Методы оценки качества сегментации изображений. Отчет по курсу. Отчет защищен с оценкой преподаватель профессор, доктор т н
 Скачать 2.65 Mb. Скачать 2.65 Mb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное автономное образовательное учреждение высшего образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ» КАФЕДРА № 22 ОТЧЕТ ЗАЩИЩЕН С ОЦЕНКОЙ ПРЕПОДАВАТЕЛЬ
РАБОТУ ВЫПОЛНИЛ
Санкт-Петербург 2020 ВВЕДЕНИЕВ настоящее время компьютеры еще не научились «видеть» так, как это может человек. Человеческая система зрения способна опираться на собственные догадки, знания о прошлом и предположения. На текущий момент фотокамеры не способны думать, как человек, а должны производить операции по вычислениям и расчетам каждого пикселя, чтобы в целом собрать картину, основываясь на разработанных человеком обучающих базах, чтобы предположить какой объект находится перед ним (пример, фокусировка по лицам). В данный момент разработано множество алгоритмов детектирования, распознавания и отслеживания, большое количество уникальных методов способно обрабатывать изображения таким образом, чтобы определить уникальные свойства присущие именно этому изображению (например, нахождение на снимке человека или любого другого объекта). Компьютерное (машинное) зрение — это множество технологий, методов и алгоритмов, разработанных с целью детектирования и классификации объектов, а также отслеживания их перемещения в пространстве. В качестве научной дисциплины, её можно отнести к теории и технологии разработки систем (программных), которые получают информацию из видео или фотоизображений. Как известно видеоданные это последовательно идущие друг за другом ряд изображений (кадров), каждый из которых может использоваться для обработки алгоритмами компьютерного зрения с целями указанными выше. В качестве технологической дисциплины, машинное зрение стремится применять созданные человеком технологии, методы и алгоритмы с целью создания высокотехнологичных систем. В качестве примера можно назвать такие системы: Управления процессами (автопилотируемый транспорт, промышленные установки); Видеонаблюдения; Организации информации (создания и сохранения баз данных с фото- и видеоизображениями); Моделирования объектов или окружающей среды (топография и медицинские визуальные данные) Взаимодействия (управление машинами, опираясь на движения человека); Дополнительной реальности; Цифровой обработки фото- и видеоизображений. Пока что машинное зрение нельзя представить как замену биологическому зрению, но как дополнение – вполне. Изучив физиологию человека и животных, в процессе познания биологии, люди научились создавать модели зрительного восприятия. Другими словами, люди и животные – прообраз моделей компьютерного зрения. Таким образом, получившийся обмен знаниями между компьютерным и биологическим зрением являлся очень продуктивным для обеих научных дисциплин. Распознавание изображений в системах дистанционного наблюдения может быть полезно в поиске и определении малых целей, выполнении задач обнаружения, выделения, селекции и локализации объектов различной формы на изображениях. Ярким примером этого могут служить системы дистанционного радиовидения, использующие телевизионные и инфракрасные камеры, обзорные радиолокаторы с синтезированной апертурой, лазерные и акустические локаторы. При этом круг решаемых задач включает идентификацию объектов, слежение за ними, сопоставление и совмещение изображений от разнородных датчиков, индексацию и восстановление изображений. Например, дает возможность найти суда, у которых специально или вследствие аварии отключен сигнал слежения, а также определении других предметов интереса на цифровых изображениях. Одним из методов обработки изображений, о котором пойдет