Презентация на тему Структурный анализ рычажных механизмов 25. 04. 2022
 Скачать 392.93 Kb. Скачать 392.93 Kb.
|

|
1 tpu.ru Презентация на тему Структурный анализ рычажных механизмов   25.04.2022 25.04.2022Ишдорж Ганзориг , гр.5Б04 2 |
| Класс пары | Число условий связи | Число степеней свободы | Название пары | Рисунок | Условное обозначение |
| I | 1 | 5 | Шар – плоскость | | |
| II | 2 | 4 | Шар – цилиндр | ||
| III | 3 | 3 | Сферическая | ||
| III | 3 | 3 | Плоскостная | ||
| IV | 4 | 2 | Цилиндрическая | ||
| IV | 4 | 2 | Сферическая с пальцем | ||
| V | 5 | 1 | Поступательная | ||
| V | 5 | 1 | Вращательная | ||
| V | 5 | 1 | Винтовая | | |
6

 Если условий связи в кинематической паре наложено S, то оставшееся независимое число степеней свободы Hбудет находиться по формуле:
Если условий связи в кинематической паре наложено S, то оставшееся независимое число степеней свободы Hбудет находиться по формуле:Кинематические цепи (КЦ)
Кинематическаяцепь– система звеньев, связанных между собой кинематическими парами.
Если в КЦ всего nзвеньев, p5пар 5-го класса, p4- 4-го, p3- 3-го и т.д., то число степеней свободы HКЦ будет:
Подвижность КЦ относительно неподвижного звена называется степеньюподвижностии находится по формуле:
Структурная формула КЦ общего вида
Любой механизм может быть составлен последовательным присоединением к ведущему звену (звеньям) кинематических цепей с нулевой степенью подвижности(группАссура).
Простейшая плоская группа Ассура представляет из себя кинематическую цепь, состоящую из двух звеньев и трёх кинематических пар V класса или из одного звена и кинематических пар IV-го и V-го классов.
| Вид | Схема |
| ВВВ | |
| ВВП | |
| ВПВ | |
| ВПП | |
| ПВП |
 Порядок группы Ассура определяется количеством поводков со свободными кинематическими парами, которыми группа присоединяется к ведущим звеньям и стойке или к звеньям предшествующих групп.
Порядок группы Ассура определяется количеством поводков со свободными кинематическими парами, которыми группа присоединяется к ведущим звеньям и стойке или к звеньям предшествующих групп. В представленной таблице все группы Ассура –второго порядка.
ППП– не является группой Ассура – это трёхзвенныйклиновоймеханизм.
Подвижность плоских механизмов
 Подвижностьили числостепенейсвободыплоских механизмов определяют по формуле Чебышёва:
Подвижностьили числостепенейсвободыплоских механизмов определяют по формуле Чебышёва:, где n– количество звеньев, p5- число КП 5-го класса, p4 - 4-го. n-1
– число подвижных звеньев (т.к. подвижность стойки равна 0).
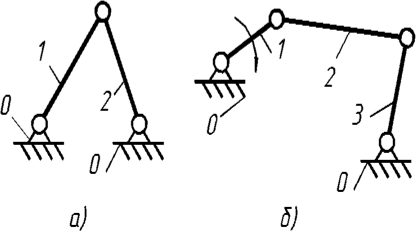 Пример. Если присоединим группу Ассура ВВВсвободными
Пример. Если присоединим группу Ассура ВВВсвободнымикинематическими парами к
стойке
(рис.а), то подвижность:
– коромысло; 4– шатун; 5– ползун.
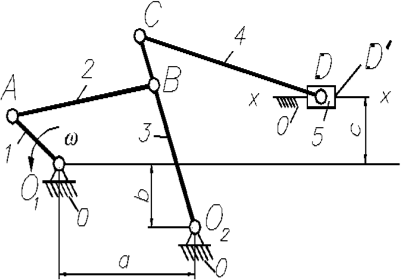
Пример структурного анализа рычажного механизма
Число звеньев п=6(на схеме механизма все подвижные звенья пронумерованы от 1 до 5, а неподвижное звено-
стойка, обозначено через 0).
0– стойка; 1– кривошип; 2– шатун; 3
Число низших кинематических пар р5= 7. Вращательные кинематические пары O1,A,B,C, O2,D образованы следующими звеньями: 0-1,1-2,2-3, 3-0,3-4, 4-5.
 Кинематическая пара D′, образованная звеньями 5-0, – поступательная. Высших кинематических пар р4в данном механизме нет.
Кинематическая пара D′, образованная звеньями 5-0, – поступательная. Высших кинематических пар р4в данном механизме нет.Подвижность механизма равна:
Это означает, что в рассматриваемом механизме достаточно задать закон движения только одному звену (в данном случае звену 1, которое является ведущим), чтобы закон движения всех остальных звеньев был бы вполне определенным.
Разложение механизма на группы Ассура.
Первая группа Ассура – кинематическая цепь из двух звеньев 2, 3и трех вращательных кинематических пар А, Ви О2(ВВВ).
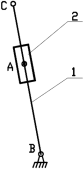
Вторая группа Ассура – кинематическая цепьиз двухзвеньев 4 и 5,
двух вращательных кинематических пар Си Dи поступательной пары 0-5(ВВП).
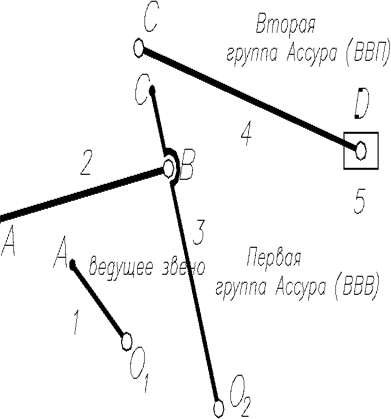 Оставшаяся часть механизма — ведущее звено (начальное звено) О1А— имеет степень подвижности w=1 .
Оставшаяся часть механизма — ведущее звено (начальное звено) О1А— имеет степень подвижности w=1 .Список литературы:
Артоболевский, И.И. Теория механизмов и машин : учеб. пособие для вузов / Гос. комитет по народному образованию. М. : Наука, 1988. – 640 с., ил. 2. Кожевников, С.Н. Теория механизмов и машин: учеб. пособие для вузов / М.: Машиностроение, 1969. – 584 с., ил.
Зиновьев, В.А. Курс теории механизмов и машин. Главная редакция физ.-мат. литературы. М. : Наука, 1972. – 384 с., ил.
Попов, С.А., Тимофеев, Г.А. Курсовое проектирование по теории механизмов и механике машин / под ред. К. В. Фролова; М. : Высшая школа, 1998. – 351 с., ил.
М.Б. Бородина, Б.А. Шевченко, Структурный и кинематический анализ механизмов. Часть 1. Методические указания по ТММ для студентов всех форм обучения специальностей ТМ, ММО и А. Старый Оскол, 2005, с. 60.
Б.А. Шевченко, М.Б. Бородина, Силовой анализ механизмов. Часть 2. Методические указания по ТММ для студентов всех форм обучения специальностей ТМ, ММО и А. Старый Оскол, 2008.