курсовой по наладке. Рома курсовой3. Проектирование и расчет управляемого преобразователя автоматизированного электропривода пояснительная записка
 Скачать 0.64 Mb. Скачать 0.64 Mb.
|

 УПРАВЛЕНИЕ ОБРАЗОВАНИЯ ГРОДНЕНСКОГО ОБЛИСПОЛКОМА УПРАВЛЕНИЕ ОБРАЗОВАНИЯ ГРОДНЕНСКОГО ОБЛИСПОЛКОМАУЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ «ГРОДНЕНСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ» Специальность: 2-53 01 05 «Автоматизированные электроприводы» Специализация: 2-53 01 05.01«Автоматизированные электроприводы промышленных и транспортных установок» Группа: АЭП - 30 КУРСОВОЙ ПРОЕКТ по дисциплине: «Силовая преобразовательная техника» на тему: «Проектирование и расчет управляемого преобразователя автоматизированного электропривода» ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Разработал Зайковский Р.А. Руководитель проекта Сурба Н. В. 2020  СОДЕРЖАНИЕ СОДЕРЖАНИЕВведение………………………………………………………………………….....3 Литературный обзор системы управления СПП……..………………………5 Проектирование силовой схемы преобразователя…………………..............7 Расчет параметров и выбор СПП...……………………………………………8 Выбор силовых тиристоров…………………………………………………..8 Выбор анодного реактора……………………………………...………….....10 Выбор сглаживающего дроселя..………………………………………….....11 Расчет и выбор элементов защиты СПП.………………………..…..............14 Проектирование структурной схемы СИФУ………………………………....15 Выбор функциональной схемы электропривода……………………….........18 Проектирование электрической принципиальной схемы блока электро-привода…………………………………………………………………..…………20 Заключение………………………………………………………….………...........21 Литература………………………………………………………………................22 Введение  Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта. Силовой преобразователь - элемент, при помощи которого оказывается регулирующее воздействие на электропривод. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET - metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT - Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей - на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). В последние годы в связи со значительным прогрессом в создании быстродействующих силовых приборов наметилась тенденция к созданию более совершенных топологий преобразователей тока. К таким топологиям, в первую очередь, относятся матричные и гибридные структуры. Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). 1 ЛИТЕРАТУРНЫЙ ОБЗОР  СИСТЕМЫ УПРАВЛЕНИЯ СПП СИСТЕМЫ УПРАВЛЕНИЯ СППСистема импульсно-фазового управления (СИФУ) предназначена для управления силовыми тиристорами и выполняет следующие функции: 1) Определение момента времени, в которые должны открываться те или иные конкретные тиристоры. Эти моменты времени задаются сигналом управления, который поступает с выхода системы автоматического управления на вход СИФУ. 2) Формирование открывающих импульсов, которые передаются в нужные моменты времени на управляющие электроды тиристоров и имеющих требуемые амплитуды, мощность и длительность. По способу