речь ниже, является пороговая обработка. Этот метод занимает одно из центральных мест в прикладных задачах сегментации изображений. Под сегментацией изображений понимают разделение исходного изображения на составляющие его области или объекты [1]. Такой подход в обработке изображений на сегодняшний день нашел очень широкое применение. Конечный результат зачастую определяется точностью сегментации, поэтому при выборе того или иного метода сегментации нужно уделять большое внимание надежности алгоритма. Однако, единого, общепризнанного подхода, который бы лежал в основе большинства алгоритмов, нет. Нет также и единого алгоритма, который позволял бы проводить приемлемую сегментацию для любого изображения. В этом и заключается одна из сложностей сегментации, и это является причиной большого числа различных подходов при решении данных задач обработки изображений. ОглавлениеВВЕДЕНИЕ 2 1 Теоретическая часть 6 1.1 Существующие методы сегментации на изображениях 6 1.1.1 Алгоритм сегментации по водоразделам (WaterShed) 6 1.1.2 Алгоритм сегментации MeanShift 10 1.1.3 Алгоритм сегментации FloodFill 13 1.1.4 Алгоритм сегментации GrabCut 15 1.2 Многопороговая обработка изображений 20 1.3 Геометрические критерии 22 1.4 Существующие методы оценки качества сегментации изображений 25 1.5 Существующие завки на патенты и изобретения включающие алгоритмы близкие к теме диссертации 28 2 Основная часть 31 2.1 Цели и задачи 31 2.2 Моделируемые задачи 32 2.3 Тестируемый алгоритм 32 2.4 Результаты работы 32 ЗАКЛЮЧЕНИЕ 33 ПРИЛОЖЕНИЕ А 34 БИБЛИОГРАФИЯ 35 1 Теоретическая часть1.1 Существующие методы сегментации на изображенияхСегментация изображения — это разбиение изображения на множество покрывающих его областей. Сегментация применяется во многих областях, например, в производстве для индикации дефектов при сборке деталей, в медицине для первичной обработки снимков, также для составления карт местности по снимкам со спутников. Для тех, кому интересно разобраться, как работают такие алгоритмы, добро пожаловать под кат. Мы рассмотрим несколько методов из библиотеки компьютерного зрения OpenCV. 1.1.1 Алгоритм сегментации по водоразделам (WaterShed)  Алгоритм работает с изображением как с функцией от двух переменных f=I(x,y), где x,y – координаты пикселя:   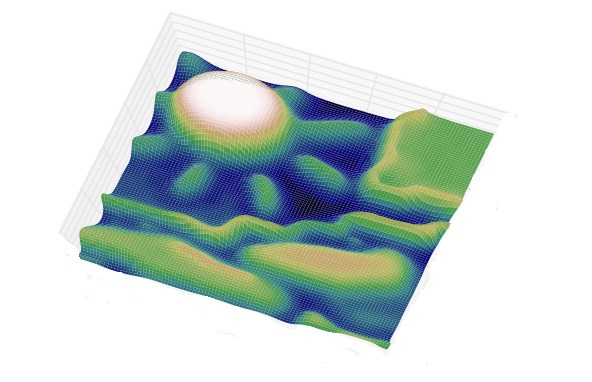 ВСЕ ВСТАВЛЕННЫЕ ИЗОБРАЖЕНИЯ БУДУТ ИЗМЕНЕНЫ НА СОБСТВЕННЫЕ ТЕСТИРУЕМЫЕ КАРТИНКИ ДЛЯ ИСКЛЮЧЕНИЯ ЗАИМСТВОВАНИЯ Значением функции может быть интенсивность или модуль градиента. Для наибольшего контраста можно взять градиент от изображения. Если по оси OZ откладывать абсолютное значение градиента, то в местах перепада интенсивности образуются хребты, а в однородных регионах – равнины. После нахождения минимумов функции f, идет процесс заполнения “водой”, который начинается с глобального минимума. Как только уровень воды достигает значения очередного локального минимума, начинается его заполнение водой. Когда два региона начинают сливаться, строится перегородка, чтобы предотвратить объединение областей [2]. Вода продолжит подниматься до тех пор, пока регионы не будут отделяться только искусственно построенными перегородками (рис.1). 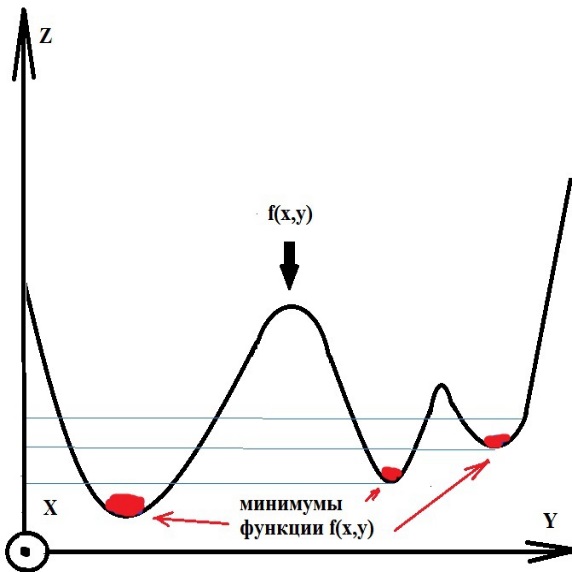 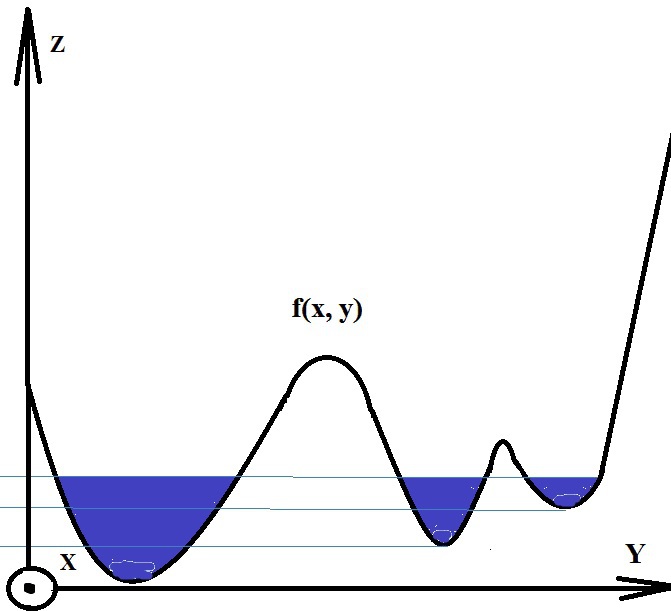 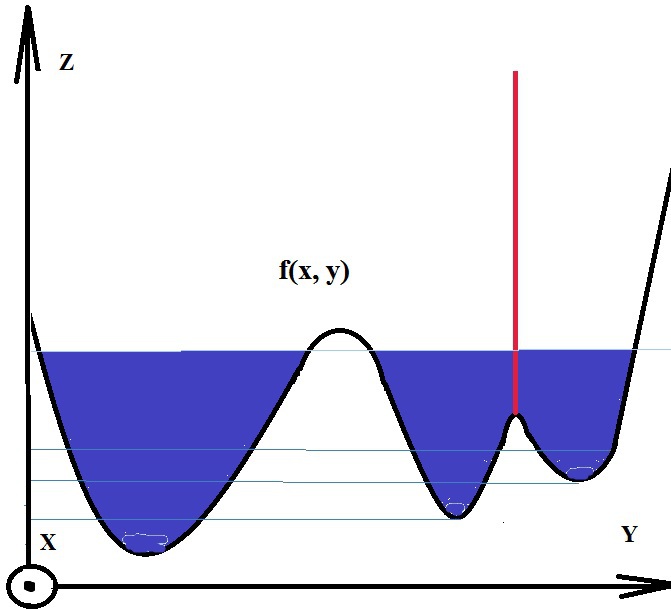 Рис.1. Иллюстрация процесса заполнения водой Такой алгоритм может быть полезным, если на изображении небольшое число локальных минимумов, в случае же их большого количества возникает избыточное разбиение на сегменты. Например, если непосредственно применить алгоритм к рис. 2, получим много мелких деталей рис. 3.  