курсовая. Проект автоматизации технологической линии скребкового навозоуборочного транспортера tch160
 Скачать 312.89 Kb. Скачать 312.89 Kb.
|

|
ДЕПАРТАМЕНТ ВНУТРЕННЕЙ И КАДРОВОЙ ПОЛИТИКИ БЕЛГОРОДСКОЙ ОБЛАСТИ ОБЛАСТНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ПРОФЕССТОНАЛЬНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ «РАКИТЯНСКИЙ АГРОТЕХНОЛОГИЧЕСКИЙ ТЕХНИКУМ» КУРСОВОЙ ПРОЕКТ Тема: Проект автоматизации технологической линии скребкового навозоуборочного транспортера TCH-160 Студент: Крисанов Сергей Юрьевич Группа № 7.3 Э Работа выполнена_________________ (подпись студента) Руководитель работы _________/Бучнев А.Г. «__»_________2020г. (подпись, Ф.И.О) К ЗАЩИТЕ ДОПУЩЕН Руководитель работы __________А.Г. Бучнев «__»_____________2020 г. Дата защиты «__»_________2020 г. Оценка____________ пос. Ракитное, 2020 г. 1. Введение 2. Характеристика объекта автоматизации 3.Характеристика рабочей машины 4. Технологическая схема навозоуборочного транспортера 5. Разработка принципиальной эл. схемы автоматизации 6. Расчет и выбор элементов схемы автоматизации 7.Расчет освещения и выбор защитной аппаратуры. 8. Расчет и выбор марки сечения проводов, способ их прокладки 9.Составление перечня элементов схемы автоматизации 10. Заключение 11. Литература II. Графическая часть проекта Лист 1. План объекта с нанесением силовой и осветительной сети Лист 2. Технологическая и электрическая схемы автоматизации 1. Введение Основная задача агропромышленного комплекса на современном этапе увеличение производства конкурентоспособной продукции путем технического перевооружения животноводства, внедрения автоматизированных, роторно-конвейерных поточно-технических линий и роботизированных комплексов; комплексной механизации производства и широкого использования ЭВМ в управлении технологическими процессами и оборудованием. За основу своей курсовой работы я взял одну из ферм компании «Мираторг». Особое значение приобретают проблемы снижения себестоимости продукции и повышения рентабельности животноводства. Построенные по типовым проектам 70-х годов прошлого столетия животноводческие фермы и комплексы, оснащенные малоэффективным, металлоемким и энергоемким оборудованием, в настоящее время не обеспечивают решения этой задачи. Одно из основных направлений развития животноводства – техническое перевооружение этой отрасли, проектирование и строительство новых животноводческих ферм, а так же реконструкция старых существующих ферм и оснащение их современным оборудованием. Соблюдение экономических норм тоже немаловажно, так как перевод животноводства на промышленную основу знаменует собой новый этап в развитии сельского хозяйства, который характеризуется высоким уровнем экономической эффективности производства и продуктивности. Вместе с тем концентрация больших групп животных на ограниченной площади и беспривязное содержание их приводят к тому, что на животноводческих комплексах получается огромный выход жидкого навоза. Так, при производстве 1 кг молока количество навоза составляет до 5 кг. На свиноводческом комплексе по выращиванию и откорму 108 тыс. голов в год при гидросмывном способе уборки навоза из помещений ежегодно накапливается до 1 млн. м3 навозных стоков, что по степени загрязненности соответствует количеству фекально-бытовых стоков от города с населением до 200 тыс. человек. Однако следует отметить, что в этом объеме навозных стоков содержится до 1,5 тыс. т азота, до 800т фосфора и до 1,3 т