получения сдвига относительно точки естественного открывания различают горизонтальный, вертикальный и интегрирующий принцип управления. В одноканальных многофазных СИФУ генератор переменого напряжения работает с частотой в m раз больше частоты питающей сети, что требует в дальнейшем распределения управляющих импульсов по m каналам. Одноканальная СИФУ для трехфазного нулевого или полууправляемого мостового выпрямителя работает следующим образом. Генератор пилообразного напряжения ГПН запускается в момент появления на тиристорах прямого напряжения, т.е. в точках естественного отпирания. Запуск ГПН обеспечивается синхронизатором С. С выхода ГПН пилообразное напряжение подается на пороговое устройство (ПУ), которое срабатывает при достижении пилообразным напряжением порогового значения. Напряжение с выхода ПУ через дифференцирующую цепь (ДЦ) поступает на схемы совпадения (СС), куда подается соответствующий импульс с синхронизатора. При совпадении импульсов с выхода синхронизатора и дифференцирующей цепи один из выходных каскадов (ВК) вырабатывает управляющий импульс на отпирание тиристора соответствующей фазы. Кроме того, одноканальная система проста в настройке, поскольку не требуется создание нескольких идентичных каналов. К недостаткам одноканальных синхронных систем управления следует отнести сложность синхронизации с сетью, так как необходимо формировать одноканальную последовательность кратной частоты.Вертикальный метод управляения: 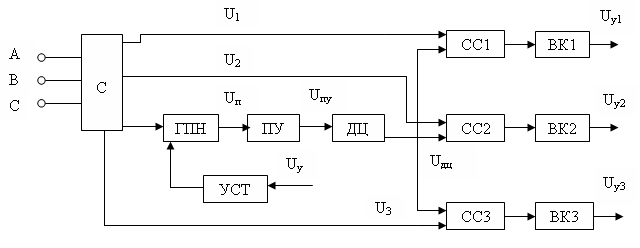 Рисунок 1 – функциональная схема СИФУ  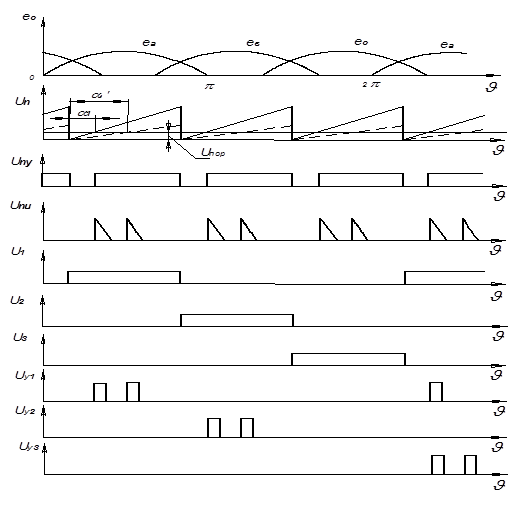 Рисунок 2 – диаграмма работы СИФУ  2 ПРОЕКТИРОВАНИЕ СИЛОВОЙ СХЕМЫ ПРЕОБРАЗОВАТЕЛЯ Для определения вида силовой схемы преобразователя проанализируем данные к курсовой работе. Привод осуществляется двигателем постоянного тока с номинальным напряжением 440 В. Мощность двигателя 18.5 кВт и поэтому оправдано применение трёхфазной мостовой схемы выпрямления . Таблица 1 – Технические данные двигателя марки 2ПФ225LУХЛ4
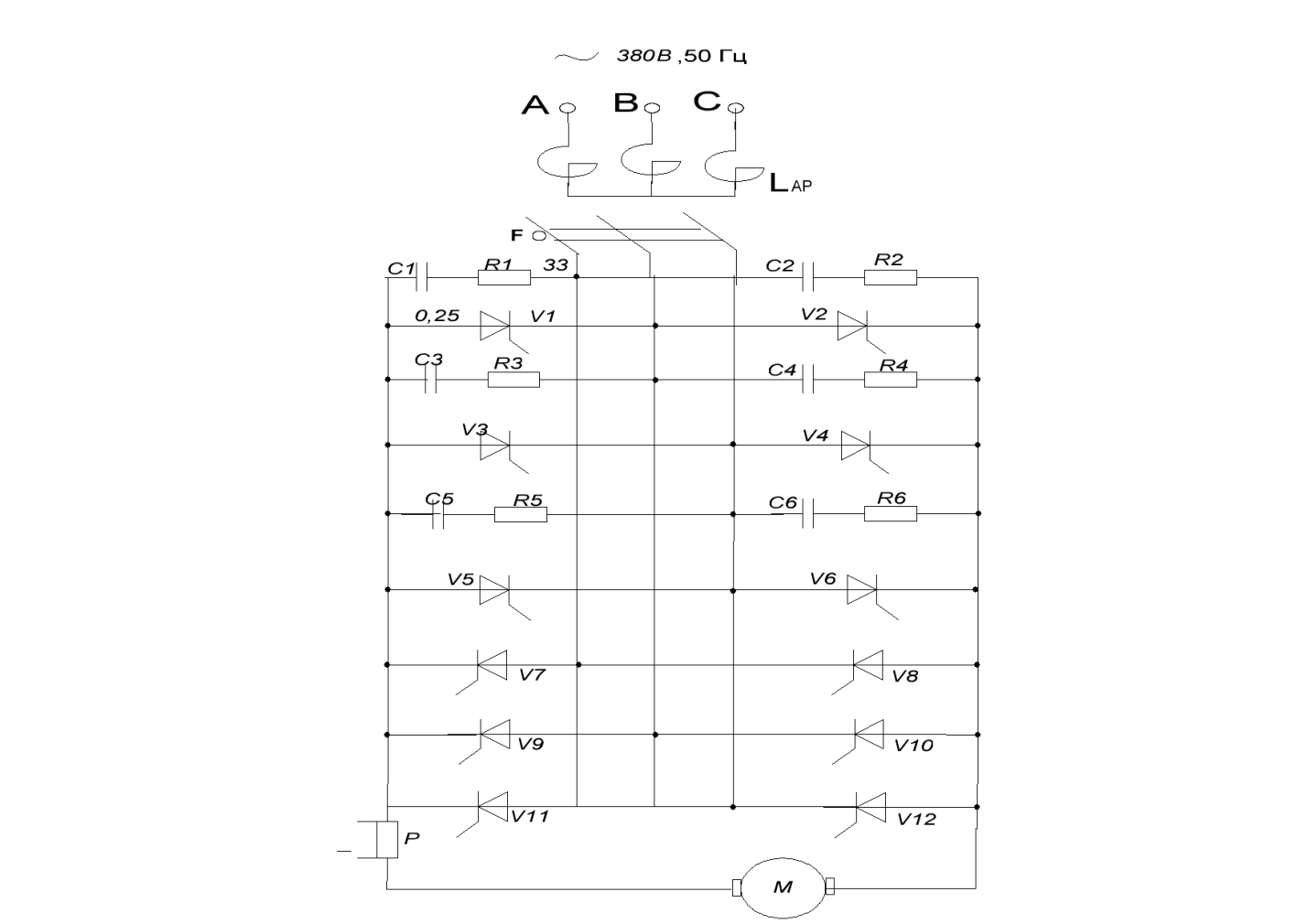 Рисуно  к 3 – Cхема силовой части электропривода к 3 – Cхема силовой части электропривода 3. РАСЧЁТ ПАРАМЕТРОВ И ВЫБОР СИЛОВЫХ ЭЛЕМЕНТОВ 3.1Выбор силовых тиристоров В  ыбор тиристоров производиться по предельному значению тока протекающего через вентиль и максимальному значению обратного напряжения с учетом условий охлаждения вентиля и отличия формы тока от синусоидальной. ыбор тиристоров производиться по предельному значению тока протекающего через вентиль и максимальному значению обратного напряжения с учетом условий охлаждения вентиля и отличия формы тока от синусоидальной.Выбор тиристоров осуществляется в следующей последовательности: Определим класс вентиля по напряжению:  , (1) , (1)где Кзи – коэффициент запаса по рабочему напряжению; Кзи=1,7; Uм – максимальное значение рабочего напряжения прикладываемого к вентилю. Максимальное значение рабочего напряжения прикладываемого к вентилю определяется:  , (2) , (2)где Uмн – Номинальное значение Uм; Kc – коэффициент учитывающий возможное повышение напряжения в сети; Kc=1,1.  . (3) . (3)По формуле (11) определим максимальное значение рабочего напряжения прикладываемого к вентилю:  (4) (4)Таким образом  (12 класс) (12 класс)Определим средний расчётный ток вентиля:  . (5) . (5)Найдём действующее значение тока:  . (6) . (6)Коэффициент формы тока будет равен:  . (7) . (7)Далее выбираем тиристоры по условию:  , (8) , (8)где Кзо – коэффициент запаса по охлаждению; Кзо = 1; Кзрi – коэффициент запаса по рабочему току; Кзрi = 1,55.  (9) (9)По каталогу выбираем вентиль Т142-80 и охладитель О241-80, выбираем данные для вентиля. Таблица 2 – Параметры тиристора Т142-80 с охладителем О241-80
 , (10) , (10)где rt – порогово  е сопротивление прямой ветви прибора; е сопротивление прямой ветви прибора;Uт(то) – пороговое напряжение прямой ветви прибора; Tjm – предельно допустимая температура структуры; Ta – температура окружающей среды; Rthja – тепловое сопротивление переход – среда; Rthja = Rthjc + Rthch + Rthha, (11) где Rthjc – тепловое сопротивление корпус;  Rthch – тепловое сопротивление корпус –контактная поверхность охладителя; Rthch – тепловое сопротивление корпус –контактная поверхность охладителя;Rthha – тепловое сопротивление тепловой охладитель – окружающая среда. По формуле (17) найдем тепловое сопротивление переход – среда: Rthja = 0,30 + 2,1 + 0,15 = 2,55 C/Вт. По формуле (14) находим максимальный допустимый ток в открытом состоянии:  . .Так как выполняется неравенство I*TAVm ≥ ITAVm, (27,696  26,174), то данный тиристор подходит для использования в рассчитываемом преобразователе. Требуемое значение индуктивности анодного реактора для ограничения тока короткого замыкания на уровне ударного: 26,174), то данный тиристор подходит для использования в рассчитываемом преобразователе. Требуемое значение индуктивности анодного реактора для ограничения тока короткого замыкания на уровне ударного:3.2 Выбор анодного реактора LAP  = = =0,067=0,8 Гн =0,067=0,8 ГнIуд – ударный ток, который может протекать по прибору в течении 10мс; Где Кп – коэффициент, учитывающий наличие свободной составляющей в токе короткого замыкания; Кп = 2 n – количество реакторов, ограничивающих ток короткого замыкания. Анодный реактор выбирается из каталога. Выбираем реактор ДФ-7 Таблица 3-Технические данные реакторов ДФ
Рассчитываем сопротивление анодного реактора: RAP  (25) (25)RAP =  = 0,0097 Ом = 0,0097 Ом 3.3 Выбор сглаживающего дросселя 3.3 Выбор сглаживающего дросселяДля уменьшения пульсаций тока и ограничения зоны прерывистых токов в главной цепи двигателя применяют дополнительный сглаживающий дроссель . Однако,с целью экономии,стремятся обойтись без сглаживающего дросселя применяя многофункциональные схемы выпрямления и двигатели, предназначенные для работы от вентильных преобразователей. При этом двигатели должны иметь достаточно большую индуктивность якоря (избегают применения компенсационных обмоток), для чего полюсы и статор в целом выполняются шехтованными. Определим требуемую постоянную времени электрической цепи, исходя из условий ограничения зоны прерывистого тока.  , (13) , (13)где Кгр – постоянный коэффициент схемы выпрямления. Для трехфазной мосто- вой схемы Кгр = 2,9  ; ;iгр.мах – максимальное значение относительного граничного тока зоны прерывистого тока:  , (14) , (14)где Iгр.мах – абсолютное наибольшее значение граничного тока, которое должнобыть меньше тока холостого хода.  А. (15) А. (15)IБ – базовое значение тока:  , (16) , (16)где Rп – активное сопротивление якорной цепи в граничном режиме (в режиме прерывистого тока): Rп = Rя + 2  Rтр + Rсп, (17) Rтр + Rсп, (17) где Rя – сопротивление якоря двигателя; Rтр – активное сопротивление фазы трансформатора; Rсп – активное сопротивление силового преобразователя, учитывающее падение напряжения на вентилях и проводах.  , (18) , (18)где ∆Uв – прямое падение напряжения на вентилях; ∆Uв=2; n – число последовательно включённых вентилей проводящих ток в один и тот-же момент времени; n=2. ITAV=Iвср. По формуле (23) определим активное сопротивление силового преобразователя:  (19) (19)По  формуле (22) определяем активное сопротивление якорной цепи в граничном режиме: формуле (22) определяем активное сопротивление якорной цепи в граничном режиме: . (20) . (20)Определив активное сопротивление якорной цепи в граничном режиме, по формуле (22) определяем базовое значение тока:  (21) (21)Определяем максимальное значение относительного граничного тока зоны прерывистого тока:  (22) (22)Исходя из данных условий, и найденных значений, находим требуемое постоянное времени электрической цепи:  (23) (23)Далее определяется требуемая индуктивность якорной цепи и требуемая индуктивность сглаживающего дросселя:  Гн. (24) Гн. (24)  , (25) , (25)где Lя – индуктивность якоря двигателя.  (26) (26)  Т.к индуктивность дросселя отрицательная, следовательно, в схеме он не нужен. 4. РАСЧЕТ И ВЫБОР ЭЛЕМЕНТОВ ПАССИВНОЙ ЗАЩИТЫ СПП 4.1 Расчёт и выбор защитных RC-цепочек Защитные RC цепочки предназначенные для ограничения скорости нарастания напряжения и снижения перенапряжения на вентилях схемы. Точный расчет RC цепей достаточно сложен и требует учета ряда факторов и применение вычислительной техники. Определим значения сопротивления и ёмкости для RC цепочек: Расчет ёмкости конденсатора производиться в следующей последовательности:  (27) (27) Далее определяем сопротивление резистора:  (28) (28)Исходя из полученных значений выбираем конденсатор по ёмкости и резистор по сопротивлению и получаем конденсатор марки КС73-17, ёмкостью 1100 мкФ  металлопленочный, а также резистор марки МF-25(C2-23) со значением сопротивления равным R=110 Ом, металлопленочный металлопленочный, а также резистор марки МF-25(C2-23) со значением сопротивления равным R=110 Ом, металлопленочный5 ПРОЕКТИРОВАНИЕ СТРУКТУРНОЙ СХЕМЫ СИФУ На  основании сформулированных требований к системе импульсно фазового управления и спроектированной силовой схемы преобразователя выбрана система импульсно – фазового управления. основании сформулированных требований к системе импульсно фазового управления и спроектированной силовой схемы преобразователя выбрана система импульсно – фазового управления.