Рис. 2. Исходное изображение 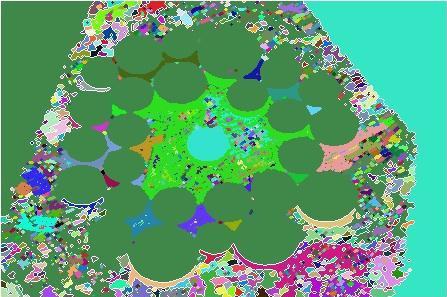 Рис. 3. Изображение после сегментации алгоритмом WaterShed В результате работы алгоритма мы получаем маску с сегментированным изображением, где пиксели одного сегмента помечены одинаковой меткой и образуют связную область. Основным недостатком данного алгоритма является использование процедуры предварительной обработки для картинок с большим количеством локальных минимумов (изображения со сложной текстурой и с обилием различных цветов). 1.1.2 Алгоритм сегментации MeanShiftMeanShift группирует объекты с близкими признаками. Пиксели со схожими признаками объединяются в один сегмент, на выходе получаем изображение с однородными областями.   Например, в качестве координат в пространстве признаков можно выбрать координаты пикселя (x, y) и компоненты RGB пикселя. Изобразив пиксели в пространстве признаков, можно заметить сгущения в определенных местах. 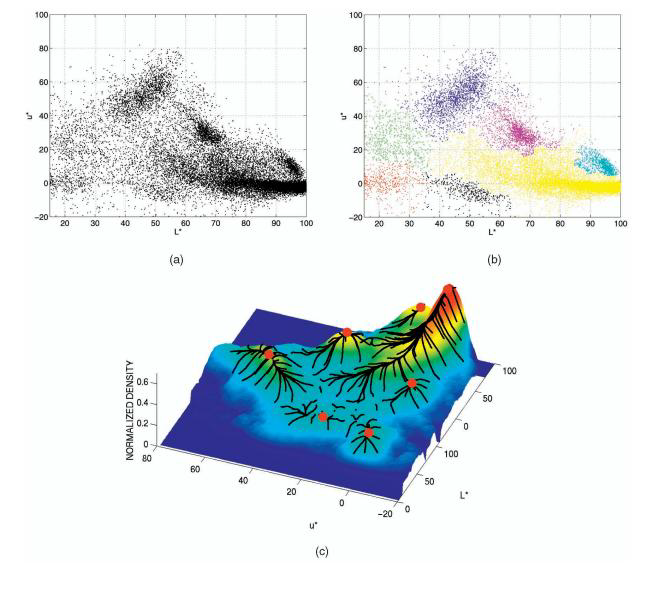 Чтобы легче было описывать сгущения точек, вводится функция плотности:  При выборе в качестве признаков координат пикселей и интенсивностей по цветам в один сегмент будут объединяться пиксели с близкими цветами и расположенные недалеко друг от друга. Соответственно, если выбрать другой вектор признаков, то объединение пикселей в сегменты уже будет идти по нему. Например, если убрать из признаков координаты, то небо и озеро будут считаться одним сегментом, так как пиксели этих объектов в пространстве признаков попали бы в один локальный максимум. Если объект, который хотим выделить, состоит из областей, сильно различающихся по цвету, то MeanShift не сможет объединить эти регионы в один, и наш объект будет состоять из нескольких сегментов. Но зато хорошо справиться с однородным по цвету предметом на пестром фоне. Ещё MeanShift используют при реализации алгоритма слежения за движущимися объектами [5]. 1.1.3 Алгоритм сегментации FloodFillС помощью FloodFill (заливка или метод «наводнения») можно выделить однородные по цвету регионы. Для этого нужно выбрать начальный пиксель и задать интервал изменения цвета соседних пикселей относительно исходного. Интервал может быть и несимметричным. Алгоритм будет объединять пиксели в один сегмент (заливая их одним цветом), если они попадают в указанный диапазон. На выходе будет сегмент, залитый определенным цветом, и его площадь в пикселях. Такой алгоритм может быть полезен для заливки области со слабыми перепадами цвета однородным фоном. Одним из вариантов использования FloodFill может быть выявление поврежденных краев объекта. Например, если, заливая однородные области определенным цветом, алгоритм заполнит и соседние регионы, то значит нарушена целостность границы между этими областями. Ниже на изображении можно заметить, что целостность границ заливаемых областей сохраняется:   Рис. 10, 11. Исходное изображение и результат после заливки нескольких областей А на следующих картинках показан вариант работы FloodFill в случае повреждения одной из границ в предыдущем изображении.   Рис. 12, 13. Иллюстрация работы FloodFill при нарушение целостности границы между заливаемыми областями 1.1.4 Алгоритм сегментации GrabCutЭто интерактивный алгоритм выделения объекта, разрабатывался как более удобная альтернатива магнитному лассо (чтобы выделить объект, пользователю требовалось обвести его контур с помощью мыши). Для работы алгоритма достаточно заключить объект вместе с частью фона в прямоугольник (grab). Сегментирование объекта произойдет автоматически (cut). 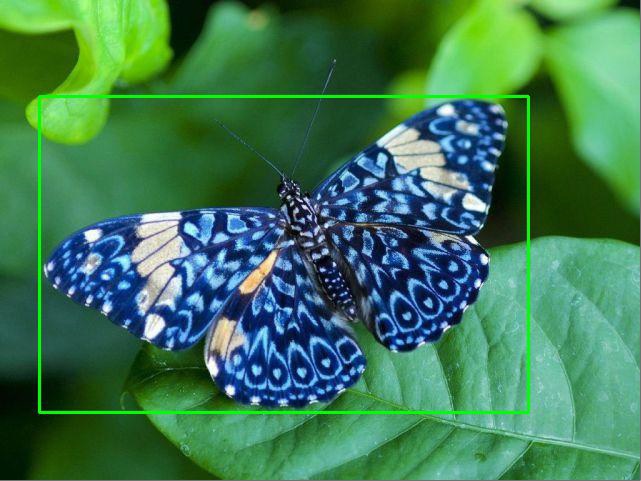 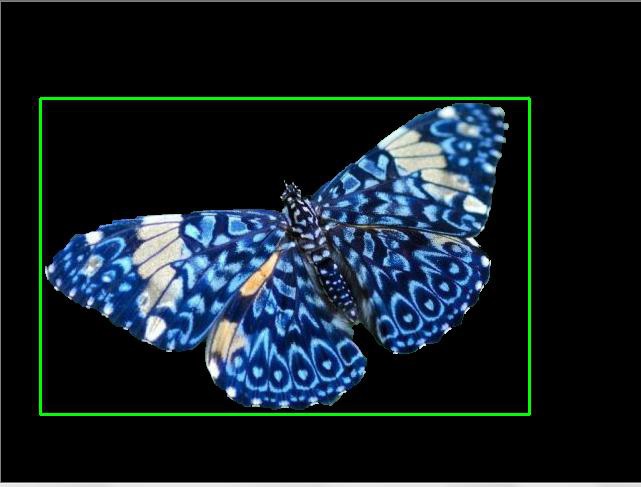 Могут возникнуть сложности при сегментации, если внутри ограничивающего прямоугольника присутствуют цвета, которые встречаются в большом количестве не только в объекте, но и на фоне. В этом случае можно поставить дополнительные метки объекта (красная линия) и фона (синяя линия).    