калия, которыми можно удобрить до 5 тыс. га сельскохозяйственных угодий. Из этого очевидно, что проблема рационального использования навоза как органического удобрения для создания собственной кормовой базы (получение необходимого количества дешевых полноценных кормов) при одновременном соблюдении требований охраны окружающей природной среды (почвы, воздушного бассейна, водоемов) от загрязнения отходами промышленного животноводства имеет исключительно важное народнохозяйственное значение. Эта проблема в целом относится к числу наиболее сложных, так как ее решение находится на стыке различных отраслей научно-технических знаний. Комплексное и эффективное решение стоящей проблемы требует системного подхода, включающего рассмотрение во взаимосвязи производственных операций по всей технологической линии: от стойла животного до места полной реализации навоза с учетом соблюдения требований охраны природы и обеспечения, необходимых санитарно-гигиенических условий работы обслуживающего персонала. В связи с концентрацией поголовья на крупных фермах и комплексах вместо обычного твердого (подстилочного) навоза стали получать жидкий, бес подстилочный. Поэтому в настоящее время применяются две совершенно различные технологии уборки, удаления, хранения и переработки с получением твердого или жидкого навоза. В любом случае конечной операцией в технологии уборки навоза является его хранение. 2. Характеристика объекта автоматизации Характеристика объекта автоматизации Объектом автоматизации рассматриваемым в данном курсовом проекте является коровник для выращивания и откорма 100 голов в год. План коровника для выращивания и откорма 100 голов в год (для подсобных хозяйств 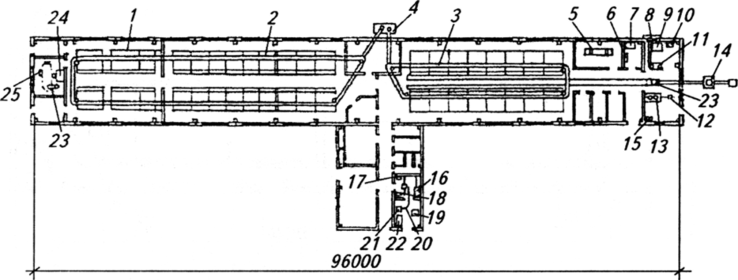 Размещение технологического оборудования в коровнике для выращивания и откорма 100 голов в год: для уборки навоза используется скребковый навозоуборочный транспортер TCH-160 Разработанная классификация, включает механическую и гидравлическую системы средств механизации для сбора и удаления навоза. В свою очередь механическая система содержит мобильные и стационарные средства, применяемые для сбора, удаления и обработки как твердого, так и жидкого навоза. Скребковый навозоуборочный транспортер ТСН – 160 Предназначен для тех же целей, что и ТСН – 2,0Б. Он состоит из самостоятельного горизонтального и наклонного транспортеров и шкафа управления. Первый включает круглозвенную термически обработанную цепь с укрепленными на ней металлическими скребками, автоматические натяжное и поворотные устройства и привод. В состав последнего входят электродвигатель, двухступенчатый редуктор с передаточным числом 38,86 и расположенное за ним ременная пяти ручьевая передача. Горизонтальный транспортер укладывается в бетонный лоток, внутренняя часть дна которого армируется стальной полосой 4x20 мм. Наклонный транспортер имеет такую же круглозвенную цепь со скребками, металлический желоб с опорной стойкой, поворотное и натяжное устройства и привод, состоящий из электродвигателя и двухступенчатого цилиндрического редуктора с передаточным числом 27,85. При температуре воздуха ниже 263 К помещения, в котором размещается наклонный транспортер, должно отапливаться. Он устанавливается под углом не более 30˚ к горизонту, что позволяет обеспечивать подачу навоза на высоту 2650 мм от нулевой отметки пола коровника. Высота помещения, в котором устанавливается транспортер, должна быть не менее 3350 мм. Звенья транспортера ТСН – 160 (16x80 мм) заготавливаются из прутка диаметром 20 мм. Горизонтальный транспортер имеет автоматическое самонатяжное устройство гравитационного действия. Консольно укрепленные на цепи скребки перемещают навоз в сторону наклонного выгрузного транспортера, который через клиноременную передачу, редуктор и ведущую звездочку приводится в работу от электродвигателя мощностью 4 кВт. Скорость движения скребков равна 0,19 м/с, а шаг – 1,12 м. Наклонный транспортер приводится от электродвигателя мощностью 1,5 кВт и имеет скорость движения цепи, равную 0,72 м/с. Натяжение цепи наклонного транспортера регулируется винтом. Рассмотрев все имеющиеся, на данным момент, навозоуборочные средства и оценив их технические характеристики выберем для курсового проекта скребковый навозоуборочный транспортер ТСН – 160. 3. Характеристика рабочей машины Транспортер скребковый предназначен для уборки подстилочного навоза из животноводческих помещений с одновременной погрузкой в транспортные средства. Преимущественно используется при привязном содержании скота. Состоит из горизонтального и наклонного транспортера. Горизонтальный транспортер производит очистку навозного канала и транспортировку навоза до места сброса на наклонный транспортер. Наклонный транспортер принимает навоз с горизонтального транспортера и погружает его в транспортное средство. Число обслуживаемых стойл крупного рогатого скота 100-110. Технические характеристики ТСН-160
4. Технологическая схема навозоуборочного транспортера 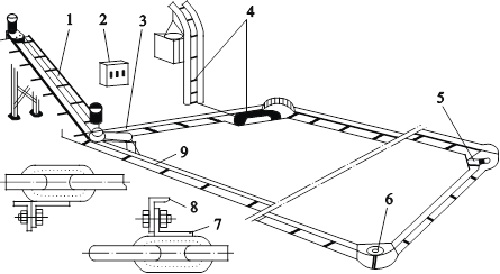
Скребковый транспортер состоит из горизонтального и наклонного транспортеров и шкафа управления. Каждый из транспортеров имеет отдельный привод и независимое включение в работу из шкафа управления. Горизонтальный транспортер устанавливают в навозных канавках, расположенных вдоль рядов стойл в помещениях для КРС или внутри станков — в помещениях для свиней. Навоз в навозные канавки сбрасывается операторами вручную специальными скребками. Скребками горизонтального транспортера навоз забирается из навозных канавок и перемещается к наклонному транспортеру, который грузит навоз в транспортные средства. 5. Разработка принципиальной эл. схемы автоматизации Принцип работы электрической принципиальной схемы Скребковый транспортер кругового движения ТСН-160 (рис. 2, а), предназначенный для механизации уборки навоза из животноводческого помещения (горизонтальный транспортер) и одновременной погрузки его в транспортное средство (наклонный транспортер). С помощью переключателя SA (рис. 2, б) выбирают дистанционное (Р) или автоматическое (А) управление транспортерами. Дистанционно управляют кнопками SB1 и SB2. Нажатием кнопки SB1 включают реле времени КТ, которое своими контактами КТ:2 включает магнитный пускатель КМ2 электропривода наклонного транспортера. Затем контакты КТ:1 включают магнитный пускатель КМ1 электропривода горизонтального транспортера. Транспортеры выгружают навоз в транспортную тележку 2 в течение определенного времени до размыкания контактов КТ:2. При этом отключается горизонтальный транспортер. Затем размыкаются контакты КТ:1 и отключается наклонный транспортер с выдержкой времени, достаточной для полного освобождения транспортеров от навоза.  6.Расчет и выбор элементов схемы автоматизации Определим максимально возможную нагрузку в начале уборки, затем по условиям пуска определим достаточный пусковой момент и мощность электродвигателя. Определим усилие транспортной цепи при работе на холостом ходу по формуле: где m - масса одного метра цепи со скребками, m=2.8 кг /2/; g - ускорение силы тяжести, g =9.81 м/с2 ; l - длина цепи, l=160 м; fx - коэффициент трения цепи по настилу, fx =0,5; Fx=2.8*9.81*160*0.5=2197,4 усилие затрачиваемое на преодоление сопротивления трения навоза о дно канала при его перемещении по каналу: где mн - масса навоза в канале, кг; fн - коэффициент трения навоза о дно канала, fx =0.97 /2/; где N - число животных обслуживаемых одним транспортёром, N =100 гол; m1 - суточный выход навоза от одного животного, m1 =6.6 кг; z - число уборок навоза в сутки, z =2; Mn=100*6,6/2= 330кг Усилие на преодоление сопротивления заклинивания навоза, возникающее между скребками и стенками канала: где F1 - усилие затрачиваемое на преодоление сопротивления заклинивания, приходящееся на один скребок, F1 =15 Н /2/; а - расстояние между скребками, а=1.12 м; Fз=160*15/1,12= 2142,8 H Усилие затрачиваемое на преодоление сопротивления трения навоза о боковые стенки канала: где Р Б - давление навоза о боковые стенки канала, Н; P=0,3*330*9,81=971,6H, F=971,6*0,97=942H Определим общее максимальное усилие необходимое для перемещения навоза в канале, когда весь транспортер загружен: Fmax=9420,5+942+2142,8+2197,4=14702,7H Момент приведеный к валу электродвигателя при максимальной нагрузке: где - угловая скорость электродвигателя, рад/с; ?н - коэффициент полезного действия передачи, ?н =0.75 /4/; где n - синхронная частота вращения, n =1500 об/мин; Mmax=14702,7*0,18/157*0,75=25,4 H*m Учитывая, что момент сопротивления, приведенный к валу электродвигателя увеличивается при трогании транспортёра, то момент трогания: Mmnp=1,2*25,4=30,5 Определим требуемый момент электродвигателя: где Мп - кратность пускового момента, Мп =2; к - коэффициент снижения напряжения при пуске, к =0.8…0.9 /5/; M=30,5/0,9*2=18,8 Определим необходимую мощность электродвигателя по формуле: P=18,8*157=2951,6 Вт Мощность двигателя для горизонтального транспортёра выбираем исходя из следующего условия: где Рн - номинальная мощность выбранного электродвигателя, кВт; Выбираем электродвигатель марки АИР 100 L4P3 4кВт>2,9 кВт Определим мощность электродвигателя наклонного транспортёра ТСН-160: свинарник вентиляция навозоуборочный транспортер где Q - подача транспортёра, Q =6 т/ч /2/; ?п - коэффициент полезного действия передачи, ?п =0.75 /4/; l - горизонтальная составляющая пути перемещения груза, l=15 м; f- коэффициент трения, f=3 /2/; h - высота подъёма груза, h =2,65 м; ?т - коэффициент полезного действия передачи, ?т =0.5 [2]; P=6/367*0,75*(15*3+2,65/0,5) = 1,9кВт Выбираем электродвигатель марки АИР80В2У3 2,2кВт>1,9 Таблица №1 «Технические данные электродвигателей»
Выбор автоматических выключателей для двигателей и их проверка на правильность выбора. Используя известный ток двигателя скребкового транспортера АИР 100 L4P3 Iн = 15,1 (А), выбираем автоматический выключатель ВА51Г25 с Iном. р. = 25 (А) Выбор и настройку автоматов производят по силе номинального тока расцепителя следующим образом: а) Записываем условие Iном. р. ≥ Iр; где Iр. – сила расчетного тока защищаемой цепи (в нашем случае это номинальный ток электродвигателя). б) Находим кратность силы расчетного тока и определяют уставку автомата. k = Iр / Iном. р. = 15,1/25=0,6 в) Проверяем выбранный автомат на кратность силы расчетного тока по справочнику 0,6. Выбранный автомат подходит для наших целей. г) Проверяем выбранный автомат на возможность срабатывания при пуске по условию Iср.