Курсовая эл привода. Документ Microsoft Word. Представлены в таблице 1
 Скачать 259.03 Kb. Скачать 259.03 Kb.
|

Требования к системам электроприводов экскаваторов-мехлопатТребование, которое предъявляется к рабочим механизмам – приводной двигатель при рабочих нагрузках должен обеспечивать максимальную частоту вращения, которая, в свою очередь, обязана уменьшаться при больших нагруз- ках, вплоть до нуля (при встрече ковша с непреодолимым препятствием). Вра- щающий момент такого двигателя не должен превышать безопасной величины – стопорного момента. Этот процесс показан на графике механической харак- теристики n = f(M), показанной на рисунке 1.4. Данная зависимость состоит из рабочего участка ab, который практически параллелен горизонтальной оси, и нерабочего наклонного (падающего) участка bc. 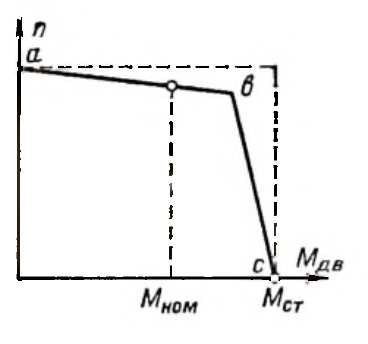 Рисунок 1.4 – Механическая характеристика привода экскаватора Каждый главный рабочий механизм: подъёма, поворота, напора и хода оборудуется двигателем постоянного тока Д независимого возбуждения, пита- ющегося от отдельного генератора Г, напряжение которого может плавно регу- лироваться от 0 до полного значения (+ Uг или – Uг) при помощи задающего устройства (командного контролера КК и силового магнитного усилителя СМУ), включенного в цепь возбуждения генератора [6]. Такая система регули- рования называется система с отдельным генератором или система генератор – двигатель (Г – Д). Обмотка якоря двигателя Д рабочего механизма соединена с обмоткой якоря Г напрямую без каких-либо выключателей и реостатов. Автоматически изменяя величину и направление магнитного потока воз- буждения генератора, можно изменять напряжение генератора, а значит частоту и направление вращения двигателя и рабочего механизма. 3-4. Расчет нагрузки и выбор двигателя механизма подъема. В исследовании оптимизации рабочего процесса будут сравниваться дви- гатели постоянного тока (ДПТ) с асинхронными двигателями (АД) главных приводов. Характеристики ДПТ главных рабочих приводов приведены в таблице 4.1. Таблица 4.1 – Характеристики ДПТ главных рабочих приводов
Сравнивая рабочие диаграммы синхронного двигателя с асинхронным двигателем, представленные на рисунке 4.3 и 4.4, можно сделать вывод о том, что для правильной и успешной работы механизмов экскаватора ЭКГ-8И по- дойдут оба типа электрических двигателей. 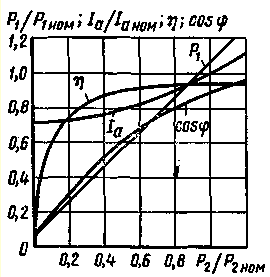 Рисунок 4.3 – Рабочая диаграмма синхронного двигателя 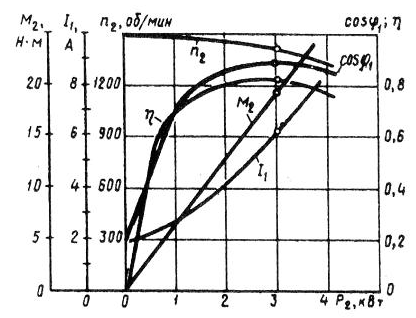 Рисунок 4.4 – Рабочая диаграмма асинхронного двигателя Исходя из того, что оба ЭД могут быть использованы в работе механиз- мов экскаватора, делается выбор в сторону асинхронного двигателя, т.к. в син- хронном двигателе существуют некоторые недостатки: Сложность конструкции; Сравнительная сложность пуска; Трудность регулирования частоты вращения; Регулярное техническое обслуживание. Для замены двигателей постоянного тока на асинхронные двигатели в главных рабочих механизмах, необходимо определить требуемую мощность каждого электродвигателя для каждого типа механизма (подъём/опускание ковша, поворот башни, напор стрелы). По формуле (4.1) определим мощность двигателя для каждого механизма [25]: РНОМ mP g |