Рассмотрим идею алгоритма. За основу взят алгоритм интерактивной сегментации GraphCut, где пользователю надо поставить маркеры на фон и на объект. Изображение рассматривается как массив Задача сегментации — найти неизвестные Причем минимум энергии соответствует наилучшей сегментации.  V (a, z) — слагаемое отвечает за связь между пикселями. Сумма идет по всем парам пикселей, которые являются соседями, dis(m,n) — евклидово расстояние. Найдя глобальный минимум функции энергии E, получим массив прозрачности Мы рассмотрели только небольшую часть существующих алгоритмов. В результате сегментации на изображении выделяются области, в которые объединяются пиксели по выбранным признакам. Для заливки однородных по цвету объектов подойдет FloodFill. С задачей отделения конкретного объекта от фона хорошо справится GrabCut. Если использовать реализацию MeanShift из OpenCV, то пиксели, близкие по цвету и координатам, будут кластеризованы. WaterShed подойдет для изображений с простой текстурой. Таким образом, алгоритм сегментации следует выбирать, конечно, исходя из конкретной задачи. 1.2 Многопороговая обработка изображений Классические методы сегментации основаны на использовании порога интенсивности. Многие изображения можно охарактеризовать тем, что они содержат некоторый интересующий нас объект достаточно однородной яркости на фоне другой яркости. Пороговое разделение является одним из основных методов, используемых в промышленных системах технического зрения для обнаружения объектов, особенно в случаях, когда требуется наличие высокой пропускной способности системы. Пороговая обработка является одним из основных методов сегментации изображений, благодаря интуитивно понятным свойствам. Этот метод ориентирован на обработку изображений, отдельные однородные области которых отличаются средней яркостью. Самым распространенным методом сегментации путем пороговой обработки является бинарная сегментация, то есть когда в нашем распоряжении имеется два типа однородных участков. Естественно сегментация может быть не только бинарной и в таком случае существующих классов больше, чем два. Такой вид сегментации называется многоуровневым. Результирующее изображение не является бинарным, но оно состоит из сегментов различной яркости. Существует множество методов, многие из них являются просто совокупностью других, но большинство из них, так или иначе, базируются на анализе гистограммы исходного изображения, однако есть и принципиально другие подходы, которые не затрагивают анализ гистограмм в прямом виде или переходят от них к анализу некоторых других функций. В случае конкретной задачи, модернизируя какой-либо алгоритм пороговой обработки, иногда можно достичь более хороших результатов, нежели в общем случае, так как в таком случае имеется дополнительная информация об «интересуемом» классе, но все равно, какая бы не была задача, в основе алгоритма решения лежит какой-то общий подход пороговой сегментации. Разнообразие и изменчивость форм и текстур объектов, а также интенсивный нестационарный фон определяют сложность обработки. Для областей объектов интереса обычно характерны небольшие отношения сигнал/фон. Кроме того, зарегистрированное цифровое изображение может иметь низкое качество, малое число уровней квантования, изменчивый характер и нечеткие границы структур объектов, например естественных и искусственных структур (рек, дорог, мостов, зданий). В таких системах случайный фон сильно отличается от гауссовского, плотности вероятности достаточно асимметричны, а их асимптотичекий вид характеризуется логнормальными или "загрязненными" нормальными (contaminated-normal) закономерностями. При ограниченной выборке однозначная идентификация таких плотностей затруднена. В современных