р. ≤ Iср.к. Сила пускового тока двигателя: Iпуск.дв. = 7*Iн = 7*15,1= 105,7 (А) Сила расчетного тока срабатывания автомата при пуске двигателя: Iср.р. = 1,25* Iпуск.дв. = 1,25*105,7=132,1 Формула вычисления значения каталожного тока срабатывания указана в графе 5, приложения №4: Iср.к. = 12* Iном. р. = 12*25 = 300 (А) Как видно условие проверки выполняется Iср.р. ≤ Iср.к., 132,1(А) ≤ 300(А). Поэтому автомат при пуске двигателя не срабатывает. Выбор автоматических выключателей для двигателя наклонного транспортера Используя известный ток двигателя горизонтального транспортера АИР80В2У3 Iн = 4,9 (А), выбираем автоматический выключатель ВА51Г25 с Iном. р. = 10 (А). Выбор и настройку автоматов производят по силе номинального тока расцепителя следующим образом: а) Записываем условие Iном. р. ≥ Iр; где Iр. – сила расчетного тока защищаемой цепи (в нашем случае это номинальный ток электродвигателя). б) Находим кратность силы расчетного тока и определяют уставку автомата. k = Iр / Iном. р. = 4,9/10 = 0,49. в) Проверяем выбранный автомат на кратность силы расчетного тока по справочнику 0,49. Выбранный автомат подходит для наших целей. г) Проверяем выбранный автомат на возможность срабатывания при пуске по условию Iср.р. ≤ Iср.к. Сила пускового тока двигателя: Iпуск.дв. = 7*Iн = 7*4,9 = 34,3 (А) Сила расчетного тока срабатывания автомата при пуске двигателя: Iср.р. = 1,25* Iпуск.дв. = 1,25*34,3 = 42,9 (А) Формула вычисления значения каталожного тока срабатывания указана в графе 5, приложения №4: Iср.к. = 12* Iном. р. = 12*10 = 120 (А) Как видно условие проверки выполняется Iср.р. ≤ Iср.к., 42,9(А) ≤ 120(А). Поэтому автомат при пуске двигателя не срабатывает. Выбор автоматического выключателя на вводе и его проверка на правильность выбора Выбираем расцепитель из справочной литературы по условию: Iном. р. ≥ m∑Iр, где ∑Iр - сумма рабочих токов всех двигателей. ∑Iр = Iр1 + Iр2 = 15,1+ 4,9 = 20 (А) Выбираем автоматический выключатель ВА51Г25 с Iном. р.= 25 (А) Проверяем выбранный автомат на возможность срабатывания при пуске по условию: Iср.р. ≤ Iср.к., где Iср.р. = Кн.э. Imax Imax = Iр + Iпуск.дв. = 4,9+ 132,1= 137(А) де Iпуск.дв – пусковой ток самого мощного двигателя. В нашем случае – это пусковой ток двигателя АИР 100 L4P3 , а Iр – рабочий ток двигателя горизонтального транспортера. Подставляем в выражение Iср.р. = Кн.э. Imax данные: Iср.р. = 1,5*137=205,5(А) Находим каталожный ток срабатывания: Iср.к. = 12* Iном. р. = 12*25 = 300 (А), Как видно условие проверки выполняется Iср.р. ≤ Iср.к., =205,5(А) ≤ 300(А). Поэтому автомат при пуске двигателя не срабатывает. Выбор магнитных пускателей и тепловых реле для выбранных двигателей и их проверка. Магнитные пускатели выбираем из приложения №5 по условию: Iн.пуск. > Iн, где Iн.пуск. – номинальный ток пускателя, Iн – номинальный ток двигателя Для двигателя АИР100 L4P3 с Iн = 15,1(А) выбираем контактор электромагнитный ПМ12-025101 230 с номинальным током Iн.пуск.= 25(А) 25(А) > 15,1(А) Проверяем условия коммутации магнитного пускателя: Iн.пуск. ≥ I пуск.дв./6, где I пуск.дв – пусковой ток двигателя I пуск.дв. = Iн*Ki/6 = 15,1*7/6=17,6(А) где Ki – кратность пускового тока (таблица №2) Как видно условие проверки выполняется Iн.пуск. ≥ I пуск.дв./6., 25(А) ≥ 17,6(А) Руководствуясь номинальным током пускателя Iн.пуск, из Каталога указанного в литературе, выбираем тепловое реле РТИ 1322 с номинальным током Iн.