ДООП Робототехника. ДОП Робототехника. Протокол от 2022 г. Криничанская оош
 Скачать 242.93 Kb. Скачать 242.93 Kb.
|

Методическое оснащение программы
Список используемой литературы. Для педагога: Каширин. Д.А Основы робототехники VEX IQ. Учебно-методическое пособие для учителя. ФГОС/ Д.А. Каширин, Н.Д. Федорова. – М : Издательство «Экзамен», 2016.-136 с. Ермишин К.В. «Методические рекомендации для преподавателя: образовательный робототехнический модуль (базовый уровень): 12-15 лет», М: Издательство «Экзамен», 2015. Горнов О.А. «Основы робототехники и программирование с VEX EDR», М: Издательство «Экзамен», 2016. Для учащихся (учащихся и родителей): Каширин. Д.А Основы робототехники VEX IQ. Учебно- методическое пособие для учителя. ФГОС/ Д.А. Каширин, Н.Д. Федорова. – М : Издательство «Экзамен», 2016.-184 с. Мацаль И.И. Основы робототехники VEX IQ. Учебно-методическоепособие для учителя. ФГОС/ И.И Мацаль, А.А. Нагорный . – М : Издательство «Экзамен», 2016.-144 с. Каширин Д.А., Федорова Н.Д. «Основы робототехники VEX IQ. Учебное пособие для учителя. ФГОС, М: Издательство «Экзамен», 2016 Л.Л. Босова «Информатика. Учебник для 6 класса», М: Бином, 2017 Л.Л. Босова «Информатика. Учебник для 7 класса», М: Бином, 2016 Л.Л. Босова «Информатика. Учебник для 8 класса», М: Бином, 2018 Интернет ресурсыhttp://www.vexiq.com – сайт VEX IQ. http://www.vexiq.com/curriculum - учебные материалы VEX IQ. http://vex.examen-technolab.ru/build-instructions_iq - инструкции по сборке VEX IQ. http://www.youtube.com/user/vexroboticstv - видео VEX IQ. http://www.vexiqforum.com – форум VEX IQ. http://vex.examen-technolab.ru/vexiq/obnovlenie_po - обновление VEX IQ(прошивка). http://vex.examen-technolab.ru/programmnoe_obespechenie_iq - информация по программному обеспечению VEX IQ. http://vex.examen-technolab.ru – VEX Robotics в России. Приложение№2 Оценочные материалы Тест №1.Для обмена данными между NXT или EV3 блоком и компьютером используется… a.Wi-Fi b.PCI порт c.WiMAX d.USB порт Блок NXT имеет…a.3 выходных и 4 входных порта b.4 выходных и 3 входных порта Установите соответствие. Датчик касания Ультразвуковой датчик Датчик цвета Блок EV3 имеет…a.4 выходных и 4 входных порта b.5 входных и 5 выходных порта
a.Датчик касания b.Ультразвуковой датчик c.Датчик цвета d.Датчик звука Сервомотор – это…a.устройство для определения цвета b.устройство для проигрывания звука c.устройство для движения робота d.устройство для хранения данных
к одному из выходных портов оставить свободным к одному из входных к аккумулятору Установите соответствие. сервомотор EV3 средний сервомотор EV3 сервомотор NXT Какое робототехническое понятие зашифровано в ребусе?  ОТВЕТ:
к одному из выходных портов оставить свободным к одному из входных к аккумулятору Полный привод – это…a.Конструкция на четырех колесах и дополнительной гусеницей. b.Конструкция позволяющая организовать движение во все стороны. c.Конструкция, имеющая максимальное количество степеней свободы. d.Конструкция, позволяющая передавать вращение, создаваемое двигателем, на все колеса. Отгадайте ребус ОТВЕТ: 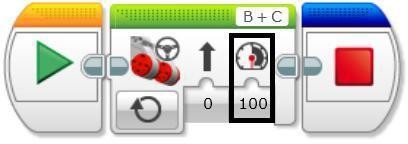 Какой параметр выделен на картинке? Какой параметр выделен на картинке? a.Рулевое управление b.Скорость c.Мощность d.Обороты Выберите верное текстовое описание программы. Начало, средний мотор, ожидание, средний мотор, остановить программу. Начало, большой мотор, ожидание, большой мотор, остановить программу. Начало, рулевое управление, таймер, рулевое управление, остановить программу. Начало, независимое управление, время, независимое управление, остановить программу. 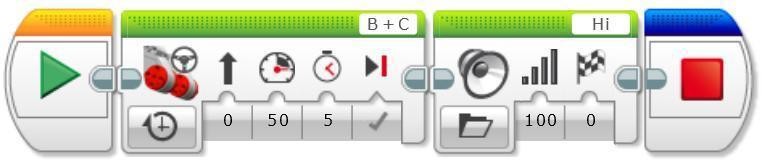 Напишите программу в текстовом варианте. Напишите программу в текстовом варианте.  Спасибо за ответы! Тест №2.Роботобнаруживаетпрепятствие.На роботе датчик касания смотрит вперед. Робот начинает двигаться. Как только обнаружится касание с препятствием, робот должен остановиться. Из скольки блоков состоит ваша программа? Остановился робот сразу после касания или еще пытался продолжить двигаться? За счет какого действия в программе нужно остановить робота, сразу после обнаружения нажатия? Простейшийвыходизлабиринта. Напишите программу, чтобы робот выбрался из лабиринта вот такой конфигурации: Что нужно сделать роботу после касания со стенкой? В какую сторону должен крутиться мотор, чтобы робот мог выполнить разворот беспрепятственно? Сколько раз робот должен сделать одинаковые действия? Ожиданиесобытийот двухдатчиков. Установите на роботе два датчика касания – один смотрит вперед, другой – назад. Напишите программу, чтобы робот менял направление движения на противоположное при столкновении с препятствием, при этом: При движении вперед опрашивается передний датчик При движении назад опрашивает задний датчик Управление звуком. Робот должен начать двигаться после громкого хлопка. После еще одного хлопка робот должен повернуть на 180 градусов и снова ехать вперед Использовать цикл, чтобы повторять действия из шага 2. Роботобнаруживает препятствие. Датчик расстояния на роботе смотрит вперед. Робот двигается до тех пор, пока не появится препятствие ближе, чем на 20 см. Парковка. Датчик расстояния смотрит в сторону. Робот должен найти пространство для парковки между двумя «автомобилями» и выполнить заезд в обнаруженное пространство. Черно-белоедвижение. Пусть робот доедет до темной области, а затем съедет обратно на светлую. Добавьте цикл в программу – пусть робот перемещается вперед-назад попеременно, то на темную, то на светлую область. Движениевдольлинии. Пусть робот перемещается попеременно, то на темную, то на светлую область. Движение должно выполняться поочередно то одним, то другим коле сом. Используйте линии разной толщины. Робот-уборщик. Роботу понадобятся датчик расстояния и цвета. Задача робота обнаружить внутри ринга весь мусор и вытолкнуть их за черную линию, ограничивающую ринг. Сам робот не долен выезжать за границу ринга. Красныйцвет–дороги нет. Робот тележка должен пересекать черные полоски – дорожки, при пересечении говорить «Black». Как только ему встретиться красная дорожка – он должен остановиться. Задание нужно выполнить с использованием вложенных условий. Спасибо за ответы! |