системах дистанционного наблюдения часто интегрируются данные от различных источников в рамках специализированных ГИС, что обусловливает актуальность раннего перехода от исходного растрового к структурированному (объектному или признаковому) представлению изображений [2]. Рассматриваемый подход обобщает метод дальнейшего использования результатов многопороговой обработки изображений. В частности, все объекты, представляющие интерес, классифицируются на несколько категорий с использованием определенных объективных критериев. Типичные критерии классификации включают размер объекта или площадь поверхности, характеристики его формы, такие как периметр, ориентация, длина главной оси и т. д. [3]. Используя объектно-ориентированные параметры, оптимизация порогов теперь может выполняться не на уровне всего изображения (или его фрагмента, такого как окно), а на уровне объекта после того, как он выбран в серии из нескольких двоичных файлов. слои. Преимущество состоит в том, что для каждой выбранной категории объектов (или даже для каждого отдельного объекта) двоичный уровень, который лучше всего представляет его в соответствии с определенными критериями, может быть выбран индивидуально. В результате адаптивное пороговое значение уровня объекта в соответствии с набором простых объективных критериев может быть реализовано и легко автоматизировано. 1.3 Геометрические критерииЧтобы исключить зависимость от разрешения изображения, целесообразно выбрать определенные нормализованные геометрические критерии. Первый показанный здесь геометрический инвариант - это коэффициент удлинения периметра PS = P2 / 4πS, где P - периметр объекта, а S - площадь объекта. Это соотношение также называется метрикой уплотнения. Другим геометрическим инвариантом является коэффициент удлинения главной оси L: PL = πL2 / 4S. Нетрудно показать, что для простого круга оба вышеуказанных коэффициента равны единице. Основываясь на этих или аналогичных метриках, выбор компактных и расширенных объектов может быть выполнен простым использованием слоя, где соответствующий параметр достигает своего минимального значения, которое также близко к единице. При наличии аддитивного шума соответствующие коэффициенты PS и PL усиливаются, как показано на рис. 1. С увеличением порога T окружающая фрактальная структура удаляется из объекта за счет того, что некоторые внутренние пиксели внутри объекта также удаляются из-за влияния шума. Этот процесс сначала приводит к снижению PS в некоторой точке, достигающей Т = Topt
Рис. 1. Тестовое изображение (а) и результаты бинаризации: б - с порогом Оцу Т = 125; c - с высоким порогом T = 155 после выбора; д - с низким порогом Т = 125 после выбора. Шкала яркости показывает значение площади объекта
Рис. 2. Адаптивный выбор компактных объектов из необработанных изображений дистанционного наблюдения. Подобным образом, выбор продолжительных объектов может быть выполнен, когда PL используется в качестве параметра оптимизации вместо PS. Как и в предыдущем примере, после многопороговой обработки для каждого изолированного объекта вычисляется и присваивается его коэффициент PL. На рис.3 а показано необработанное изображение, а на рис. 3б показаны результаты выбора только продолжительных объектов. Для упрощения нормализации вместо значений ФЛ, которые демонстрируют неограниченное увеличение от оптимального значения Т, 1 / ФЛ, которые строго ограничены между 0 и 1, показаны градиентом интенсивности.
Рис. 3. Адаптивный выбор вытянутых объектов из необработанных снимков дистанционного наблюдения. Следствием выбора и удаления небольших объектов является возможность снижения порогового уровня при сохранении низкой вероятности ложной тревоги при обнаружении полезных объектов. Чем больше площадь удаляемых объектов шума, тем ниже может быть установлен порог обнаружения при той же вероятности ложной тревоги. Вероятность ложной тревоги зависит от минимальной площади Smin обнаруженных объектов (ось X), как показано на рис. 4 в логарифмическом масштабе. Кривые получены путем моделирования. Для заданного порогового значения и для каждой области Smin (которая расположена в пикселях вдоль горизонтальной оси) величина превышения шума была рассчитана и нормализована к размеру поля. Ось ординат представляет собой десятичный логарифм этого нормированного значения, который соответствует оценочной степени вероятности ложной тревоги. Этот анализ используется для задачи обнаружения, где объект обнаруживается путем установки порогового уровня TNP, удовлетворяющего критерию Неймана-Пирсона для каждого пикселя. 1.4 Существующие методы оценки качества сегментации изображенийКачество сегментации изображения может определяться статистическими, спектральными, яркостными характеристиками изображения. В большинстве практических применений качество рассматривается как мера близости двух изображений: реального и идеального или преобразованного и исходного. При таком подходе можно оценивать как субъективную степень похожести изображений, так и получать объективные оценки параметров сигналов изображения: моменты первого и второго порядка разностного сигнала сравниваемых изображений, такие параметры преобразования как отношение сигнал/шум, коэффициенты сжатия информации и другие. Для проведения сравнительного анализа методов сегментации используются критерии, основанные на вычислении меры отличия между результатом сегментации, полученным с помощью алгоритма, и сегментом, построенным экспертом на основе визуального анализа изображения. Присутствие эксперта обуславливает возможность влияния человеческого фактора на результат сравнительного анализа [1]. Ниже приведены критерии оценки качества сегментации: показатель чрезмерной сегментации:  показатель недостаточной сегментации:  общая ошибка сегментации: MA= FPR + FNR , где S1– результат сегментации, полученный с помощью одного из методов сегментации; S2– построенный экспертом сегмент; В результате сегментации возникают ошибки двух типов: на сегментированном изображении точка отмечена как контурная, а на идеальном контурном изображении она не относится к контуру; на сегментированном изображении точка не отмечена как контурная, но она является таковой на идеальном контурном изображении. Поэтому при оценке качества сегментации изображений выбрано два критерия: критерий, показывающий степень сходства сегментированного и идеального контурного изображений (FOM) и критерий, показывающий степень их отличия (RMS). Критерий FOM соответствует эмпирическому расстоянию между идеальным контурным изображением, представленным в виде контуров f и контурами, полученными в результате сегментации g:  , ,где Критерий RMS представляет собой среднеквадратичную ошибку, определяемую выражением:  где f(x), g(x) – интенсивность пикселей x в fi и gi, X – множество пикселей на сегментируемом изображении. Субъективные критерии – это критерии визуального восприятия, оцениваемые в процессе экспертизы некоторой группой наблюдателей (экспертов). Наибольшее распространение получил метод оценок, при котором наблюдатель оценивает качество изображения в баллах по определенной шкале, считая, что идеальное изображение имеет максимальный балл (табл.1). Таблица 1. Шкалы субъективных оценок качества изображения
