курсовая-работа. Применение пакета Stateflow для управления полетом ла в продольном движении
 Скачать 0.73 Mb. Скачать 0.73 Mb.
|

|
Министерство образования Российской Федерации Государственное образовательное учреждение высшего профессионального образования «Московский авиационный институт» (национальный исследовательский университет) Факультет №3 «Системы управления, информатика и электроэнергетика» Кафедра № 301 «Системы автоматического и интеллектуального управления» Курсовая работа по дисциплине: «Компьютерные технологии управления в технических системах» На тему: «Применение пакета Stateflow для управления полетом ЛА в продольном движении» Выполнил: студент группы М30-104М-16 Нгуен З. Т. Проверил: преподаватель кафедры 301 Михайлин Д. А. Москва 2016 Содержание Постановка задачи курсовой работы…………………………….....……. 3 Исходные данные ………………………………………………………….. 3 Введение ………………………………………………………………....…. 4 Продольное движение ………………………………………………. 5 Этапы выполнения курсовой работы ……………………………… 5 Система уравнений движения самолета в пространстве состояний......... 6 Структурная схема системы управления с помощью Simulink......................... 7 Алгоритм для решения поставленной задачи.…………….......................… 8 Сформировать диаграмму Stateflow по написанному алгоритму ..... ........ 9 Привести результаты моделирования для разных ситуаций в зависимости от остатка топлива на борту в процессе полета.……….........................… 10 Выводы…..…………….............................................................................…. 12 Список использованных источников............................................................. 13 Постановка задачи курсовой работы Выполнить маршрутный полет при ограничении в топливе. Написать алгоритм для решения поставленной задачи. Сформировать структурную схему системы управления, используя блок Stateflow в качестве сигнала управления. Построить имитационную модель самолета в Simulink'е и привести результаты моделирования для разных ситуаций в зависимости от остатка топлива на борту в процессе полета. 