Механика 3. Задание 1. Практическое задание 1 Тема Структура механизмов
 Скачать 54.14 Kb. Скачать 54.14 Kb.
|

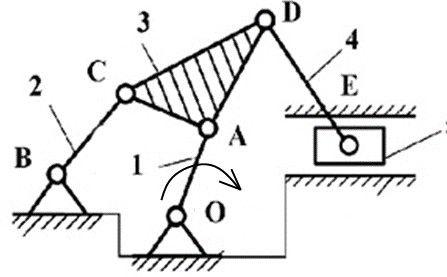
Практическое задание 1 Тема 1. Структура механизмовЗадание Рассмотреть кинематическую схему многозвенного механизма, определить число звеньев и кинематических пар, дать характеристику кинематическим парам и определить степень подвижности механизма. Разложить механизм на группы Ассура и записать формулу образования механизма. Вычертить структурную схему механизма. Ведущее звено указать стрелкой. Пронумеровать звенья арабскими цифрами в порядке их присоединения к ведущему звену. Кинематические пары обозначить буквами латинского алфавита А, В, С и т. д., а неподвижные пары – буквами O1, О2, О3 и т. д. При наличии в основном механизме кинематических пар 4-го класса произвести их замену кинематической цепью с парами 5-го класса и определить степень свободы заменяющего механизма по формуле П.Л. Чебышева. Варианты заданий представлены в Приложении 1. Рекомендации по выполнению заданияИспользуя представленную методику, необходимо сделать структурный анализ схемы двигателя с прицепным шатуном. При выполнении задания студент должен (см. Бланк выполнения задания): Ознакомиться с представленным на кинематической схеме механизмом. Определить его функциональное назначение и, соответственно, определить входное и выходное звенья. Назвать звенья по характеру движения и записать их в виде спецификации рядом с кинематической схемой (таблица 1.1). Характеристику кинематических пар записать в таблицу 1.2. Определить число степеней свободы механизма. Разложить механизм на группы Ассура и результаты занести в таблицу 1.3. Записать структурную формулу образования механизма. Бланк выполнения заданияИспользуя представленную методику, необходимо сделать структурный анализ схемы двигателя с прицепным шатуном. При выполнении задания следует: Ознакомиться с представленным на кинематической схеме механизмом. Определить его функциональное назначение и, соответственно, определить входное и выходное звенья. Назвать звенья по характеру движения и записать их в виде спецификации рядом с кинематической схемой (таблица 1.1). Характеристику кинематических пар записать в таблицу 1.2. Определить число степеней свободы механизма. Разложить механизм на группы Ассура и результаты занести в таблицу 1.2. Записать структурную формулу образования механизма. В механизме станка, общее количество звеньев k= 6, а число подвижных звеньев n = 5. Дадим названия звеньям по характеру их движения Таблица 1.1 – Обозначение звеньев механизма
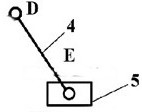
Входным звеном является кривошип 1, совершающий вращательное движение, выходным звеном – ползун 5, совершающий поступательное движение. Характеристику кинематических пар приведем в таблице 1.2. Таблица 1.2 – Характеристика кинематических пар
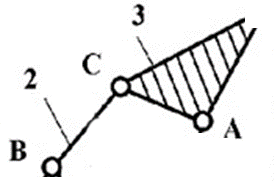
Число степеней свободы плоского механизма, то есть число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по формуле Чебышева: , где n= 5 – число подвижных звеньев механизма; p5 = 7 – количество одноподвижных кинематических пар 5 класса; p4 = 0 – количество двухподвижных кинематических пар 4 класса. Разложим механизм на группы Ассура и определим их класс и порядок. Характеристику групп Ассура и начального звена приведем в таблице 1.3.
Структурная формула образования механизма: Тогда структурная формула образования механизма будет записана так: , механизм II класса. Класс механизму присваивается по наивысшему классу группы Ассура. |