Средняя оценка определяется по формуле:  где N – общее число оценок; ni – число оценок равных i баллам; r – количество видов разных оценок. Нормализованные оценки p выражают относительное качество в диапазоне [0;1]. При пятибалльной системе, когда g Основываясь на психофизических свойствах наблюдателя, субъективные оценки позволяют характеризовать восприятие изображения. Ухудшение обратно пропорционально нормализованной оценке качества и изменяется от ∞ до 0 при изменении p от 0 до 1 в соответствии с формулой: I=1/p –1. Интегральный критерий качества формируется по обобщенной формуле:  где M – число параметров, по которым оценивается качество изображения; v – показатель степени. Значение показателя степени принимают значения (1; 0,78; 2). Объективными критериями, используемыми при оценке качества изображений, являются критерии, позволяющие получить просто вычисляемую характеристику изображения разностного сигнала. К таким критериям относится, прежде всего, среднеквадратический критерий. По нему мерой различия двух изображений f(x,y) и fпр(x,y) является среднеквадратическое значение разностного сигнала двух изображений. Для непрерывных изображений, заданных при x  В некоторых случаях используется критерий максимальной ошибки, который позволяет установить значение максимальной ошибки преобразования: Управление информацией в автоматизированных производственных системах связано с решением задач развивающихся моделей предметной области деятельности и нацелено на накопление и организацию обмена информационных ресурсов, а также выработку новых критериев оценкикачества алгоритмовсегментации изображений [12]. 1.5 Существующие завки на патенты и изобретения включающие алгоритмы близкие к теме диссертации 2 Основная часть2.1 Цели и задачиЦель работы: проанализировать проблему выделения объектов дистанционного зондирования различной формы с адаптивной настройкой порога по результатам выбора. Также реализовать и испытать алгоритмы оценки сегментации объектов, основанный на инвариантных по масштабу геометрических критериях, таких как коэффициент удлинения периметра объекта и др. Изображение для наблюдателя часто представлено в виде некоторых однородных участков, отличающихся друг от друга различными характеристиками. Количество таких типов (или же классов) обычно невелико. Все изображение можно разбить на некоторое количество непересекающихся областей, каждая из которых является изображением одного из типов (классов). При анализе таких изображений целью любой системы является определение этих областей и указания их номера типа. Обработка изображения, позволяющая получить такую совокупность сведений о нем, и называется сегментацией [1]. Иными словами, предполагается, что области изображения соответствуют реальным объектам или же их частям. Характеристики помогают различать компактные и вытянутые объекты, оставаясь неизменными относительно масштаба изображения. Объектам интереса, как правило, присуща бóльшая компактность. Для грубой оценки качества метода в конкретной задаче обычно фиксируют несколько свойств, которыми должна обладать хорошая сегментация. Качество работы метода оценивается в зависимости от того, насколько полученная сегментация обладает этими свойствами. Наиболее часто используются следующие свойства [1]: однородность регионов (однородность цвета или текстуры) непохожесть соседних регионов гладкость границы региона маленькое количество мелких «дырок» внутри региона и т. д. Разные методы сегментации ориентированы на разные свойства разбиения. Поэтому при выборе метода сегментации для решения конкретной задачи, следует определиться, какие свойства разбиения действительно важны. В некоторых прикладных задачах достаточно того, чтобы разбиение обладало лишь первыми двумя из перечисленных свойств. Более общий подход к оценке качества работы метода, не учитывающий конкретного приложения, состоит в тестировании методов на общей базе изображений, для которых известна «правильная» сегментация. Например, Berkeley Segmentation Dataset (http://www.eecs.berkeley.edu/Research/Projects/CS/vision/grouping/segbench), насчитывает более 1000 изображений, отсегментированных вручную 30 разными людьми. В [18] приводится описание базы изображений и предлагается численная мера соответствия полученной сегментации «правильной». 