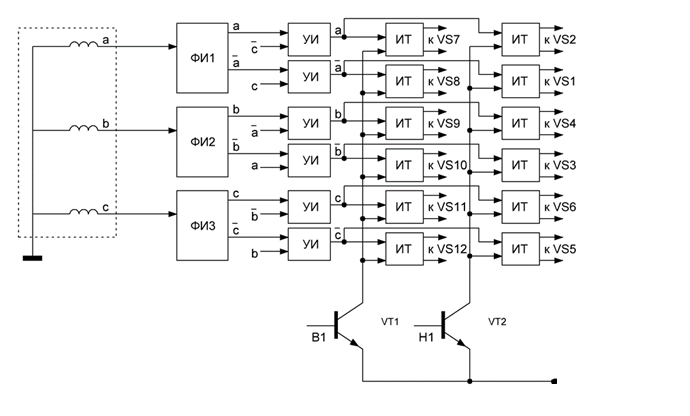 Рисунок 4 – Структурная схема СИФУ Система импульсно-фазового управления – формирует для управления тиристорами сдвоенные прямоугольные импульсы, которых относительно силового напряжения на тиристорах изменяется пропорционально напряжению, поступающему на управляющий орган СИФУ. Схема включает в себя следующие узлы: - Источник синхронизующего напряжения (ИСН) - Три идентичных формирователя импульсов (ФИ) - Шесть усилительных импульсов (УИ) - Двенадцать импульсных трансформаторов (ИТ) В качестве ИСН используется вторичная обмотка трансформатора TV1 питания в синхронизации преобразователя. При соединении силового трансформатора по схеме Y/Y напряжение синхронизации совпадают по фазе с силовым напряжениями одновременных фаз на тиристорах. Каждый ФИ синхронизован со своей фазой и формирует  импульсы управления двумя противофазными тиристорами этой фазы, т.е импульсы противофазных каналов каждого ФИ сдвинуты друг относительно друга на 180 эл. градусов , а импульсы одноимённых каналов разных ФИ сдвинуты друг относительно друга на 120 эл. градусов. импульсы управления двумя противофазными тиристорами этой фазы, т.е импульсы противофазных каналов каждого ФИ сдвинуты друг относительно друга на 180 эл. градусов , а импульсы одноимённых каналов разных ФИ сдвинуты друг относительно друга на 120 эл. градусов.На усилителях импульсов, кроме усиления по мощности, осуществляется сдваивание импульсов для управления тиристорами. Для этого на второй вход УИ заводятся импульсы с того канала формирователей импульсов, где имеется отставание их на60 эл.градусов от импульсов на первом входе УИ .Сдвоенные импульсы с выхода каждого УИ поступают одновременно на два ИТ , принадлежащих разным комплектам тиристоров. Фильтр осуществляет сдвиг синхронизующего напряжения на угол 30 эл.- градусов, совмещая тем самым начало зоны разрешения выдачи импульса на ти- ристор с точкой естественной коммутации силового напряжения на тиристорах . Выходное напряжение фильтра с помощью пороговых элементов преобразуется в две противофазные последовательности прямоугольных импульсов. Величина порога (зоны нечувствительности) определяется падением напряжения на переходах база — эмиттер транзисров . Длительность импульса единичного уровня (около 176 эл. град) определяет зону разрешения выдачи управляющих импульсов на соответствующий тиристор.В промежуток времени перекрытия импульсов нулевого уровня на входах и на выходе формируется синхроимпульс единичного уровня длительностью около 8 эл.град.Этот импульс открывает транзистор , осуществляющий разряд интегрирующей емкости до нулевого напряжения. 