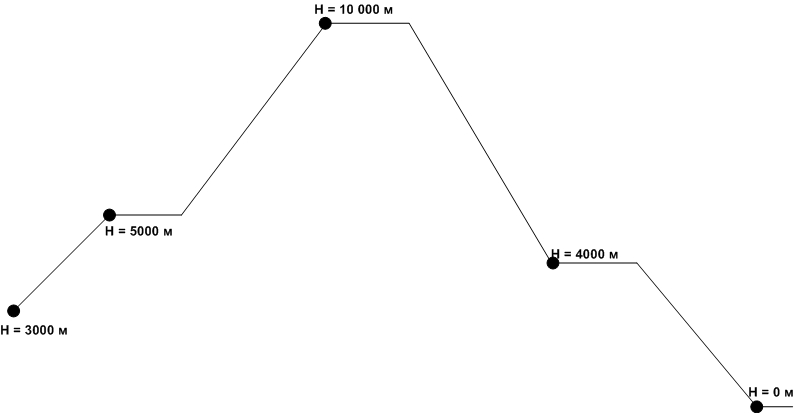 Рис. 1: Заданная траектория полета. Исходные данные

Значение аэродинамических коэффициентов в модели управления продольного движения самолёта: 
 Где m – масса топлива в момент времени t; m0 – масса топлива в момент времени t = 0; K – коэффициент расхода топлива (кг/с) t – время. Введение Продольное движение Продольное движение самолета включает вращательное движение самолета вокруг поперечной оси OZ, которая перпендикулярна плоскости симметрии самолета и направлена в сторону правого крыла, и поступательное движение по направлениям продольной OX и нормальной OY осей (рис. 2).  Рисунок 2 – Продольное движение самолёта Оси OX, OY и OZ образуют связанную систему координат OXYZ. Уравнения продольного движения получают, проектируя на оси скоростной системы координат OXаYа силы, действующие на самолет, и учитывая уравнение моментов относительно оси OZ связанной системы координат OXYZ (рис. 2). Ось OXа совмещается с вектором воздушной скорости, а ось OYа нормальна оси OXа и размещается в плоскости симметрии самолета. Углы α, ϑ и θ на рис. 2 характеризуют углы атаки, тангажа и угол наклона траектории, соответственно. Векторы  , ,  , ,  и и  определяют силу тяги двигателя, силу тяжести, аэродинамическую подъемную силу и силу лобового сопротивления. Положение вектора тяги зависит от угла установки двигателя определяют силу тяги двигателя, силу тяжести, аэродинамическую подъемную силу и силу лобового сопротивления. Положение вектора тяги зависит от угла установки двигателя  . На рис. 2 для упрощения точка приложения векторов тяги, подъемной силы и силы лобового сопротивления совмещены с центром тяжести. . На рис. 2 для упрощения точка приложения векторов тяги, подъемной силы и силы лобового сопротивления совмещены с центром тяжести.Этапы выполнения курсовой работы Исходя из условий постановки курсовой работы и исходных данных, можно выделить следующие этапы, решение которых позволит решить поставленную задачу:
Модель управления в пространстве состояний имеет вид:   Где X – вектор состояний  Y – вектор выхода  А - матрица системы. 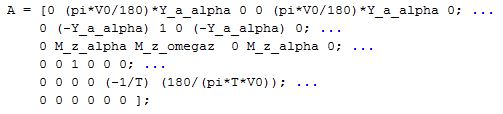 B – матрица управления. С – матрица выхода. 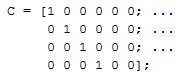 Исходные данные 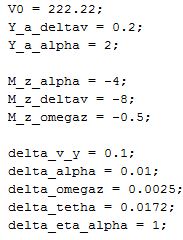 2. Сформировать структурную схему системы управления с помощью Simulink. Структурная схема системы управления изображена на рисунке 3 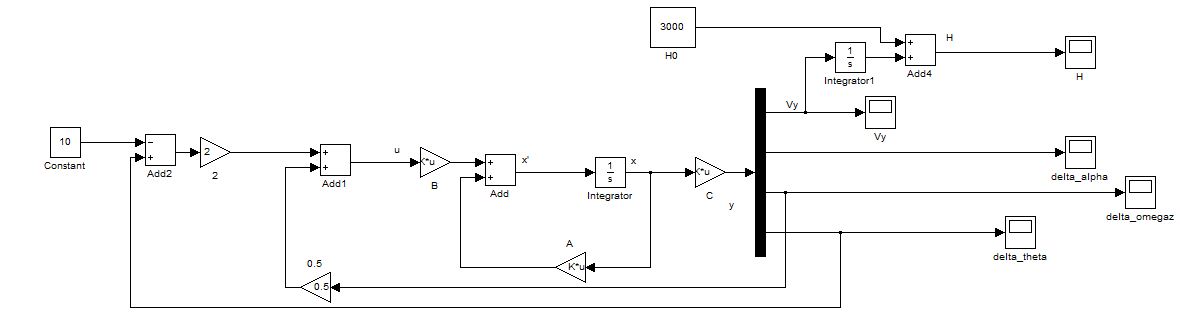 Рис. 3: Структурная схема системы управления. Матрицы А, В и С можно загружать в Simulink с помощью команд sim('modelirovanie1') open('modelirovanie1') 3. Алгоритм для решения поставленной задачи. Алгортим решения задачи выглядит следующим образом 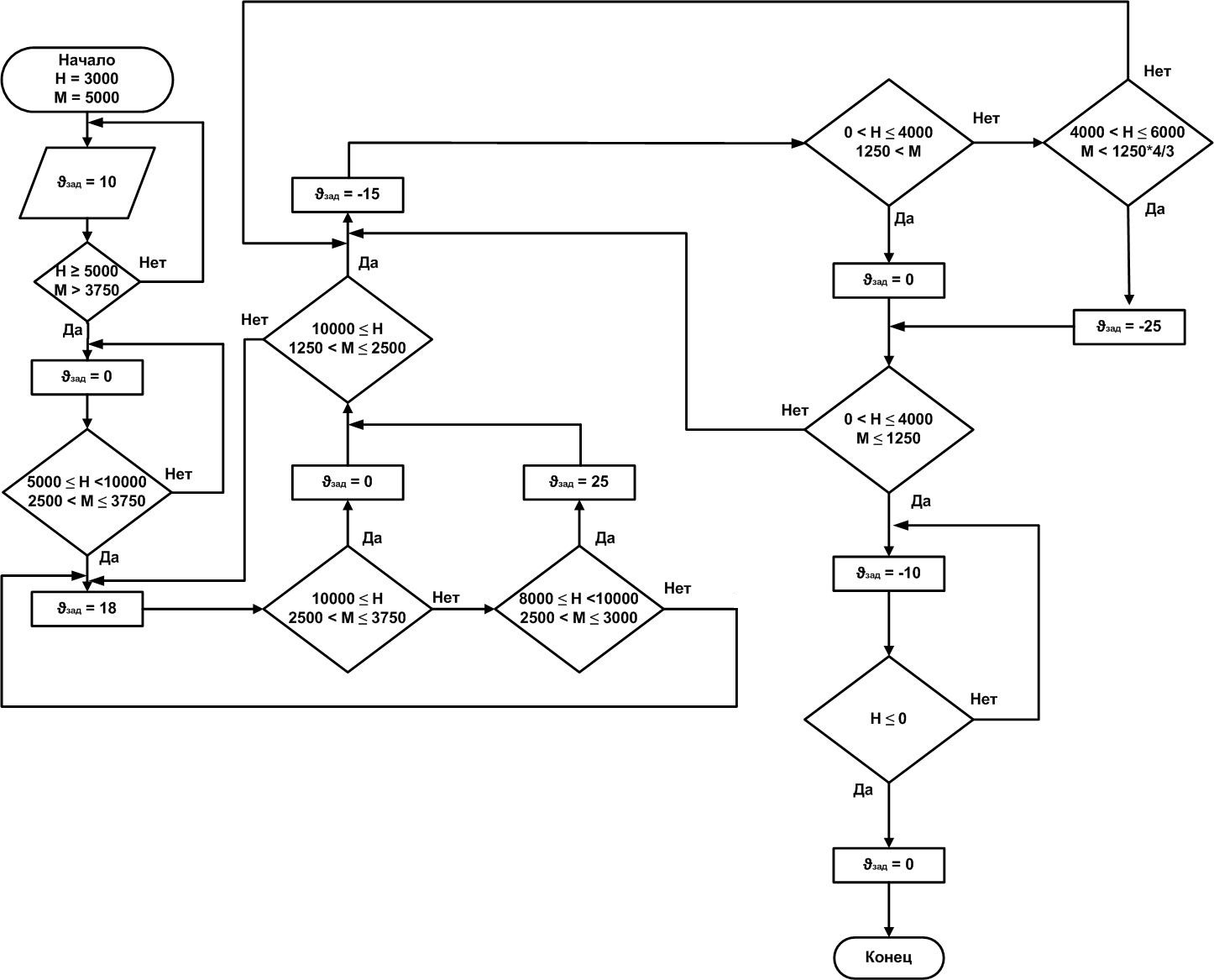 Где H – высота полета, М – остаток топлива а борту, ϑзад – заданный угол тангажа. Маршрутный полет можно разбит на 4 участка: 1- Самолет поднимается с высоты 3000 до 5000 метров под заданным углом тангажа ϑзад = 10о . ϑзад = 0о когда самолет достиг высоты Н = 5000 м. 2- Самолет поднимается с высоты 5000 до 10000 метров под заданным углом тангажа ϑзад = 18о . ϑзад = 0о когда самолет достиг высоты Н = 10000 м. 3- Самолет снижает высоту с 10000 до 4000 метров под заданным углом тангажа ϑзад = -15о . ϑзад = 0о когда самолет достиг высоты Н = 4000 м. 4- Самолет снижает высоту с 4000 до 0 метров под заданным углом тангажа ϑзад = -10о . ϑзад = 0о когда самолет приземлился. В алгоритме реализованы 2 ситуации, при которых появляется недостаток топлива на борту, нужно менять маршрутный полет.