2.2 Моделируемые задачи2.3 Тестируемый алгоритм2.4 Результаты работыЗАКЛЮЧЕНИЕ ПРИЛОЖЕНИЕ АЛистинг файла main clear all close all clc; global Vt; global Vm; global D0; global eps; global Ts; global Pm_curr; Vt = 800;%Target velocity Vm = 1500;%Missile velocity D0 = 5000;%Given distance eps = pi/180;%1 deg (deflexion) Ts = 0.001;%Step = 1 ms Pm_curr.x = 0;%Current missile coordinates Pm_curr.y = 0;%Missile start Tw = 10;%Watching time Rl = 10;%lesion Radius %abs(rad2deg(atan((k2-k1)/(1+k2*k1)))) figure(1) t = 0; i = 1;%Iterator N = Tw/Ts; Xm = zeros(N,1); Ym = zeros(N,1); Xt = zeros(N,1); Yt = zeros(N,1); Pm.x = 0; Pm.y = 0; Pt.y = D0; while 1 if Pm.y Pt = target(t);%Target position Pm = missile(Pt); %[k1,b1] = pLine(Pm_curr, Pt);%Visir line Xm(i) = Pm.x; Ym(i) = Pm.y; Xt(i) = Pt.x; Yt(i) = D0; elseif Pm.x Pt = target(t);%Target position Pm = missile(Pm,t); Xm(i) = Pm.x; Ym(i) = Pm.y; Xt(i) = Pt.x; Yt(i) = D0; else break; end Pm_curr = Pm; t = t + Ts; i = i + 1; end Xm(i:N) = []; Ym(i:N) = []; Xt(i:N) = []; Yt(i:N) = []; plot(Xm,Ym); hold on plot(Xt,Yt,'r-'); hold on plot(Xm(i-1),Ym(i-1),'r*'); ylim([0 10000]) hold off legend('Missile trajectory','Target trajectory'); grid on Ts*(i-1)%Time of battle  БИБЛИОГРАФИЯ 1. Гонсалес Р., Вудс Р. Цифровая обработка изображений.// Пер. с англ.- Москва.- Техносфера. – 2006, -1072 с. 2. Волков В. Ю., Маркелов О. А., Богачев М. И. Сегментация изображений и селекция объектов на основе многопороговой обработки // Изв. вузов России. Радиоэлектроника. 2019. Т. 22, № 3. С. 24–35. doi: 10.32603/1993-8985-2019-22-3-24-35 3. M. Bogachev, V. Volkov, G. Kolaev, L. Chernova, I. Vishnyakov, A. Kayumov, “Selection and Quantification of Objects in Microscopic Images: from Multi-Criteria to Multi-Threshold Analysis,” Bionanoscience, vol. pp. 1-7, 2018. Web: https://doi.org/10.1007/s12668-018-0588-2 4. S. Arora, J. Acharya, A. Verma, P.K. Panigrahi, “Multilevel thresholding for image segmentation through a fast statistical recursive algorithm,” Pattern Recognition Letters, vol. 29, pp. 119-125, 2008. 5. J. Yang, Y. Yang, W. Yu, J. Feng, “Multi-threshold Image Segmentation based on K-means and Firefly Algorithm,” Proc. ICMT-13, 2013. 6. P. Priyanka, K. Vasudevarao, Y. Sunitha, Dr.B. Sridhar, “A Multi Level Fuzzy Threshold Image Segmentation Method for Industrial Applications,” IOSR Journal of Electronics and Communication Engineering (IOSR-JECE), vol. 12, Issue 2, ver. III, pp. 06-17, Mar.-Apr. 2017. 7. O. Banimelhem, Y. Yahya,”Multi-thresholding image segmentation using genetic algorithm,” Proc. IPCV, 2012. 8. E. Cuevas, A. González, F. Fausto, D. Zaldívar, M. Pérez-Cisneros, “Multithreshold Segmentation by Using an Algorithm Based on the Behavior of Locust Swarms,” Hindawi Publishing Corporation. Mathematical Problems in Engineering, vol. 2015, article ID 805357, 25 p. 9. D. Comaniciu, P. Meer Mean shift analysis and applications, IEEE International Conference on Computer Vision, 1999, vol. 2, pp. 1197. 10. D. Comaniciu, V. Ramesh, P. Meer Real-Time Tracking of Non-Rigid Objects Using Mean Shift, Conference on CVPR, 2000, vol. 2, pp. 1-8. 11. С. Rother, V. Kolmogorov, A. Blake Grabcut — interactive foreground extraction using iterated graph cuts, 2004 12. Колдаев В.Д. Основы логического проектирования: учебное пособие [Текст] / В.Д. Колдаев. – М.: ИД «ФОРУМ» – ИНФРА-М, 2011. – 448 с. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||