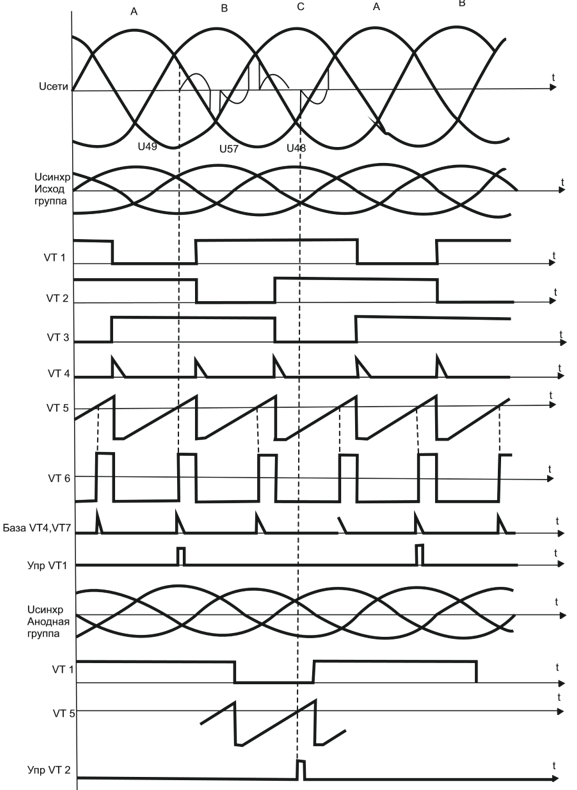 Р  исунок 5 – Временные диаграммы напряжений СИФУ исунок 5 – Временные диаграммы напряжений СИФУ 6 ВЫБОР ФУНКЦИОНАЛЬНОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА 6 ВЫБОР ФУНКЦИОНАЛЬНОЙ СХЕМЫ ЭЛЕКТРОПРИВОДАНа основании выбранного ЭД с проектированной системой управления выбран электропривод типа “БТУ3601”. Электропривод предназначен для регулирования скорости вращения как обычных двигателей постоянного тока с независимым возбуждением, так и высокомоментных электродвигателей. Электрическая функциональная схема электропривода представлена в графической части листа 1. Силовая часть преобразователя состоит из двух трехфазных. мостовых комплектов тиристоров, работающих по принципу раздельного управления. Подключение преобразователя к силовой сети производится через анодные реакторы. Управление скоростью вращения осуществляется двухконтурной системой автоматического регулированиях ПИ-регуляторами тока и скорости. Для линеаризации регулировочной характеристики преобразователя в зонах прерывистого и непрерывного токов используется нелинейное звено с сигналом положительной обратной связи по ЭДС двигателя. Для повышения термостабильности и увеличения'диапазона регулирования электропривода применяется предварительный усилитель регулятора скорости, выполненный по схеме модулятор — усилитель — демодулятор. Предусмотрены защитные RC-цепочки от коммутационных перенапряжений. Встроенный электромагнитный тормоз предназначен только для работы в аварийных ситуациях. Регулятор скорости предназначен для измерения скорости вращения вала двигателя в соответствии с требованием технологического процесса. Регулятор скорости выполнен в виде пропорционально-интегрального регулятора и реализован на операционном усилителе. Регулятор тока формирует напряжение, пропорциональное разности сигналов задания на ток и отрицательной обратной связи по току. Нелинейное звено суммирует выходное напряжение регулятора тока. пропорциональное току двигателя, и напряжение Uе обратной связи по ЭДС с разными коэффициентами передачи. Система импульсно-фазового управления предназначена для формирования и синхронизации подачи управляющих импульсов на силовые тиристоры. Управляющий орган СИФУ обеспечивает ограничение минимального и максимального углов регулирования, установку начального угла регулирования. Логическое устройство раздельного управления служит для формирования сигналов кл. В и кл. Н, управляющих ключами В и Н в датчике тока, переключателе характеристик и цепи импульсных трансформаторов Предусмотрена защита от перегрузок по току, защита от длительных перегрузок, защита от превышения максимальной частоты вращения, защита от неправильного подключения.   