяет наименование всего измерительного преобразователя или прибора. Промежуточные преобразователи могут выполнять функции усиления, линеаризации, преобразования рода сигнала и др. В частности, на рис. 2.2 представлена упрощенная схема ИП с естественным и унифицированным выходами. 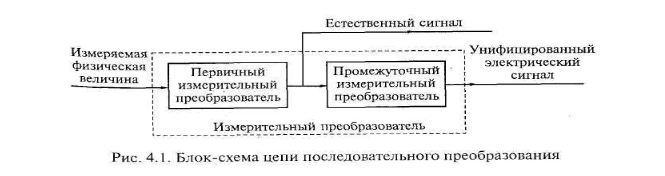 Заключение Производством измерений человечество занимается с давних времен, еще за четыре тысячелетия до нашей эры древние вавилоняне проводили астрономические измерения. Строительство египетских пирамид было бы невозможным без производства измерений. Развитие науки и производства требовало увеличения количества измерений, повышения их точности, включения в круг измеряемых все новых и новых величин. Исторически развитие измерительной техники неразрывно связано с развитием потребностей общества. Современные условия характеризуются ускоренным развитием науки и промышленного производства, что немыслимо без широчайшего применения самых разнообразных измерений и измерительных устройств. Список использованных источников 1. Алатырев М.С. Теоретические и экспериментальные исследования низкоскоростной системы электропривода / М.С. Алатырев // Сб. трудов ЛПИ. – Ленинград, 1974. 2. Андрощук В.В. Системы измерений и датчики средней и мгновенной скорости на полупроводниках / В.В. Андрощук, С.А. Ковчин, В.Н. Шарахин // Известия вузов. Электромеханика. – 1967. – № 12. 3. Атамалян Э.Г. Приборы и методы измерения электрических величин: учеб. пособие / Э.Г. Атамалян. – М.: Высшая школа, 1982. – 223 с. 4. Ахметжанов А.А. Высокоточные системы передачи угла автоматических устройств / А.А. Ахметжанов. – М.: Энергия, 1976. – 287 с. 5. Ахметжанов А.А. Системы передачи угла повышенной точности / А.А. Ахметжанов. – М.: Энергия, 1966. – 272 с. 6. Баканов М.В. Информационные микромашины следящих и счетнорешающих систем / М.В. Баканов, В.А. Лыска, В.В. Алексеев. – М.: Советское радио, 1977. – 88 с. 7. Дискретные датчики систем управления электроприводами / А.В. Бирюков [и др.] // Электропривод. – 1976. – № 6 (50). 8. Богорад Г.З. Цифровые регуляторы и измерители скорости / Г.З. Богорад, В.А. Киблицкий. – М.: Энергия, 1966. 9. Бычатин Д.А. Поворотный индуктасин / Д.А. Бычатин, И.Я. Гольдман. – Л.: Энергия, 1961. – 90 с. |