т.р. = 25 (А) и пределом регулирования силы тока несрабатывания 17…25 (А) Для двигателя АИР80В2У3 с Iн = 4,9(А) выбираем контактор электромагнитный ПМ12-010100 230 с номинальным током Iн.пуск.= 10(А) 10(А) > 4,9(А) Проверяем условия коммутации магнитного пускателя: Iн.пуск. ≥ I пуск.дв./6, где I пуск.дв – пусковой ток двигателя I пуск.дв. = Iн*Ki/6 = 4,9*7/6 = 5,7 (А), где Ki – кратность пускового тока (таблица №2) Как видно условие проверки выполняется Iн.пуск. ≥ I пуск.дв./6., 10(А) ≥ 5,7(А). Руководствуясь номинальным током пускателя Iн.пуск, из Каталога указанного в литературе, выбираем тепловое реле РТИ 1310 с номинальным током Iн.т.р. = 6,0 (А) и пределом регулирования силы тока несрабатывания 4…6 (А) Выбор сигнальной аппаратуры (светодиоды, звонки, резисторы, диоды) Выбор сигнальной аппаратуры осуществляется в следующей последовательности: 1. Для звуковой сигнализации выбираем звуковой аппарат из Каталога указанного в литературе, руководствуясь номинальным напряжением Uн. В нашем случае Uн = 220 (В), значит выбираем звонок ЗВП-220. 2. Составляем схему включения светодиода 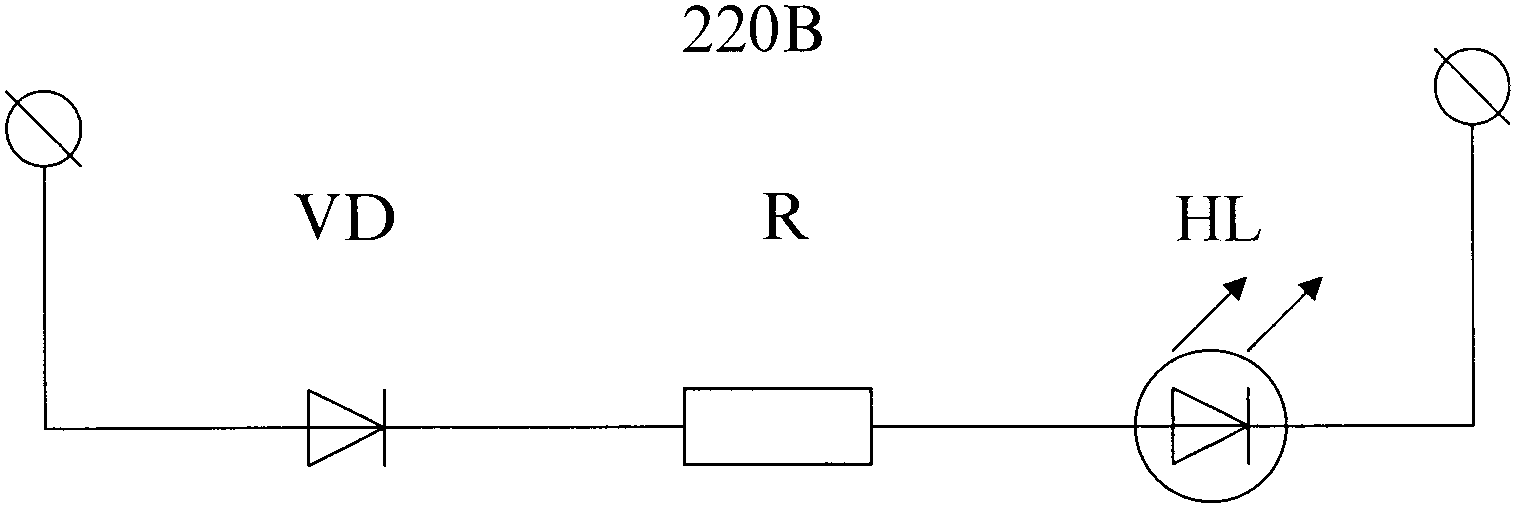 Рис.1 Схема подключения светодиода 3. Выбираем светодиод из приложения №8 В нашем случае выбираем светодиод 3Л360А с Iдоп = 10 (мА) = 0,01 (А) и Uобр.сд.. = 1,7 (В) 4. Выбираем диод из приложения №9 В нашем случае выбираем диод Д226Б с Iср = 300 (мА) = 0,3 (А) и Uобр.д = 400 (В) 5 Выбираем резистор Рассчитываем напряжение резистора Uр = 0,45*220 = 100 (В) Рассчитываем сопротивление резистора: R = Uр - Uобр.сд. = 100 – 1,7 = 9830 (Ом) Iдоп 0,01 Рассчитываем мощность резистора: Р = I2доп * R = 0,012 * 9830 = 0,983 (Вт) Выбираем резистор из приложения №10, исходя из рассчитанного сопротивления R и мощности Р. В нашем случае выбираем резистор МЛТ-1, с Рном = 1 (Вт) и R = 10 МОм. Выбор реле времени Выбор реле времени осуществляется из Каталога указанного в литературе, по номинальному напряжению Uн и наличия необходимых для схемы управления контактов. В нашем случае реле обеспечивает последовательный пуск двигателей горизонтального и вертикального навозоуборочного транспортера с выдержкой времени, достаточной для полного освобождения транспортеров от навоза. Для осуществления этой функции на необходим один разомкнутый и один замкнутый контакт. Выбираем реле ЭВ-200 с выдержкой времени 0,1…20 секунд, Uн = 220 (В) и током, проходящим через контакты Iр.в = 5(А). Выбор кнопок управления Для использования в качестве кнопки управления «ПУСК» применяем кнопку управления AELA 22 «Грибок» d 22 мм неон/230 В. Для использования в качестве кнопки управления «СТОП» применяем кнопку управления ANE 22 «Грибок» с фиксацией d 22 мм неон/230 В. Выбор конечных выключателей Выбор конечных выключателей осуществляется из Каталога указанного в литературе, исходя из условий экономичности. В нашем случае выбираем конечный выключатель ВПК-2110 – БУ2, с Iк.в=10(А) и Uн = 690 (В) 7.