Пояснительная записка на 48 страницах 2 Графическая часть на 12 листах Руководитель к т. н., доц. Рыжков В. Г
 Скачать 2.09 Mb. Скачать 2.09 Mb.
|

3.4 Основные параметры объекта регулированияЭквивалентная индуктивность  цепи выпрямления цепи выпрямления (3.4.1) (3.4.1)где  индуктивность якорной обмотки двигателя индуктивность якорной обмотки двигателя , (3.4.2) , (3.4.2) (3.4.3) (3.4.3) , (3.4.4) , (3.4.4)где  - эмпирический коэффициент для компенсированных машин; - эмпирический коэффициент для компенсированных машин; индуктивность фазы токоограничивающего реактора индуктивность фазы токоограничивающего реактораЗначит:  . (3.4.5) . (3.4.5)Эквивалентная электромагнитная постоянная времени якорной цепи:  . (3.4.6) . (3.4.6)Суммарный момент инерции электропривода, приведённый к валу двигателя:  . .Электромеханическая постоянная времени электропривода:  . (3.4.7) . (3.4.7)Постоянная времени якоря:  (3.4.8) (3.4.8)Некомпенсированная постоянная времени ЭП:  . (3.4.9) . (3.4.9)Передаточное число измерительного редуктора  , (3.4.10) , (3.4.10)где  рад/с; рад/с;Коп – коэффициент обратной связи по перемещению принимается равным 10 В/рад; Uзпmax = 10 В – максимальное напряжение задание на перемещение; ε – угловое ускорение двигателя, определяется из расчета величины динамического тока равной IН:  (3.4.11) (3.4.11)Коэффициент обратной связи по якорному току:  (3.4.12) (3.4.12)Для осуществления отрицательной обратной связи по скорости по справочным данным в соответствии с номинальной скоростью двигателя (320 об/мин) выбирается инкрементальный энкодер HOG 10, со следующими техническими данными (Таблица 3.5) Таблица 3.5 - Технические данные инкрементального энкодера G0355
Стандартный инкрементальный энкодер с нормальным валом. Исполнение GI 355 (GI355) имеет зажимной фланец. Энкодер обладает высокой устойчивостью к внешним механическим воздействиям. Корпус изготовлен из алюминия, аналогичное по электрическим характеристикам исполнение из нержавеющей стали имеет название GЕ355, а исполнение по стандарту ATEX для взрывоопасных помещений называется Х700. Выходные каналы A,B,N (нулевой импульс), прямые и инвертированные. Выход реализован по двухтактной симметричной схеме или RS422. Для гальванической развязки цепей тахогенератора и цепей управления используется датчик напряжения. Коэффициент усиления датчика напряжения примем равным единице: Кдн = 1. Коэффициент обратной связи по скорости  (3.4.15) (3.4.15)Для того, чтобы выбрать сопротивления делителя напряжения, включаемуюв цепь энкодера, необходимо, предварительно рассчитать напряжение на зажимах тахогенератора соответствующее частоте вращения вала двигателя  . . (3.4.16) (3.4.16)где  - конструктивный коэффициент принимаемый постоянным в случаи независимого возбуждения. - конструктивный коэффициент принимаемый постоянным в случаи независимого возбуждения. (3.4.17) (3.4.17) (3.4.18) (3.4.18) (3.4.19) (3.4.19)Принципиальная схема электрической части показана на рис. 3.1. 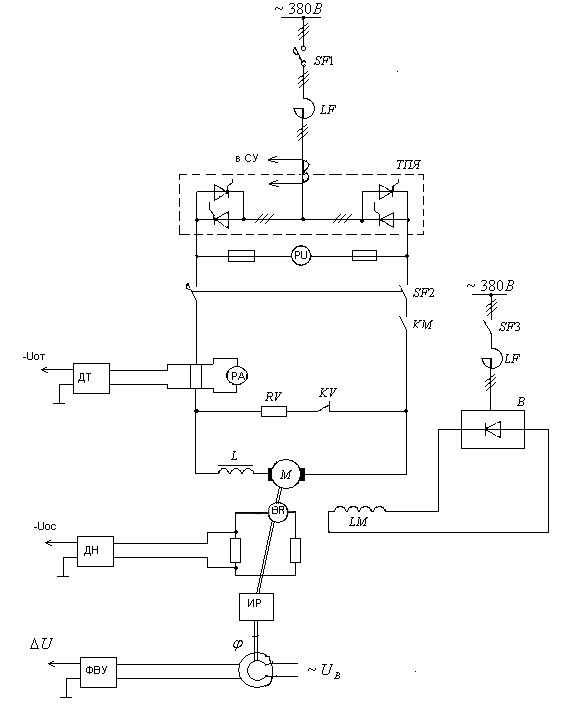 Рисунок 3.1 – Упрощенная принципиальная схема реверсивного тиристорного преобразователя 4 ПОСТРОЕНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ |