ттс. Технические средства судовождения.. Принцип действия радионавигационной системы с частотной селекцией сигналов
 Скачать 42.92 Kb. Скачать 42.92 Kb.
|

|
Содержание. Принцип действия радионавигационной системы с частотной селекцией сигналов…………………………………………………………….2 Виды отображения навигационной информации в приемоиндикаторе GP-32……………………………………………….……..8 Список литературы…………………………………………………11 Принцип действия радионавигационной системы с частотной селекцией сигналов. Общие положения. Радионавигационная система (РНС) – это особый радиотехнический комплекс, в основном предназначенный для определения судами своего местоположения. В качестве дополнительных навигационных задач РНС могут рассчитывать путевой угол, скорость, обеспечивать движение по заданному маршруту, информировать судоводителя о дате, времени и т.д. Особенность такого комплекса заключается в том, что он создаёт в пространстве только ему присущую координатную систему, и определения в ней возможны лишь при наличии на судне специального прибора – приёмоиндикатора этой РНС. Следует заметить, что некоторые РНС (например, среднеорбитальные спутниковые) помимо стандартной координатной сетки (открытой для общего пользования) создают уточнённую. Использование последней защищено либо специальными кодами доступа, либо требует (дифференциальные подсистемы) включения в стандартную схему приёмоиндикатора дополнительных устройств. Любая РНС состоит из сети радиоизлучателей, используемых в качестве навигационных ориентиров (НО). Замеряя с помощью судового приёмоиндикатора (ПИ) какие–либо характеристики этих ориентиров, можно получить ряд изолиний положения (навигационных параметров, НП). Район пересечения этих изолиний в итоге даст обсервованную позицию судна. В зависимости от замеряемой характеристики навигационного ориентира различают соответствующие виды навигационных параметров. Так, например, для измеренного расстояния – это будет окружность, для разности расстояний – гипербола, для угла – прямая (при определённых допущениях) и пр. Использование параметров двух первых видов очень широко практикуется в современных РНС. В частности, измерения дальности составляют основу спутниковых РНС второго поколения, а разностно-дальномерные – спутниковых систем первого поколения и подавляющего большинства наземных РНС. Для производства измерений дальности требуется высокая степень временной синхронизации в работе навигационных ориентиров и приёмоиндикатора. Сейчас это достигается применением атомных стандартов частоты. При разностно-дальномерном способе измеряется разность расстояний до двух навигационных ориентиров. Этому параметру эквивалентно либо время запаздывания высокочастотного импульса одного ориентира относительно другого, либо разность фаз электромагнитных колебаний, пришедших в точку приёма от этих ориентиров. В первом случае требуется чёткая синхронизация излучений ориентиров, во втором – когерентность их работы. При этом первые системы принято называть импульсными, вторые – фазовыми. Широко распространены наземные РНС, использующие комбинацию этих способов замера. Такие системы называются импульсно–фазовыми. Классификация РНС В основу классификации РНС положены различные признаки, основными из которых являются следующие. 1. Вариант размещения навигационных ориентиров 1.1. Спутниковые(GPS, ГЛОНАСС, КОСПАС-SARSAT) 1.2. Наземные (Лоран–с, Чайка) 2. Вид используемого навигационного параметра (вид создаваемых изолиний) 2.1. Дальномерные (GPS, ГЛОНАСС) 2.2. Разностно-дальномерные (Лоран–с, Чайка, КОСПАС-SARSAT) 2.3. Радиально–скоростные 3. Вид измеряемого радионавигационного параметра 3.1. Угломерные 3.2. Импульсные (временные, Лоран–а) 3.3. Фазовые (РСДН) 3.4. Импульсно–фазовые (Лоран–с, Чайка). 3.5. Частотные (Цикада). 4. Диапазон используемых радиоволн 4.1. Сверхдлинноволновые 4.2. Длинноволновые (Лоран–с) 4.3. Средневолновые 4.4. Ультракоротковолновые (Все спутниковые РНС) 5. Дальность действия 5.1. Глобальные (спутниковые РНС) 5.2. Дальнего радиуса действия (дальней навигации, радиус действия до 1500 миль Лоран–с, Чайка) 5.3. Системы средней дальности (радиус действия до 500 миль) 5.4. Системы прибрежного плавания (радиус действия до 100 миль, гидрографическая РНС Хайфикс) Фазовые РНС с частотной селекцией сигналов При частотной селекции сигналов навигационные излучатели работают непрерывно, каждый на собственной частоте. При этом навигационному параметру – разности расстояний соответствует радионавигационный параметр – разность фаз электромагнитных колебаний, пришедших в точку приёма от двух излучателей:
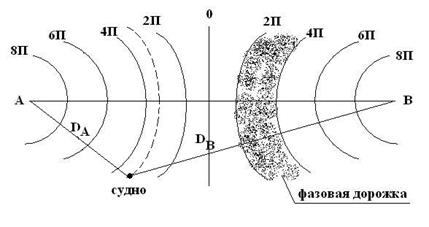
где ∆φ – разность фаз; λср – длина волны сравнения; DA, DB – расстояния от потребителя до навигационных ориентиров (рис. 1). Как видно из зависимости (1) постоянной разности фаз будет соответствовать постоянная разность расстояний на поверхности земли, т.е. изолиниями в фазовой РНС являются гиперболы. Под разностью фаз здесь следует понимать число периодов колебаний (длин волн), на которое одно излучение отстаёт от другого. Для измерения разности фаз необходимо, чтобы колебания источников были когерентны. В общем случае когерентными называются колебания либо одинаковых частот, либо разных, но таких, которые находятся в целочисленном соотношении с некоторой общей для них частотой, именуемой базисной. Именно по последнему принципу работают навигационные излучатели в РНС с частотой селекцией сигналов. При подобной работе результирующее электромагнитное поле от двух излучателей будет иметь такую навигационную структуру, как если бы оба они излучали одну частоту, равную наименьшему общему кратному их рабочих частот. Эту частоту принято называть частотой сравнения. Для этой частоты в рабочем пространстве пары излучателей образуется семейство гипербол, каждой из которых соответствует своя разность фаз. Часть пространства между двумя гиперболами с относительным фазовым сдвигом в 2( (в длину волны сравнения) называется фазовой дорожкой. Упомянутое семейство гипербол образует в рабочем пространстве пары излучателей множество фазовых дорожек (рис. 1). В общем случае измеренная разность фаз должна включать в себя целую и дробную часть (в разности расстояний обычно укладывается не целое число длин волн сравнения). По сути своей целая часть указывает на номер фазовой дорожки, а дробная – на ту гиперболу положения, которой в пределах этой дорожки соответствует положение судна в момент измерения. Однако для непрерывных колебаний разность фаз можно замерить только в пределах одного периода колебаний (в пределах одной фазовой дорожки), т.е. замеру поддаётся лишь дробная часть разности фаз, а целая остаётся неизвестной. На практике это означает, что полученный результат с равной вероятностью можно отнести к любой точной фазовой дорожке. Этот весьма существенный недостаток всех фазовых РНС называется многозначностью фазовых определений.
Рис. 1. Принцип работы фазовой РНС Очевидно, что для уменьшения степени многозначности необходимо понижать частоту сравнения. При этом ширина фазовых дорожек увеличивается и, следовательно, в рабочем пространстве пары излучателей будет укладываться их меньшее количество. В идеале многозначность не наступает вообще, если длина волны сравнения превосходит базовую линию между излучателями. Однако столь низкие частоты сравнения не используются, т.к. это существенно снижает точность определений. Для решения проблемы многозначности не в ущерб точности такие РНС работают в двух режимах. Первый (нормальный рабочий режим) на высоких частотах сравнения создаёт семейство точных фазовых дорожек. Замеренная разность фаз при этом будет давать гиперболу положения в пределах какой–то (пока неизвестной) из этих дорожек. Второй (режим устранения многозначности) создаёт семейство грубых (широких) дорожек на пониженных (в несколько десятков раз) частотах сравнения. Степень понижения частоты выбирается так, чтобы точность замера была не хуже такой, которая позволяла бы однозначно указать на то, в пределах какой точной дорожки предыдущего режима находится судно. Обычно пониженной частотой сравнения является базисная частота, а грубые дорожки, созданные на ней, называются зонами. Следует отметить, что применение данного метода полностью многозначность не устраняет, т.