Расчет освещения и выбор защитной аппаратуры. Расчет и выбор элементов освещения производим исходя из габаритов помещения, которое указано в задании, следующим образом:  Рис. План коровника для выращивания и откорма 100 голов год (для подсобных хозяйств): Собираем данные для расчета: Параметры помещения (указаны в задании): А = 96(м) – длина помещения, В = 12 (м) – ширина помещения, Н = 3 (м) – высота помещения. Тип источника света: светодиодные лампы. Тип помещения: свинарник Минимальная освещенность: Еmin = 70 (Лк) Выполняем собственно расчет и выбор элементов освещения: а) Выбираем тип светильника из Каталога указанного в литературе В нашем случае выбираем светильник ДСП б) Определяем расчетную высоту: Нр = Н – hсв – hн, где Н – высота вашего помещения. hсв = 0,3 (м) – высота свеса светильника от потолка до средней точки hн = 1,5…2,5 (м) рабочее расстояние от пола до освещенной поверхности В нашем случае расчетная высота будет равна: Нр = Н – hсв – hн = 3 – 0,3 – 1= 1,7 (м) в) Определяем оптимальное расстояние между светильниками: Lопт = λопт * Нр, где λопт – оптимальное отношение рассеивающей поверхности (приложение №16), Нр – расчетная высота В нашем случае оптимальное расстояние между светильниками будет равно: Lопт = λопт * Нр = 1,3 * 1,7 = 2,21 (м). Принимаем Lопт = 2,5 (м). г) Определяем расстояние от стены до крайнего светильника: Lст = (0,4÷0,5)*Lопт В нашем случае расстояние от стены до крайнего светильника будет равно: Lст = (0,4÷0,5)*Lопт = 0,5 * 2 = 1 (м) д) Определяем количество светильником в одном ряду m = А – 2 * Lст, где Lопт А – длина помещения В нашем случае количество светильников в одном ряду равно: m = А – 2 * Lст = 96 – 2 * 1 = 37(шт.) Lопт 2,5 е) Определяем количество рядов n = В – 2 * Lст, где В – ширина помещения Lопт В нашем случае количество рядов равно: n = В – 2 * Lст = 12 – 2 * 1 = 4 Lопт 2,5 ж) Определяем общее количество светильников N = m * n В нашем случае общее количество светильников равно: N = m * n = 37 * 4 = 148 (шт.) з) Принимаем значение коэффициентов отражения стен, пола и потолка: Рст = 70% Рп = 50% Рр.п = 30% и) Определяем индекс помещения i = А*В . Нр*(А+В) В нашем случае индекс помещения будет равен: i = А*В = 96 * 12 = 6,27 Нр*(А+В) 1,7*(96+12) к) Используя индекс помещения, из Каталога указанного в литературе определяем коэффициент светового потока ŋ/100 В нашем случае принимаем ŋ = 0,8 л) Определяем расчетный световой поток Фр = Еmin*S*k*Z , где N*ŋ Еmin – минимальное освещение, S – площадь вашего помещения, k – коэффициент запаса (приложение №18) Z – коэффициент неравномерности освещения(Каталога указанного в литературе). В нашем случае расчетный световой поток равен: Фр = Еmin*S*k*Z N*ŋ S = A * B = 96 * 12 = 1152 (м2) Фр = 70*1152*1,8*1,1 = 1348,5 (Лм) 148*0,8 наш осветительный прибор ДСП 1304Д создает световой поток Фоп = 1440 (Лм) м) Определяем фактическое значение освещенности Еф = Фоп * N * ŋ /(k*S*Z) = 1440 * 148 * 0,8 / (1,8*1152*1,1) = 74,7 (Лк) Разница между фактической и минимальной освещенностью составляем +4,7 (Лк) или + 6,7 %, что не превышает допустимого отклонения +20% л) Определяем мощность осветительной установки Ру = Роп*N = 18*148 = 2610(Вт) Получили весьма экономичную установку. каталог указан в литературе,исходя из количества групп (рядов) светильников выбираем корпус модульный пластиковый КМПн, IP55 с одним рядом для установки 5 модулей. Производим расчет номинального тока расцепителя автоматического выключателя на вводе. Iн = ∑Ру= 2610 = 7 (А) √3*Uл 1,73*220 Выбираем автоматический выключатель ВА47-29 с Iном.р. = 10(А) Производим расчет номинального тока расцепителя автоматического выключателя на группу (ряд). Iн = ∑Ргр Uф где ∑Ргр – суммарная мощность всех осветительных приборов одной группы (ряда) ∑Ргр = n*Роп = 37*18 = 666 (Вт) Iн = ∑Ргр = 666..= 3 (А) Uф 220 Выбираем автоматический выключатель ВА47-29с Iном.р. = 4 (А) 8.