4. Сформировать диаграмму Stateflow по написанному алгоритму. Блок Stateflow выглядит следующим образом 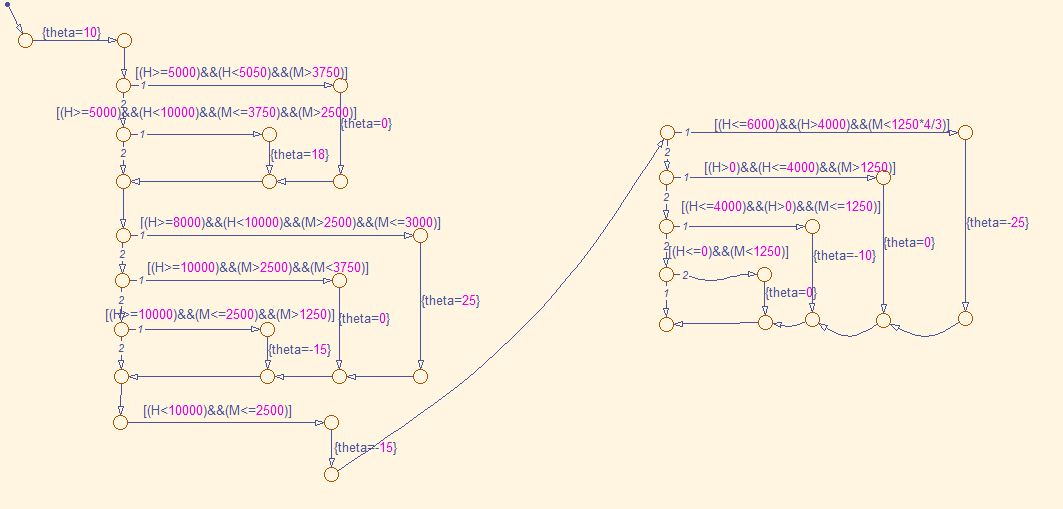 Рис. 4: Stateflow диаграмма.  Рис. 5: Блок Stateflow. Блок Stateflow имеет 2 входа H – высота полета, М – остаток топлива а борту и 1 выход theta – заданный угол тангажа.
Система управления моделируется с помощью пакета Simulink, где коэффициенты расхода топлива К1 = 15 кг/с и К2 = 10 кг/с можно выбрать с помощью переключателя “switch”. 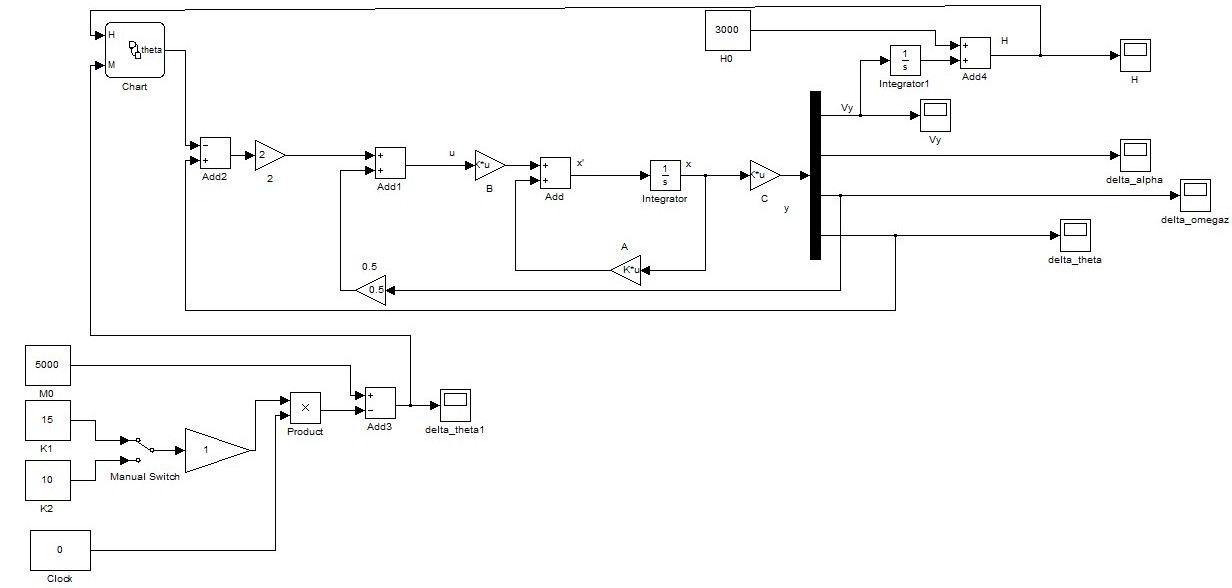 Рис. 6: Моделирование системы управления с помощью пакета Simulink. - Результаты моделирования: на рисунке 7 показан результат моделирования при К = К2 = 10 кг/с. 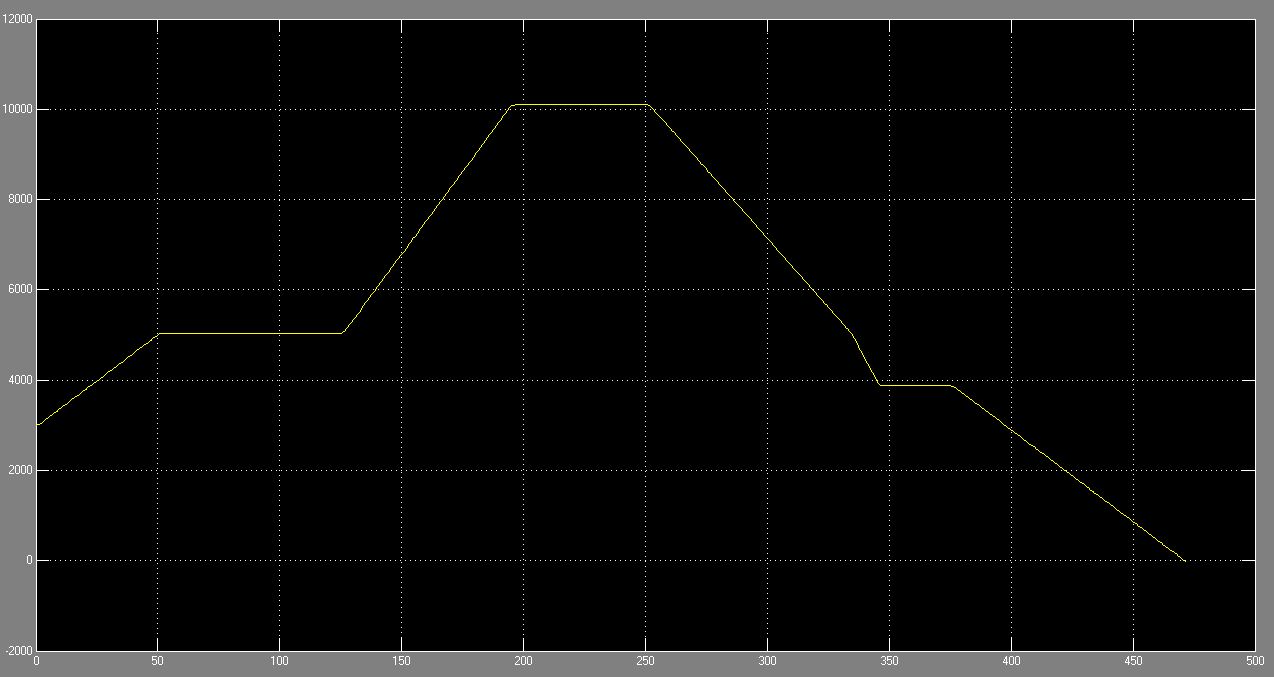 Рис. 7: Результат моделирования при К = К2 = 10 кг/с. Из рисунка 7 видно что в участке 10000 > H > 4000 в моменте Н = 5000 м выполняется условие Н ≤ 6000 и M ≤ 1667, может появляться недостаток топлива. Самолет перешел на новую траекторию, т.