практи. практические работы по тоат-1. Практикум по дисциплине Теоретические основы автоматики и телемеханики для студентов специальности 23. 05. 05 Системы обеспечения движения поездов
 Скачать 1.13 Mb. Скачать 1.13 Mb.
|

|
Таблица 2
Построить график L = f(δв) Задача №2. Определить параметры обмотки индуктивного датчика. Пояснения к работе  2.2 Пример расчета Исходные данные: Sм = 200 мм2 = 2*10-4 м2 , δв = 2 мм = 2*10-2 м, I = 10 мA = 0,01 А, Δдоп = 3 А/мм, U = 220 B, f = 400 Гц  3. Задание: 3.1 Определить параметры обмотки датчика. Исходные данные для расчета взять из таблицы 1, согласно варианту. Таблица 1
3.2. Произвести расчет W = L = 3.3 Результаты расчета свести в таблицу 2 Таблица 2
4. Контрольные вопросы к практической работе №2 1. Какие типы индуктивных датчиков существуют? 2. Объясните цепь преобразований в индуктивном датчике. 3. Укажите достоинства и недостатки индуктивных датчиков. Список литературы 1. Келим Ю.М. Типовые элементы систем автоматического управления. -М,: «Форум - Инфра - М», 2002 г., -383с. Практическая работа № 3. Определение основных параметров емкостного датчика. 1 Цель работы. Научиться рассчитывать параметры емкостного датчика. Задание. Рассчитать основные параметры емкостного датчика угловых перемещений 2. Пояснения к работе 2.1. Краткие теоретические сведения. Емкостной датчик угловых перемещений имеет вид:   2.2 Пример расчета Исходные данные: Smax=15см 2; Сmaх=400; d=0,8; ег=1.;  3. Задание: 3.1 Определить основные параметры емкостного датчика. Исходные данные для расчета взять из таблицы 1. Таблица 1
3.2 Произвести расчет n=________________________________________________________ __________________________________________________ Sд=________________________________________________________ 3.3 Результаты расчета свести в таблицу 2. Таблица 2
4. Контрольные вопросы к практической работе №3 1. Как определить чувствительность емкостного датчика, зная его емкость? 5. Какие виды емкостных датчиков существуют? Список литературы 1. Келим Ю.М. Типовые элементы систем автоматического управления. -М,: «Форум - Инфра - М», 2002 г., -383с. Практическая работа № 4. Конструкция реле систем железнодорожной автоматики и телемеханики, виды контактов. Цель работы. Изучить конструкцию реле ж.д. автоматики, виды контактов электромагнитных реле, научиться изображать колодку с обозначением контактов реле. 2 . Пояснения к работе. Реле – это устройство, которое автоматически осуществляет скачкообразное переключение выходного сигнала под воздействием управляющего сигнала, изменяющегося непрерывно в определенных пределах. Электромагнитные реле по роду используемого тока делятся на реле постоянного и переменного тока. Реле постоянного тока делятся на нейтральные и поляризованные. Малогабаритные реле относятся к реле I класса надежности и изготовляются двух видов: 1) штепсельные (в колпаке) для установки на стативах и в релейных шкафах и 2) нештепсельные (открытые) для установки в релейных блоках. По электрическим и механическим характеристикам реле штепсельного типа (НМШ, НМШМ, КМШ и т. д.) и соответственно реле нештепсельного типа (НМ, МММ, КМ и т. д.) аналогичны.  Рис. 1. Основными деталями реле являются: электромагнит, состоящий из обмотки 1 и сердечника 2; ярмо 3; подвижная часть (якорь клапанного типа) 4; возвратная пружина (плоская) 5; контактные пружины 6 – 8 (контактная система); контактный поводок 9 и штифт отлипания 10. Нештепсельные реле для присоединения (подпайки) монтажных проводов в контактных пружинах и выводах от обмоток имеют отверстия. Номенклатура реле состоит из букв, обозначающих конструктивный тип реле и временные его характеристики, и цифр, показывающих число контактных групп и сопротивление катушек. Цифры 1, 2, 3, 4, следующие