Расчет и выбор марки сечения проводов, способ их прокладки Расчет и выбор марки сечения проводов и способов их прокладки производим в следующем порядке: Выбираем марку и сечение провода для двигателя скребкового транспортера АИР 100 L4P3 с Рн = 4 (кВт), Iн = 15,1(А), ki=7,0 в следующей последовательности: 1) На основании условий окружающей среды выбираем провод, пользуясь Каталога указанного в литературе. В нашем случае выбираем провод марки ПВ, проложенный в трубе. 2) По условию допустимого нагрева Iдоп ≥ Iн выбираем сечение провода, пользуясь Каталога указанного в литературе. В нашем случае выбираем сечение провода 4 мм2 с Iдоп = 35 (А). 3) Проверяем сечение провода по условию соответствия аппаратуре защиты. В нашем случае, в качестве аппарата защиты применяется автоматический выключатель ВА51Г25 с номинальным током расцепителя Iном. р.= 25(А) Проверку выполняем по условию: Iдоп ≥ Кз * Iном.р, где Кз – кратность допустимого тока для проводов и кабелей (во всех случаях принимаем Кз = 1). Iдоп ≥ 1*25 35 ≥ 25 Условия проверки выполняются, значит окончательно выбираем провод марки ПВ 3(1*4) с Iдоп = 35 (А). Для остальных двигателей расчет и выбор марки сечения проводов и способов их прокладки производим аналогично. Выбор силовой сборки и пульта управления Выбираем шкаф серии ПР8804 навесного исполнения с автоматическим выключателем серии ВА51Г259.Составление перечня элементов схемы автоматизацииВсе ранее выбранные элементы схемы автоматизации сводим в одну таблицу.
Заключение Цель курсовой работы была изучить автоматизацию технологической линии скребкового навозоуборочного транспортера TCH-160.Изучив установку и технологическую линию я изменил двигатели, марку сечения проводу, пульт управления и силовую сборку на более мощные и надежные, что делает установку более надежной. На ферме где расположена установка TCH-160 я заменил лампы на светодиоды, т.к. они более надежны и расходуют меньше электрической энергии, что делает схему сигнализации более экономичной. В результате изменений технологической линии скребкового навозоуборочного транспортера линия стала наиболее надежной и экономичной. Литература Акимова Н.А., Н.Ф. Котеленец, Н.И. Монтаж, техническая эксплуатация и ремонт электрического и электромеханического оборудования, Москва Мастерство, 2001г., 256 с. Бородин И.Ф. Технические средства автоматики. - М.: Колос, 1982. - 303с. Бородин И.Ф., Рысс А.А. Автоматизация технологических процессов. - М.: Колос, 1996. - 351с Варшавский А.С., Л.В.Волкова. Бытовые нагревательные приборы Энергоиздат 1981г., 335с. Грундулек А.О. Защита электродвигателей в сельском хозяйстве. - М.: Колос, 1982. - 104с. Живописцев Е.Н., Косицин О.А. Электротехнология и электрическоеосвешение. - М.: Агропромиздат, 1990. - 303с. Каганов И.Л. Курсовое и дипломное проектирование, Агропромиздат , 1990, 362 с. Квятковский С.Ф. Бытовые нагревательные электроприборы, Энергоатомиздат, 2001г., 112 с. Куликов А.С.. Учебник по черчению., Высшая школа, 2007г., 150с https://studopedia.net/12_90718_konstruktsiya-izmelchitelya-iks-m.html https://c-stud.ru/work_html/look_full.html?id=201385&razdel=4843 http://gardenweb.ru/kak-ustroeny-elektrifitsirovannye-mashiny-dlya-moiki-i-rezki-sochnykh-kormov-v-chastnosti-korneklubneplodov https://lektsii.org/15-53403.html https://www.iek.ru/products/catalog/ (Каталог iek за 2019 годэлектрическая продукция) https://www.пишем-диплом-сами.рф/vvedenie-kursovoi-raboty-primery https://infopedia.su/10x3f38.html | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||