задание. Задания по ЛР №3_Верификация комм. протоколов (1). Протоколов Вариант 1 Представлен на рис. 14 методических указаний " Применение сетей Петри для анализа вычислительных машин, сетей и систем "
 Скачать 0.53 Mb. Скачать 0.53 Mb.
|

ВАРИАНТЫ ЗАДАНИЙ ПО ЛАБОРАТОРНОЙ РАБОТЕ«Верификация коммуникационных протоколов Вариант 1 Представлен на рис. 14 методических указаний: "Применение сетей Петри для анализа вычислительных машин, сетей и систем", составитель Чуркин В.И., шифр 44-43. Вариант 2 Протокол передачи сообщений Сеть Петри, описывающая протокол, приведена на рис.1. Протокол организует передачу сообщений 7 раз подряд без подтверждения, и затем ожидание подтверждения для следующей передачи. Срабатывание переходов t1 и t2 означает получение разрешения; t3 – передачу сообщений без подтверждения. (P2) и (P8) равно числу переданных без подтверждений сообщений, при (P2)=7 передача без подтверждения невозможна. (P3) определяет начальное количество готовых к передаче сообщений и существование (t3 t4)7, (P6)=1 означает наличие запроса подтверждения, а (P7)=1 – наличие подтверждения. Вариант 3 Модель передающей среды (канал, в котором сохраняется порядок передаваемых сообщений и возможна их потеря) Источник передает информацию приемнику через канал с буфером (n ячеек). Пока занята 1-я ячейка буфера, передача следующего сообщения невозможна (аналогично, если заняты две соседние ячейки буфера). Освобождение ячейки происходит при продвижении информации к приемнику, однако, возможна потеря сообщения. Последовательное прохождение сообщениями всех ячеек буфера исключает возможность нарушения порядка их следования. Источник (приемник), пославший (получивший) сообщение, должен подтвердить свою готовность к следующей передаче (приему). Пара позиций (Рi Рj) соответствует i-ой ячейке буфера, причем (Pi)=1 означает, что ячейка занята, а (qi)=1 – свободна. Переходы t1, t3 имитируют возможность потери сообщения (ячейка освободилась, а сообщение не передано). Переход t2n+2 – подтверждение готовности к передаче, t2n+1 – к приему, (приемник/передатчик в исходном состоянии). Вариант 4 Передача сообщений 7 раз подряд Протокол разрешает передачу сообщений 7 раз подряд, после чего должно быть получено подтверждение. Позиция Р4 (сообщение может быть послано) может получить маркер при срабатывании, либо t1 t2 (с подтверждением), либо t3 (без подтверждения). Начальная маркировка 0(P3)=7 определяет существование по следовательности (t3,t4)7 причем (Р2) равно количеству посланных после подтверждения сообщений. При (Р2)=7 передача без подтверждения невозможна. Количество серий из 7 передач без подтверждения определяется числом фишек в позиции "Подтверждение". Кратность дуг P2 – t1 и t2 – P3 равна 7. 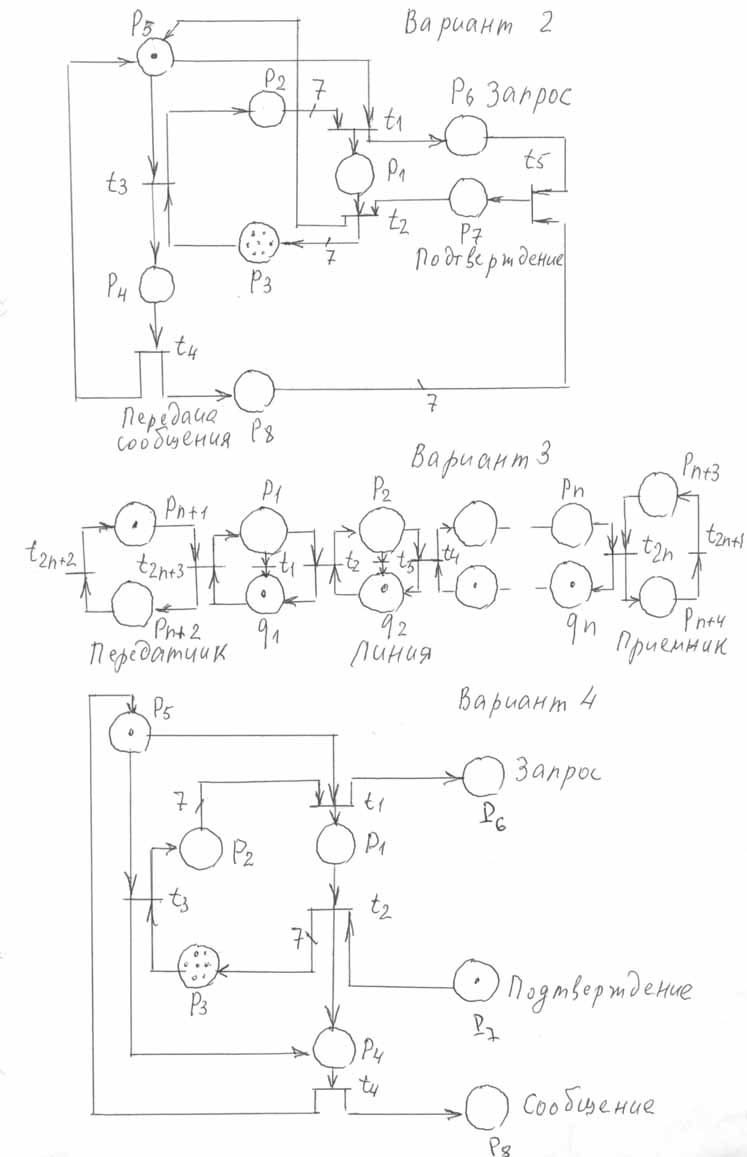 Вариант 5 Модель соединения и разъединения Для пользователей уровня сессий транспортный уровень предоставляет средства связи, устанавливая соединение между 2 объектами. Объекты управляются локально так, что каждый может быть включен в транспортное соединение, только если он разъединен, т. е. не пытался установить или не установил транспортное соединение. Следовательно, одновременные попытки установить соединение приведут к созданию двух транспортных соединений, и в транспортном соединении всегда существует инициирующий и принимающий объекты. В начальном состоянии (P1) и при получении запроса от уровня сессий объект передает запрос на соединение и ждет "Подтверждение соединения". При получении подтверждения (переход АС’) объект переходит в состояние "Передача данных" (позиция P4) и может передавать данные. Только в состоянии "Передача данных" сетевой объект может закончить установление транспортного соединения, посылая (переход DD) запрос на разъединение (позиция RD') и переходя в состояние "Ожидание подтверждения разъединения" (позиция Р5). В этом состоянии сбрасываются сообщения о данных. При получении запроса на разъединение отдаленный объект возвращается в исходное состояние, передавая (переход AD’) подтверждение разъединения (позиция CD), если он был в состоянии "Передача данных", или ничего не передавал (переход DА') или произошло "Столкновение разъединении" и он сам ожидал состояния "Подтверждение разъединения". После окончания фазы разъединения (переход FD) объект возвращается в начальное состояние. Вариант 6 Передача данных с применением тайм-аута В протоколе предусмотрена возможность прерывания приемника (переход t8), когда готовность к приему запроса временно нарушается ( (Р8)=0, (Р9)=1). Если в это время от передатчика приходит запрос, то таймер сработает так, как будто запрос потерян. Пока восстанавливается состояние передатчика для повторного запроса, приемник может перейти в состояние готовность и вновь его потерять. Эта ситуация отображается последовательностью =(t1, t8,, t4, t3, t9). В сети Петри вводятся позиция Рз (информация потеряна) и два перехода t4 и t5, соответствующих событиям потери сообщения и подтверждения соответственно. В сеть Петри передатчика вводятся позиция Р4 (таймер взведен) и переход tз (срабатывание таймера). Таймер взводится всякий раз, когда посылается сообщение t1, и срабатывает, если информация потеряна, возвращая передатчик в исходное состояние для повторной передачи. Если сообщение принято, то вместе с принятием подтверждения происходит сброс таймера (дуга Р4, t2).  Вариант 7 Сетевая модель протокола с нумерацией по модулю 2 Протокол используется для управления обменом сообщениями между двумя объектами (станциями), подключенными к каналу передачи данных. Каждая станция управляет своим собственным типом, значение которого пакуется с каждым посылаемым сообщением для обработки в качестве управляющего бита. Изменения управляющих бит в потоке сообщений используются для подтверждения сообщений, которые были посланы в обратном направлении. Если ожидаемое подтверждение не поступает во время из-за потери или задержки, то механизм тайм-аута вызывает повторную передачу сообщения. Переходам соответствуют события: SEND – посылать, RESEIVE – получать, TIMER – таймер, COMPLETE – завершить, ACKNOWLEGMENT – подтверждение приема, LOSS – потеря. Вариант 8 Передача данных Рассмотрим протокол передачи данных по каналу связи для управления технологическим процессом в реальном времени. Если канал свободен, то передающей стороной посылается сигнал S (подчеркнутый сверху) - о занятии канала и затем принимается сигнал А - о готовности к приему сообщения. После этого может быть передано сообщение М. После принятия сообщения М принимающая сторона вырабатывает сигнал S(освобождение канала) и переходит в исходное состояние. Вариант 9 Канал связи для управления технологическим процессом в реальном времени Передатчик посылает сигнал о занятии канала, затем приемник посылает сигнал о готовности к приему. После этого передатчик посылает сообщение, а приемник освобождает канал. Вариант 10 Протокол обмена данными между процессами На рисунке представлена упрощенная модель протокола обмена данными между процессами. 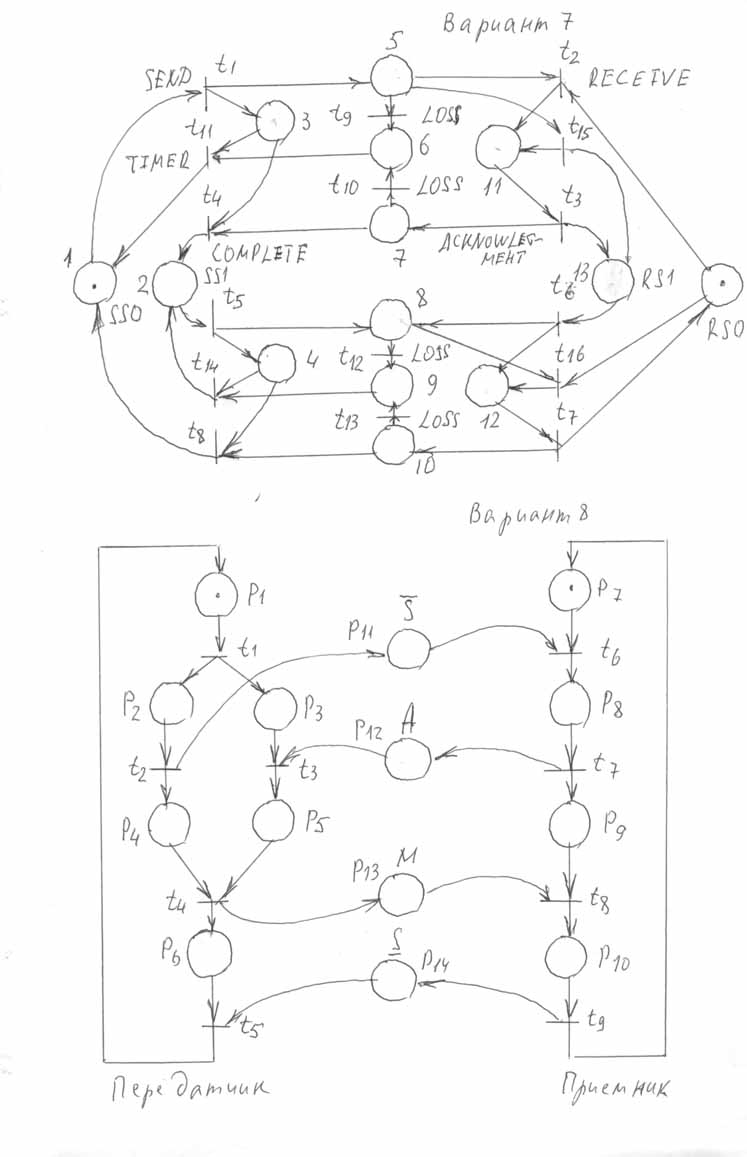 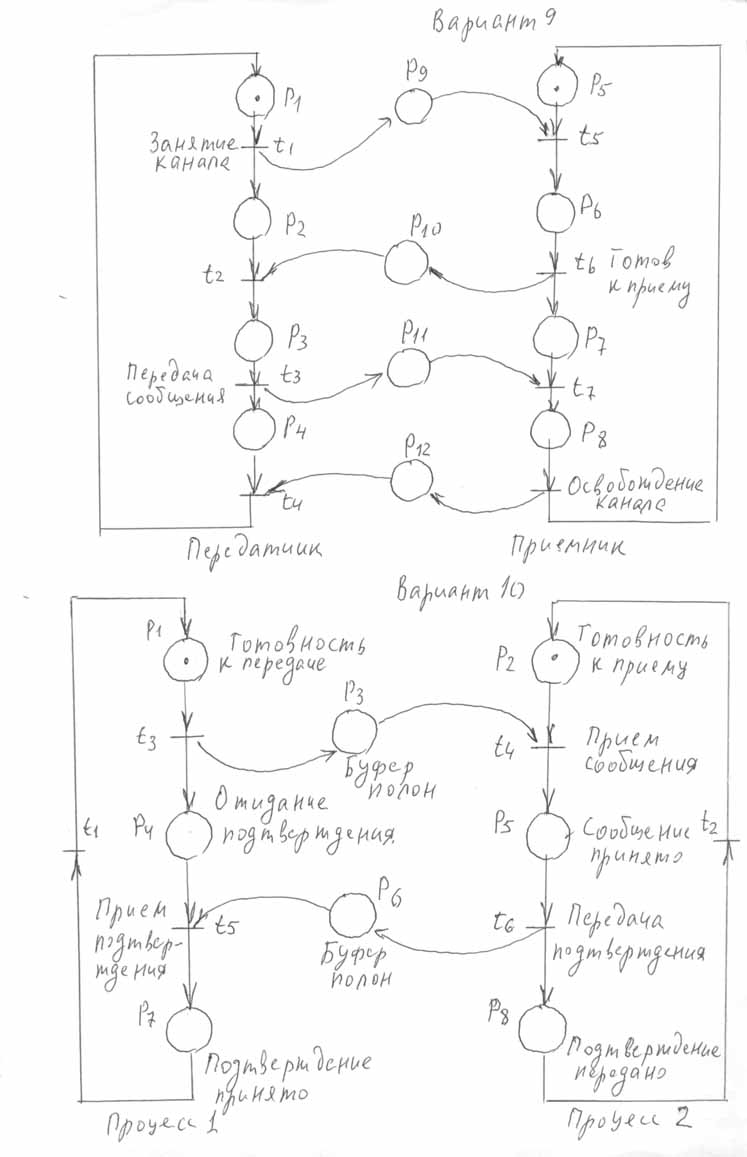 Вариант II Передача сообщений с ожиданием подтверждений На рисунке показана сеть Петри, соответствующая передаче сообщений с ожиданием положительных (АСК) или отрицательных (NАСК) подтверждений в течение заданного им интервала времени. Вариант 12 Передача сообщений с ожиданием подтверждений На рисунке показана сеть Петри, соответствующая передаче сообщений с ожиданием положительных (АСК) или отрицательных (NАСК) подтверждений в течение заданного интервала времени. Вариант 13 Передача сообщений с ожиданием подтверждений с тремя попытками На рисунке показана сеть Петри, соответствующая передаче сообщений с ожиданием положительных (АСК) или отрицательных (NАСК) подтверждений в течение заданного интервала времени. Число попыток передачи одного сообщения ограничено тремя. Вариант 14 Протокол захвата самосинхронного кольцевого моноканала Процесс захвата канала ведущим узлом с целью последующей передачи сообщения организован по основе маркерного метода доступа с использованием механизма динамических приоритетов. После начальной установки в одном из модулей, навиваемым "главным или ведущим", происходит установление сигнала УМ (установка маркера), после чего этот модуль выдает полубайт маркера в канал (маркеры кодируются свободными кодами ОРК С67). В дальнейшем при работе системы источником маркера М1 является текущий задатчик, только что завершивший выдачу концевого байта своего сообщения. Далее каждый модуль, получив на своем входе из канала маркер М1 осуществляет проверку наличия сигнала запроса на передачу сообщения из своего FIFO1 (схемы FIFO являются самосинхронными схемами буферной памяти типа First Input First Output).
Примечание: M1, M2, M3 – маркеры; Nc – полубайт своего приоритета, полученного из FIFO 1 в первом байте сообщения. Таким образом, процесс захвата завершается, и все модули переходят в одно из следующих состояний: "задатчик с приемником (З-П)", "приемник-конкурент (П-К)", "приемник-наблюдатель (П-Н)", открывая прием адреса из канала. Статус "приемник-конкурент" введен для того, чтобы отличить приемник, который сам желает осуществить захват канала, но сделать этого в данном акте арбитража не может, так как его приоритет недостаточно высок. Предусматривается механизм динамического наращивания приоритета, т. е. после завершения передачи все модули "П-К" на 1 повышают номер своего приоритета". "З-П" может, передавать сообщения в режиме "один - всем" или "один - некоторым", адресоваться и к себе самому (например, с целью контроля сообщения и того, кем и как оно было принято). Поэтому его приемный буфер FIFO 2 может быть загружен своим же сообщением. Так как в конце сообщения содержится концевое слово, оно используется как информация о тех приемниках, которые правильно приняли данное сообщение. На рисунке приняты следующие обозначения: 1 – "исходное состояние"; 2 – исходное состояние "П-К"; 3 – "конкурент"; 4 – "наблюдатель"; 5 – "конкурент-задатчик (К-З)"; 6,7-"З-П"; 8 –"П-Н"; 9 –"П-К". Переходы сети обозначены следующим образом: над чертой значение входа и внутренние предикаты типа P3, /P3 (P3=1, если есть запрос), N=Nc и Nc< N; под чертой занесено значение выхода в канал. Кроме того, одному из переходов соответствуют операции INC приоритета Nc. 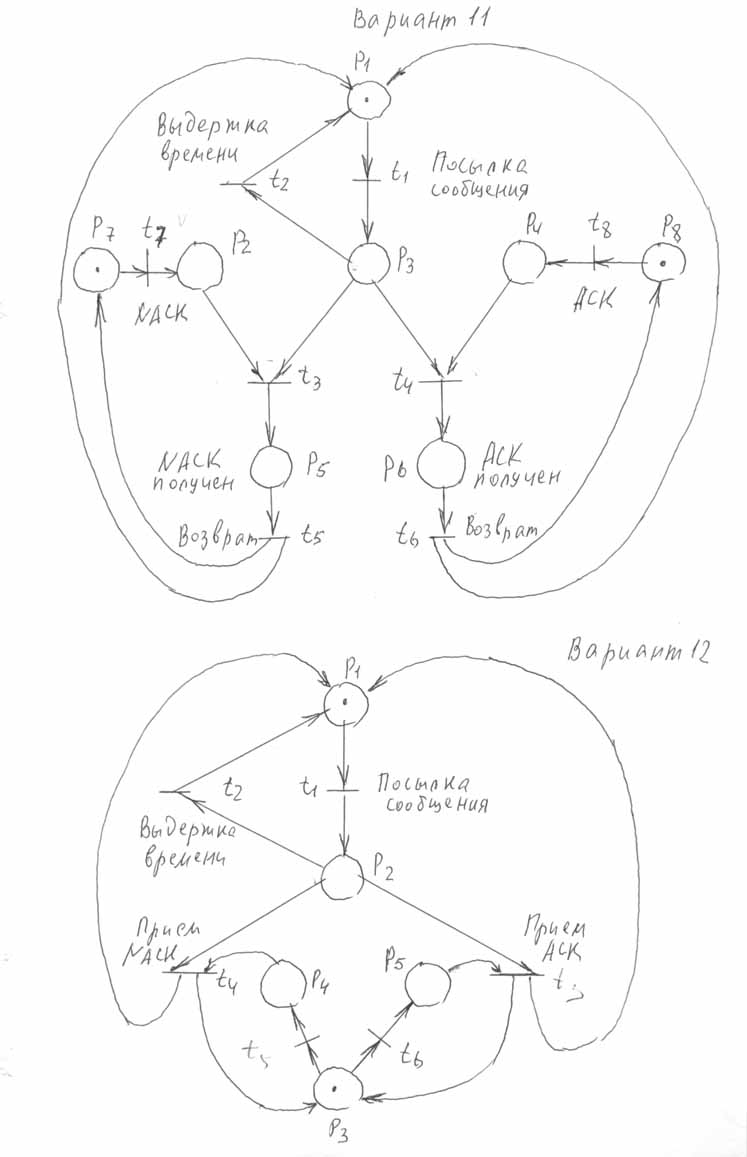 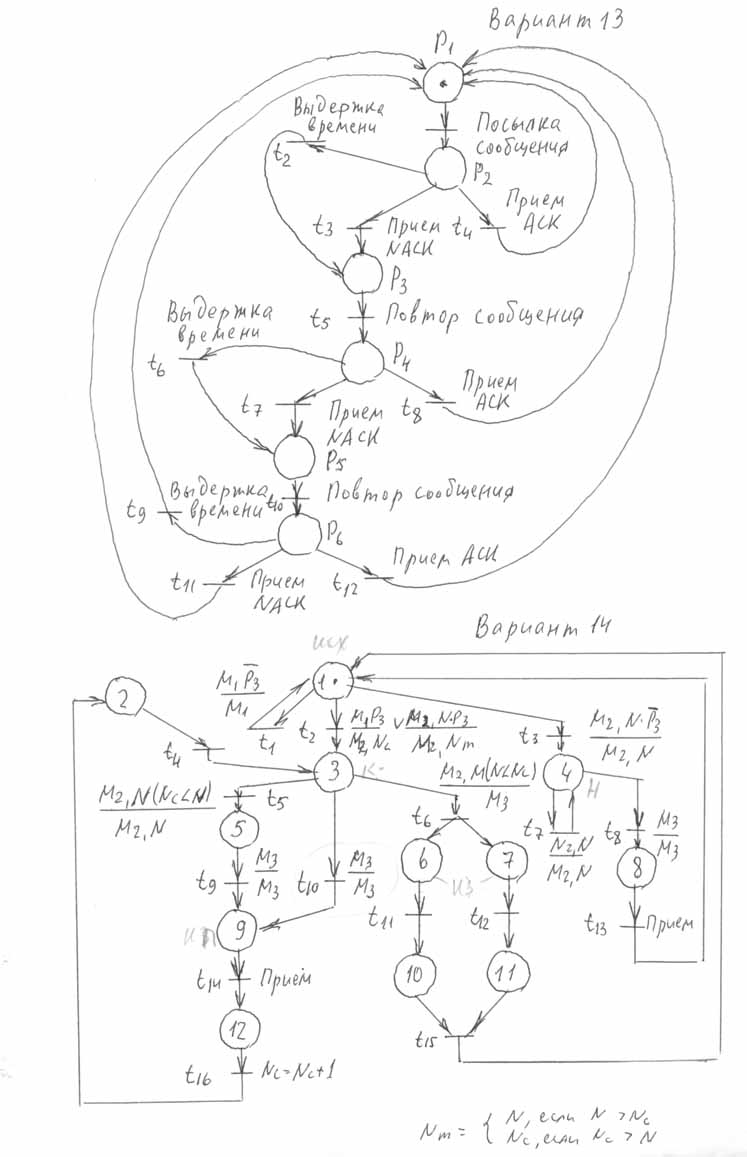 Вариант 15 Фрагмент протокола X.21 На рисунке приведен фрагмент протокола X.21. Здесь возможна посылка запроса на установление связи как от машины M1к M2, так и от M2 к M1. Последовательность 1=(t2, t6, t8, t4).соответствует запросу-ответу от M1 к M2, а 2=(t7, t1,, t3, t9) – запросу-ответу в обратном направлении. Если обе машины независимо друг от друга посылают сигналы запроса, то система окажется в тупиковой ситуации (при =(t2, t7) или ’=(t7, t2)). Эта ситуация предусмотрена в спецификации Х.21, причем приоритет установления связи отдается M1. На рисунке приоритет реализуется посредством перехода t11. Вариант 16 Передача данных с применением тайм-аута В протоколе предусмотрена возможность прерывания приемника (переход t7), когда готовность к приему-запросу временно нарушается ( (P8)=0, (P9)=0), или, если в это время от передатчика приходит запрос, то таймер срабатывает так, как будто запрос потерян. Пока восстанавливается состояние передатчика для повторного запроса, приемник может перейти в состояние готовности и вновь его потерять. Эта ситуация отображается последовательностью Z=(t1, t7, t4, t8). В сеть Петри вводится позиция рз (информация потеряна) и переход t4 (потеря сообщения). В сеть Петри передатчика вводится Р4 (таймер взведен) и переход t3 (срабатывание таймера). Таймер взводится каждый раз, когда посылается сообщение и срабатывает, если информация потеряна, возвращая передатчик в исходное состояние для повторной передачи. Если сообщение принято, то вместе с принятием подтверждения происходит сброс таймера (дуга Р4, t2). 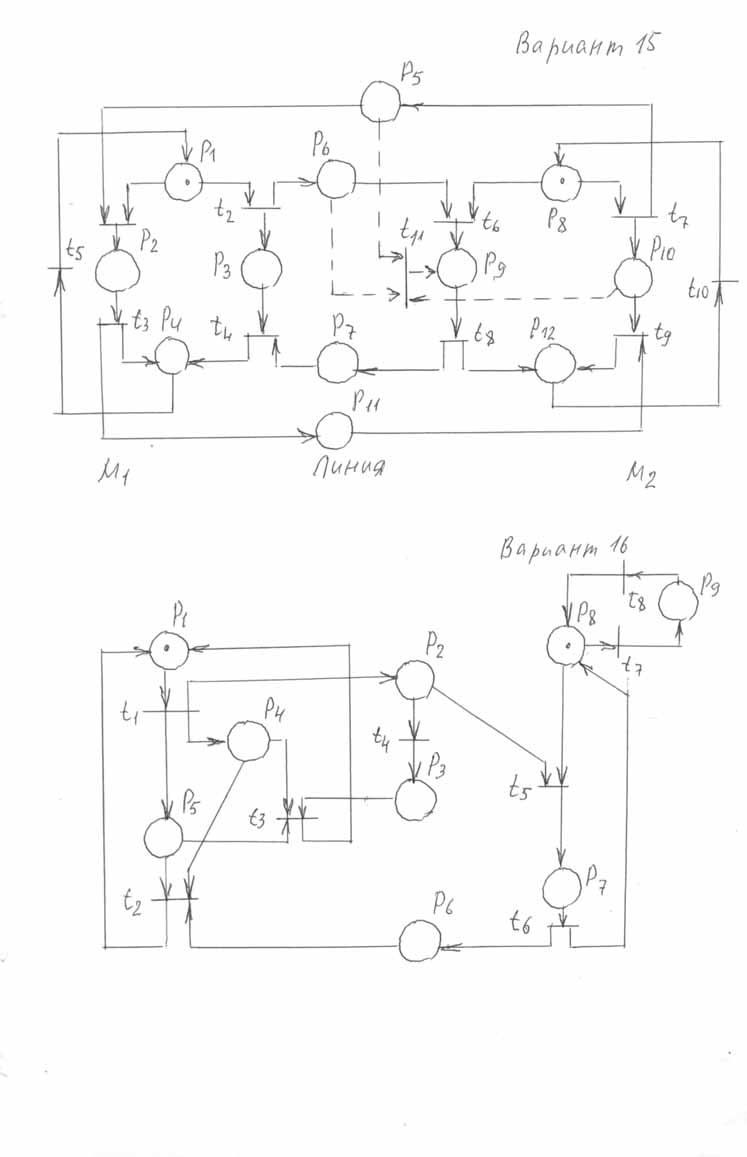 Вариант 17 Фрагмент протокола X.21 На рис. приведен упрощенный фрагмент протокола X.21. Здесь возможна посылка запроса на установление связи как от машины M1к M2, так и от M2 к M1. Последовательность 1=(t2, t6,, t8, t4).соответствует запросу-ответу от M1 к M2, а 2=(t7, t1,, t3, t9) – запросу-ответу в обратном направлении. Вариант 18 Фрагмент интерфейса Х.21 На рисунке приведен упрощенный фрагмент интерфейса X.21. Здесь возможна посылка запроса на установление связи как от машины M1к M2, так и от M2 к M1. Последовательность 1=(t2, t6,, t8, t4) соответствует запросу-ответу от M1 к M2, а 2=(t7, t1,, t3, t9) – запросу-ответу в обратном направлении. Если обе машины независимо друг от друга посылают сигналы запроса, то система окажется в тупиковой ситуации при =(t2, t7) или ’=(t7, t2). Эта ситуация предусмотрена в спецификации Х.21, причем приоритет установления связи отдается M1. По 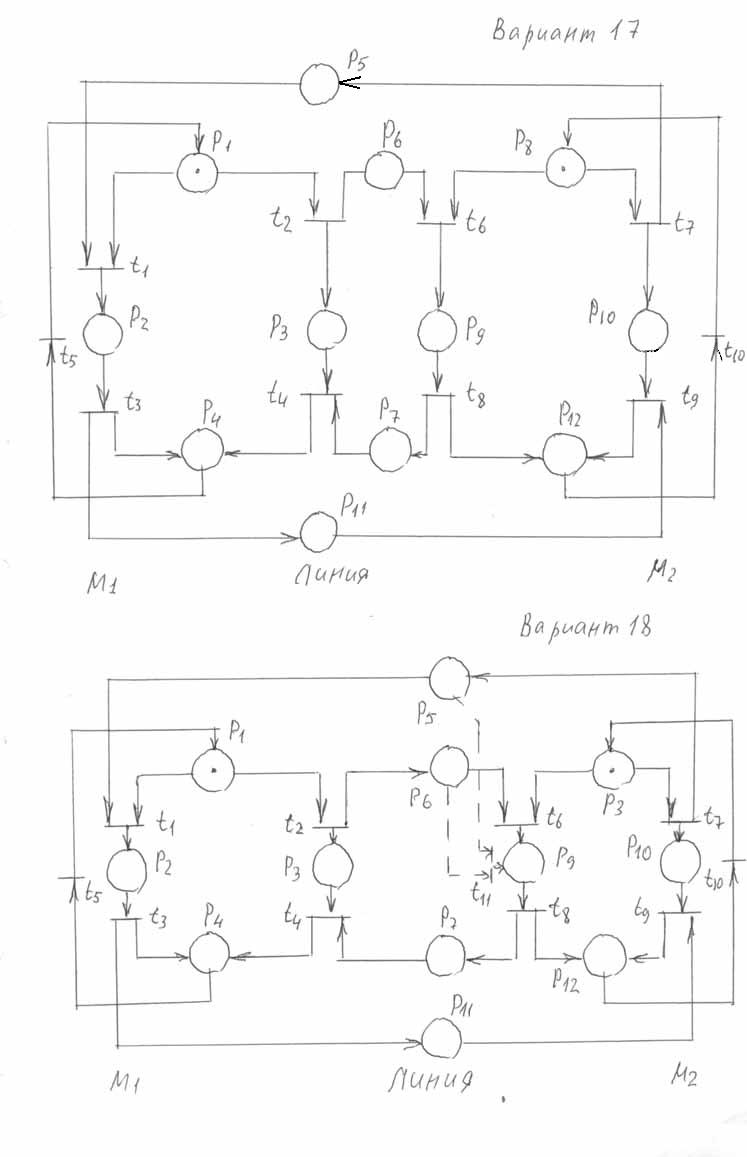 |