за буквенным обозначением реле, условно обозначают контактную систему реле: — наличие восьми контактных групп (тройников) на переключение (8 фт); — четырех контактных групп (4 фт); — двух контактных групп (2 фт) и двух фронтовых контактов (2ф); — четырех контактных групп (4 фт) и четырех фронтовых контактов (4 ф). По роду управляющего тока малогабаритные реле разделяются на реле постоянного и переменного токов. Малогабаритные реле постоянного тока изготовляют следующих типов: НМШ — нейтральные малогабаритные штепсельные нормальнодействующие; НМШМ — нейтральные малогабаритные штепсельные медленнодействующие на отпускание; АНШ — нейтральные малогабаритные штепсельные с повышенной чувствительностью на срабатывание; НМПШ — нейтральные малогабаритные пусковые, штепсельные; КМШ — комбинированные малогабаритные штепсельные; ПМПШ — поляризованные малогабаритные пусковые штепсельные, —ИМШ — импульсные малогабаритные штепсельные. Малогабаритные реле переменного тока изготовляют следующих типов: НМВШ — нейтральные малогабаритные штепсельные с выпрямителем; АНВШ — нейтральные малогабаритные с выпрямителем штепсельные, с повышенной чувствительностью на срабатывание; ОМШ, АОШ — огневые малогабаритные штепсельные; —АШ, АСШ, АПШ — аварийные малогабаритные штепсельные. Штепсельные розетки в комплект реле не входят и заказываются отдельно. 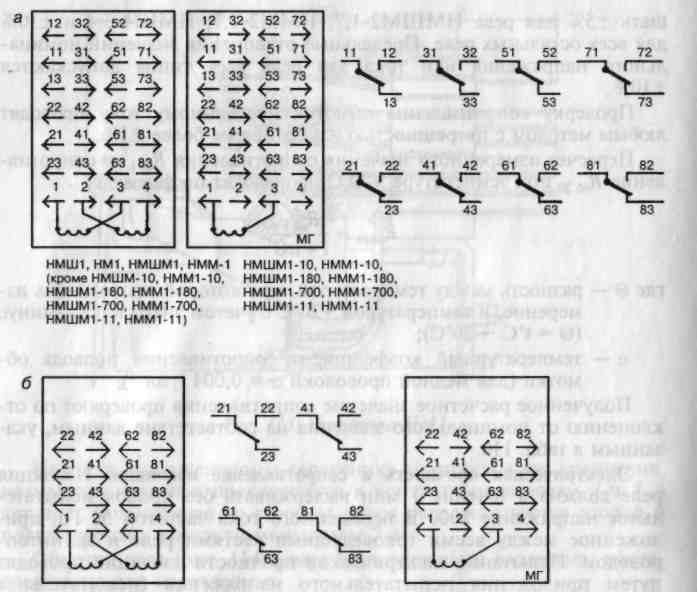 Рис. 1. Расположение контактов и схема соединения обмоток реле (вид с монтажной стороны) представлен на рис. 1 а и б. Обмотки реле могут быть включены раздельно, последовательно или параллельно. Обмотки нормальнодействующих реле РЭЛ1 намотаны на пластмассовые шпули, а медленнодействующих РЭЛ1М – на медные.  Рис. 2 Задание. Изобразить колодку нейтрального электромагнитного реле с обозначением контактов. Варианты заданий для составления кинематической схемы приведены реле в таблице 1. Таблица 1
4. Контрольные вопросы к практической работе №4 Контакты электромагнитных реле. Виды и конструкции контактов. Режимы работы контактов реле. Способы увеличения срока службы контактов. Способы искрогашения. Из чего состоит номенклатура реле? Рассказать о расположении контактов и схеме соединения обмоток реле с монтажной стороны. Список литературы В.В.Сапожников, Ю.А. Кравцов, Вл.В. Сапожников. Теоретические основы железнодорожной автоматики и телемеханики: Учебник.- М.: Федеральное агентство железнодорожного транспорта., 2008.- 320 с. Сапожников В.В, Кравцов Ю.А., Сапожников Вл.В. Теория дискретных устройств железнодорожной автоматики, телемеханики и связи: учебник.- М.: УМК МПС России, 2001. Сороко В.И. Реле железнодорожной автоматики и телемеханики [Текст]. – М.: НПФ «ПЛАНЕТА», 2002. – 696 с. Практическая работа № 5. Основные параметры реле 1. Цель работы 1.1. Научиться рассчитывать параметры электромагнитного реле. Задача №1. Рассчитать параметры электромагнитного реле. 2 Пояснения к работе. 2.1 Краткие теоретические сведения: Рассмотрим основные параметры, характеризующие работу, нейтрального электромагнитного реле постоянного тока.   3. Задание. Рассчитать параметры электромагнитного реле. Исходные данные для расчета взять в таблице 1, согласно варианту. Таблица 1
3.2 Произвести расчет: Sδ=___________________________________________________________ __________________________________________________________ Фδ=___________________________________________________________ _________________________________________________________ Вδ=___________________________________________________________ __________________________________________________________ I*ωδ=_______________________________________________________ ____________________________________________________________ 3.3 Результаты расчета свести в таблицу 2. |