к. после понижения частоты сравнения в рабочем пространстве пары станций сохраняется более одной зоны. Следовательно, предварительно необходимо определение с точностью до зоны. Определить зону не представляется затруднительным, если ведётся счисление, т.к. ширина её достаточно велика (составляет несколько десятков километров). 2. Виды отображения навигационной информации в приемоиндикаторе GP-32. Furuno GP-32 - компактный и водонепроницаемый GPS-приёмоиндикатор. Прибор GP-32 компании Furuno имеет большое количество особенностей ипрекрасно подходящий для широкого диапазона небольших рыбацких лодок и навигации в прогулочных катерах. Этот GPS-приемник стал продолжением предыдущей, в своё время популярной, модели GP-31. Модель GP-32 обеспечивает точное и надежное определение местоположения, благодаря чувствительному приемнику GPS с 12 каналами, объединенному с интегрированной технологией WAAS. GPS-приёмоиндикатор Furuno GP-32 имеет прочный водонепроницаемый корпус и создан, чтобы противостоять жестким морским условиям. Устройство GP-32 может хранить в памяти до 1 000 точек, в которых когда-либо находилось судно, также есть возможность создавать и хранить в памяти 50 маршрутов из 30 точек каждый. Все навигационные данные отображаются на 4,5 дюймовом высококонтрастным LCD дисплее с антибликовым покрытием. Furuno GP-32 представляет собой компактный водонепроницаемый GPS-приемоиндикатор с высокими характеристиками, спроектированный для малых судов. Его высокочувствительный 12-канальный приемник GPS позволяет с высокой точностью и надежность определить местоположение. GPS-приёмоиндикаторGP-32 представляет ряд простых в использовании режимов отображения в графической и буквенно-цифровой формах: видеоплоттер, путь, дисплей управления и навигационные данные. С помощью плоттера и дисплея управления можно выбрать оптимальный путь судна, а также место расположения следующей путевой точки по отношению к судну. GPS-приемник Furuno GP-32 принимает данные корректировки DGPS с внешнего приемника поправок DGPS в тех случаях, когда требуемая точность местоположения выше, чем нормальная. Навигационная информация, отображаемая прибором GP-32, включает местоположение судна, скорость, курс, расстояние/азимут и ETA/TTG к намеченной точке пути или положение MOB высвечивается в виде крупных и легких для восприятия знаков. Особенности GPS-приемника Furuno GP-32: 12-ти канальный приемник GPS (Parallel Tracking) с технологией WAAS и возможностью работы DGPS Вектор путевой скорости до 900 морских миль 20-ти сек. готовность при перезапуске системы Точность 1-3 м (95% времени с включенной WAAS) 4.5-дюймовый LCD серебристый экран, монохромный, высокая контрастность изображения Возможность передачи данных о путевых точках и маршруте через ПК на другой приемник GP32 5 Режимов работы дисплея 1. Плоттер - 14 масштабов карт: 0.2 - 320 морск. миль 2. Навигационные данные - индикация местоположения судна: координаты (широта/долгота) или Loran-C TD's 3. Управление судном - графическое отображение данных о курсе судна, его местоположении и скорости 4. Магистраль - 8 шкал дальности: 0.2 - 16 морских миль 5. Спидометр с аналоговым или цифровым дисплеем + Два настраиваемых пользователем режима Кнопка 'Человек за бортом' Ввод путевой точки посредством Loran-C TD's (Режим Магистраль) Сигнализация прибытия, XTE, якорной вахты, точек высокой/низкой скорости Объем памяти: 1000 точек трека судна, 999 путевых точек и меток, 50 маршрутов (до 30 путевых точек на каждый маршрут) Комментарий к путевой точке (до 16 знаков) 9 символов для обозначения того или иного события 2 порта данных: токовая петля и RS232 Передача навигационных данных на РЛС, картплоттер, авторулевой, эхолот через порт NMEA0183 Загрузка путевых точек/маршрутов напрямую с дисплея NavNet Встроенная моделирующая программа для демонстрации устройства в выставочном зале/во время обучения Список литературы. Лобанов В.А., «СИСТЕМЫ РАДИОНАВИГАЦИИ» Конспект лекций по дисциплинам РНП и ЭРНП для студентов судоводительской и электромеханической специальностей очной и заочной формы обучения. Издательство ВГАВТ, Н. Новгород, 2007 |