7 ПРОЕКТИРОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ БЛОКА РЕГКЛЯТОР СКОРОСТИ 7 ПРОЕКТИРОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ БЛОКА РЕГКЛЯТОР СКОРОСТИРегулятор скорости предназначен для измерения скорости вращения вала двигателя в соответствии с требованием технологического процесса . Регулятор скорости представляет собой пропорционально-интегральный (ПИ) регулятор и выполнен на операционном усилителе DA1. Блок регулятора скорости представлен в графической части листа 2. В зависимости от диапазона регулирования электропривода PC имеет различную схемную реализацию. Рассмотрим принципиальную схему PC для диапазона регулирования 1:10000. Характерной особенностью исполнения в этом случае является наличие предварительного усилителя PC , выполненного по схеме модулятор-усилитель -демодулятор.Элементами, определяющими ПИ-характеристику регулятора скорости, являются сопротивление R8 и конденсатор C.Резисторы R5, R13 , конденсатор C5 не устанавливаются . Между лепестками 2-3 ставится перемичка, включающая в обратную связь операционного усилителя DА1 конденсатор С4.Полученное интегрирующее звено используется в качестве фильтра выходного сигнала ПУРС. Масштаб скорости подбирается сменным резистором R4. Для плавной регулировки задания на ток якоря используется делитель на резисторах R14 , RP2 . В режиме токоограничения выходное напряжение усилителя DА1 достигает уровня насыщения . При напряжении питания ±15 В напряжение насыщения усилителя имеет величину около ±12,5 В . Изменяя RP2 , можно регулировать выходное напряжение PC в режиме насыщения от 0 до 10 вольт. В приводе предусмотрен режим внешнего уменьшения уставки ограничения тока путем параллельного подключения к резисторуRP2 дополнительного со-противления. При использовании в комплекте с преобразователем высокомоментных электродвигателей ограничение тока осуществляется УЗТ, подключенным параллельно резистору RP2. Заключение  В ходе курсового проектирования был спроектирован силовой преобразователь автоматизированного электропривода “БТУ3601”. Так же был осуществлен литературный обзор систем управления силовыми полупроводниковыми приборами, рассчитаны параметры и выбраны силовые элементы преобразователя (силовой тиристор Т142-80 с охладителем О241-80, сглаживающий дроссель ДФ-7-60-80 ), аналогично были рассчитаны и выбраны элементы пассивной защиты силовых полупроводниковых приборов(резистор MF-25(C2-23) и конденсатор К73-17). Далее была спроектирована схема системы управления СПП электропривода, выбрана функциональная схема электропривода и спроектирована электрическая принципиальная схема блока регулятора электропривода. . Литература 1. ГОСТ 2.105-95 ЕСКД. Общие требования к текстовым документам. 2. ГОСТ 2.702-11. Правила выполнения электрических схем. 3. Алиев, И.И. Справочник по электротехнике и электрооборудованию / И.И. Алиев. М.: Высшая школа,2000. 4. Анхимюк В.Л. Теория автоматического управления / В.Л. Анхимюк : Дизайн ПРО, 2002. 5. Разанов Ю.Н. Силовая преобразовательная техника / Ю.Н. Разанов,1989. 6. Чебовский О.Г. Справочник Силовые полупроводниковые приборы / О.Г. Чебовский 1998 7. Фираго Б.И. Расчеты по электроприводу производственных машин и механизмов / Б.И. Фираго. Техноперспектива 2012. 8. http://estudiant.ru/technical 9. http://studbooks.net   | |||||||||||||||||||||||||||||||||||||||||||||||||||