е он летает под заданным углом тагажа ϑзад = -25о. На рисунке 8 показан результат моделирования при К = К1 = 15 кг/с. 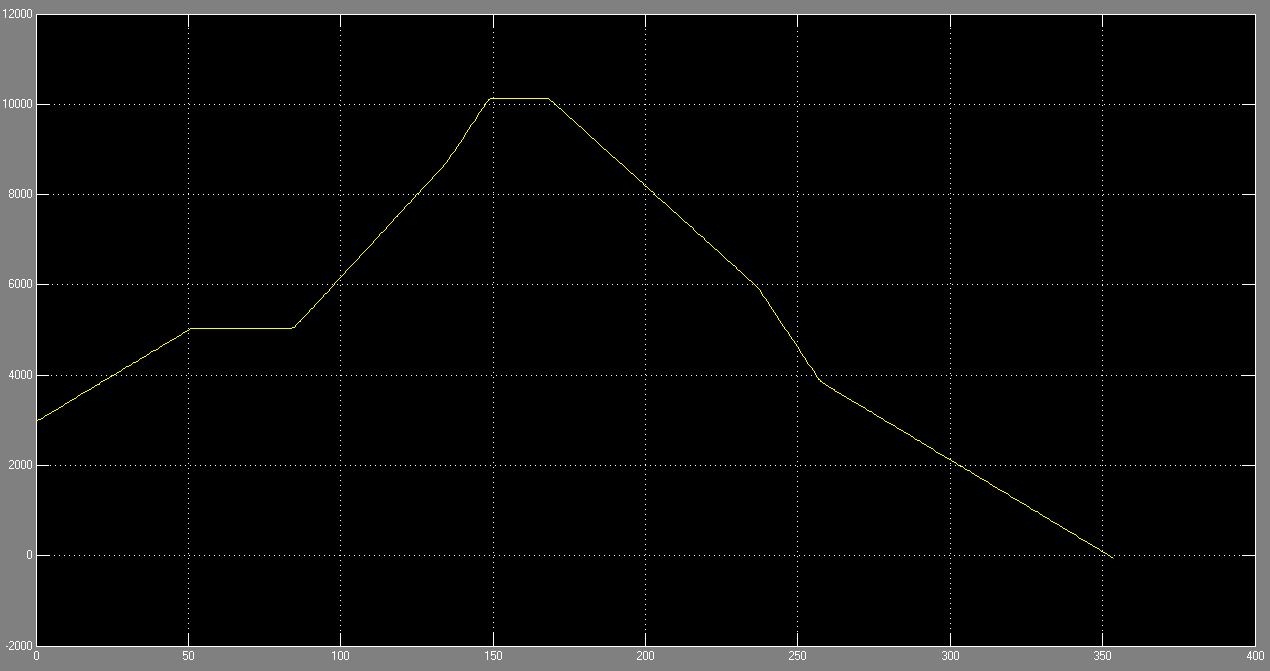 Рис. 8: Результат моделирования при К = К1 = 15 кг/с. Из рисунка 8 видно что в участке 5000 < H < 10000 в моменте Н = 8500 м выполняется условие Н ≥ 8000 и M ≤ 3000, может появляться недостаток топлива. Самолет перешел на новую траекторию, т.е он летает под заданным углом тагажа ϑзад = 25о и в участке 10000 > H > 4000 когда Н = 6000 м выполняется условие Н ≤ 6000 и M ≤ 1667, может появляться недостаток топлива. Самолет перешел на новую траекторию, т.е он летает под заданным углом тагажа ϑзад = -25о. Выводы В ходе курсовой работы проведен синтез системы управления продольным движением летательного аппарата при изменяющемся заданном угле тангажа, в программной среде MATLAB. В работе написан алгоритм управления заданным углом тагажа, который используется в качестве сигнала управления высотой маршрутного полета. Был использован пакет Stateflow для моделирования смены режима полета при разных условиях. Были выделены две ситуации, когда появляется недостаток топлива на борту самолета, нужно поменять маршрутный полет. Была построена имитационная модель движения самолета в Simulink и приведены результаты моделирования при разных коэффициентах расхода топлива. Результаты моделирования показывают, что полет осуществляется по планированному маршруту, из чего следует, что модель и алгоритм построены верно. Недостаток работы является большим временем моделирования, т.к написанный алгортим не оптимален. Список использованных источников
|