Задача апп. Задача. Порядок выполнения работы. Пример
 Скачать 0.71 Mb. Скачать 0.71 Mb.
|

Порядок выполнения работы. ПримерЗаданы условия задачи: дана структурная схема манипулятора ПР (рисунок 7). 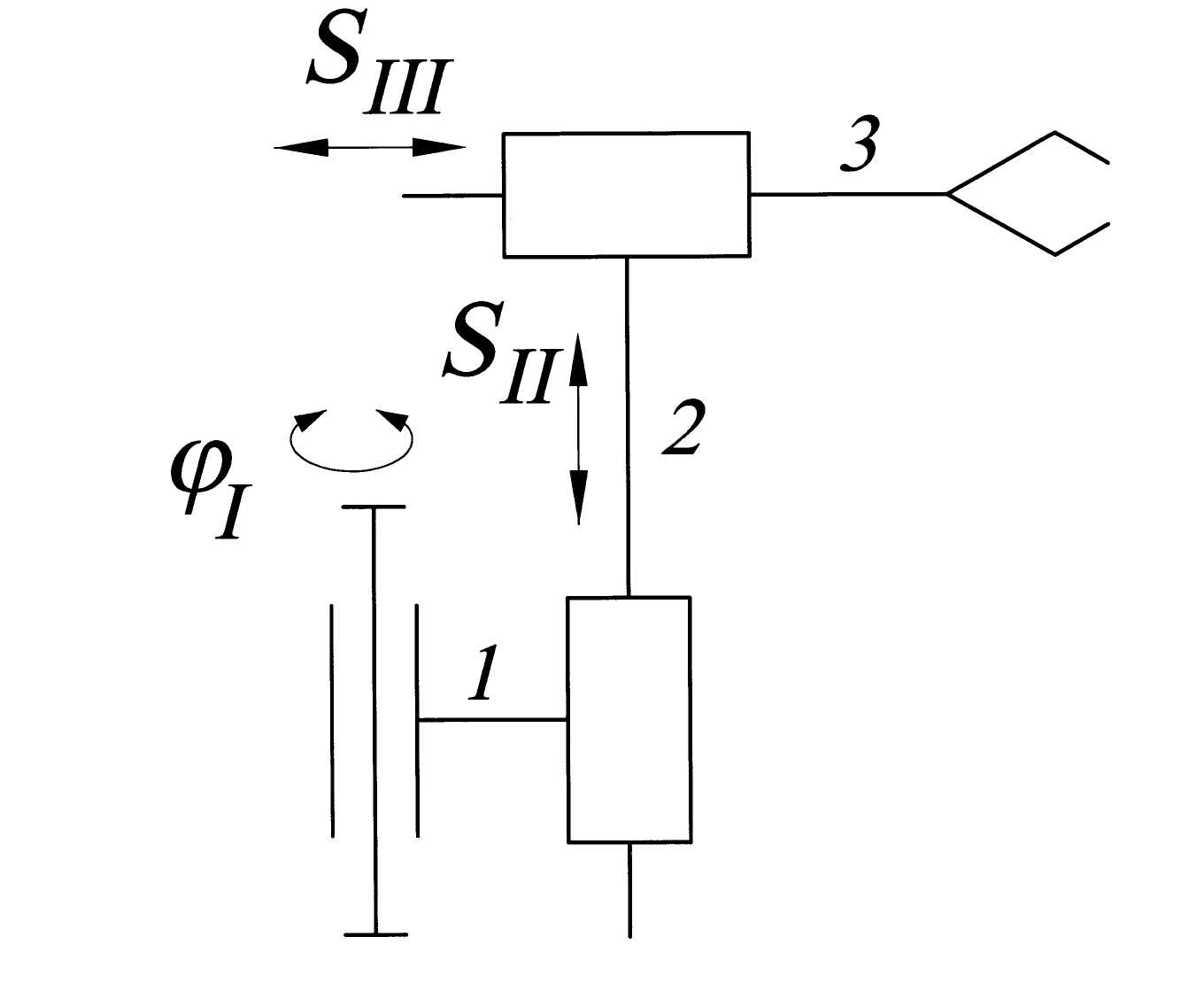 Рисунок 7 – Структурная схема манипулятора Для данной структурной схемы манипулятора: пронумеровать звенья, указать виды перемещений и классы кинематических пар; определить число степеней подвижности назначить размеры звеньев и задать диапазоны перемещений по степеням подвижности; на основе кинематической схемы изобразить конструктивную кинематическую схему; определить тип системы координат относительно стойки, связанной неподвижным основанием; определить форму и размеры рабочей зоны; рассчитать объём рабочей зоны и показатель мобильности робота; определить суммарную погрешность позиционирования и погрешности по степеням подвижности робота; изобразить конструктивную схему манипулятора. Этапы: 1 Определяем виды звеньев и классы кинематических пар (таблица 3) Таблица 3 – Виды звеньев, классы кинематических пар
Число степеней подвижности 2 По формуле Сомова-Малышева определяем число степеней подвижности где 3 Размеры звеньев Габаритные размеры манипулятора представлены на кинематической схеме (рисунок 8). Высота H=700 мм. Длина L=1100 мм. 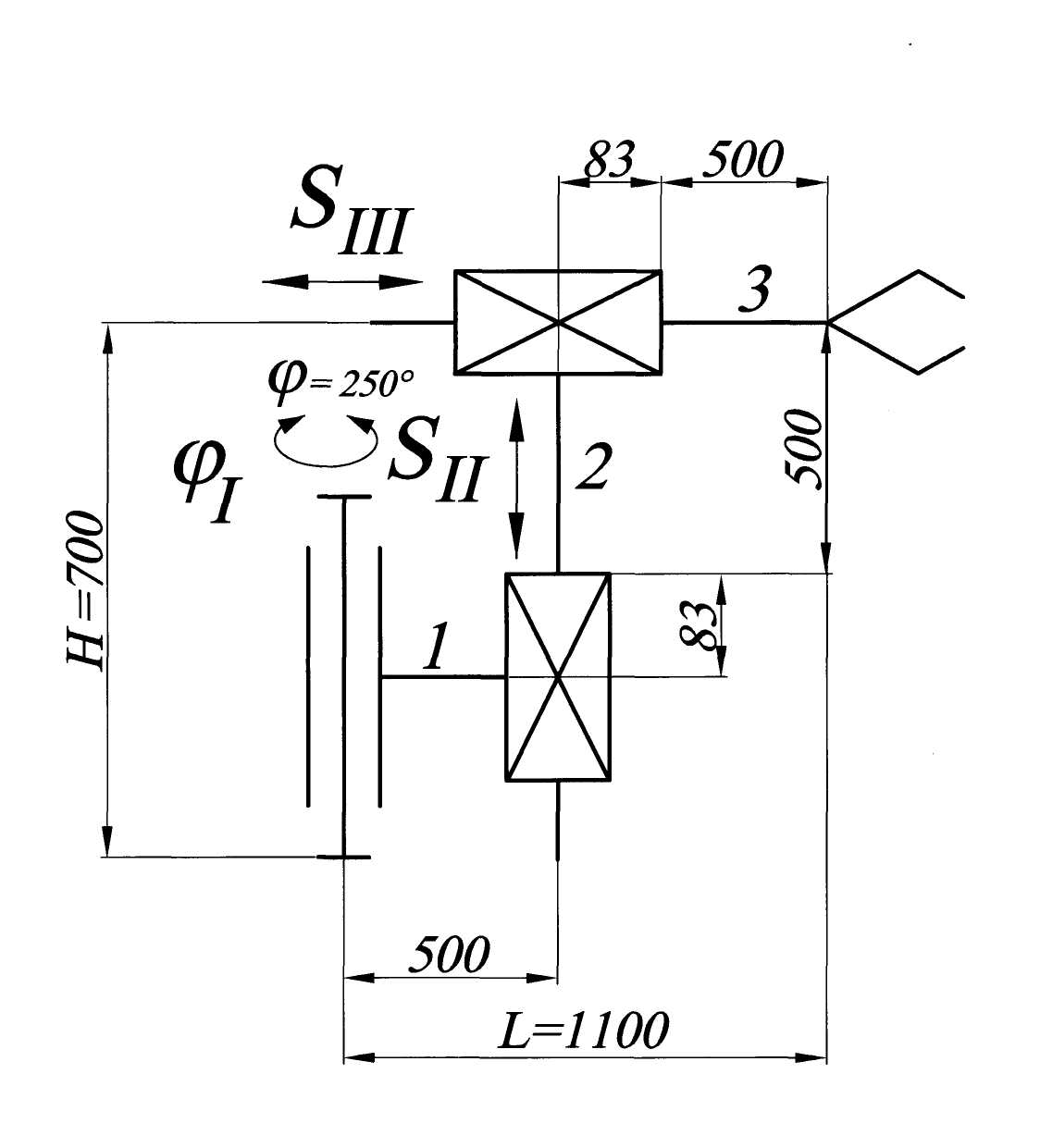 Рисунок 8 – Кинематическая схема манипулятора 4 Диапазоны перемещений по степеням подвижности. Вращательное вокруг оси fI = 2500. Возвратно-поступательное S II = 500мм. Возвратно-поступательное S III = 583мм. 5 Объём рабочей зоны (V)  Рисунок 9 – Рабочая зона манипулятора 6 Тип системы координат Основываясь на виде рабочей зоны, можно сделать вывод, что система координат, в которой функционирует данный манипулятор является цилиндрической.. 8 Погрешности позиционирования по степеням подвижности (d)
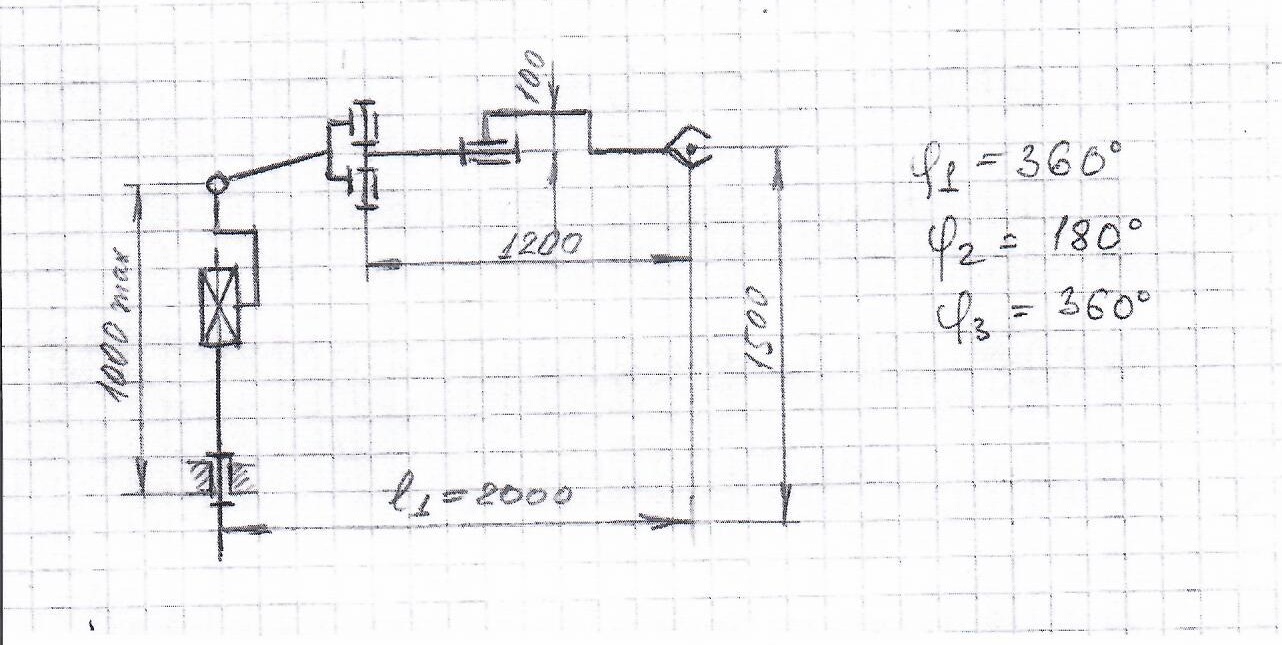
1 Суммарная допустимая погрешность по оси ОХ для заготовки d=5мм:  Рисунок 10 2 Значения в направлении ОХ складываются из погрешностей степеней подвижности: - fI - 3 Уравнение погрешностей: 4 Погрешность линейного перемещения:  ; ;5 Значения переводных коэффициентов:  . .6 Учитывая, что 7 Допустимые погрешности звеньев:  В итоге получаем суммарную погрешность:  Рисунок 11 – Конструктивная кинематическая схема манипулятора Литература1 Справочник по промышленной робототехнике: в 2-х кН.. Кн. 1 / Под ред. Ш. Нофа; Пер. с англ. Д. Ф. Миронова и др. – Машиностроение, 1989. – 480 с. 2 Механика промышленных роботов. Учебное пособие для втузов: в 3-х кн. /Под ред. К. В. Фролова, Е. И. Воробьева. Кн. 3: Основы конструирования / Е. И. Воробьёв, А. В. Бабич, К. П. Жуков и др. – М.: Высшая шк., 1989. – 38 с. 3 ГОСТ 2.701-84 ЕСКД Схемы. Виды и типы. Общие требования к выполнению. Задача для выполнения (сделать по образцу)Условие: |