Отчет по практике. Белко ОПП. Проверка и запись управляющих программ на носители для эспу
 Скачать 1.07 Mb. Скачать 1.07 Mb.
|

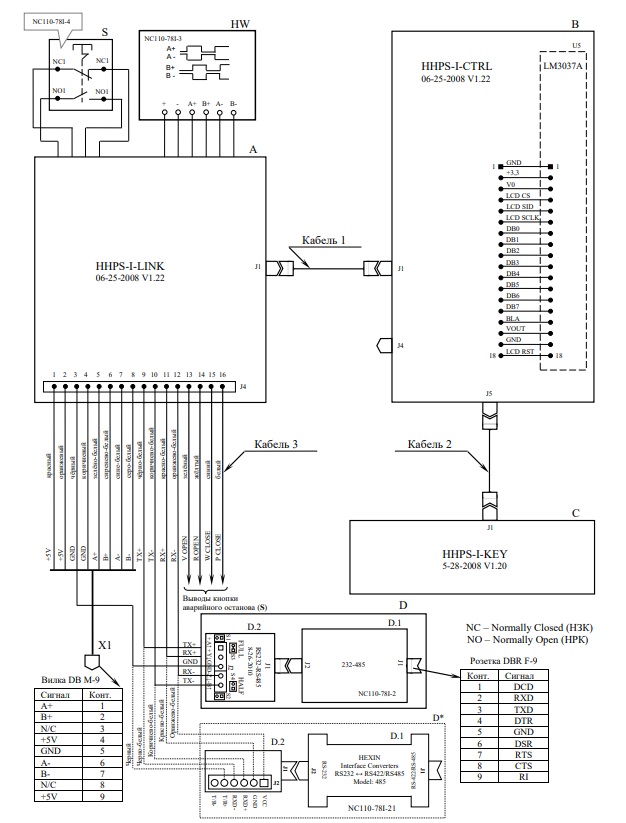 Рисунок 2.2 – Функциональная схема пульта оператора NC110-7. Расположение элементов платы разъёмов А (HHPS-I-LINK) представлено на рисунке 6.4. Плата разъёмов А обеспечивает распределение сигналов между внешним кабелем и составными частями ВСП. К плате подводится внешний кабель ВСП NC110-78I (кабель 3). Каждый провод кабеля 3 имеет цветовую маркировку. Конец кабеля 3 на плате фиксируется металлическим хомутиком. В плате В расположен контроллер ВСП (U1), который управляет работой дисплея (U5), работой индикаторов и клавиатуры, установленных на плате С (U2), а также обеспечивает взаимодействие ВСП NC110-78I с процессором УЧПУ по последовательному полнодуплексному каналу связи RS-485 (4-х провода) (U3: MAX489), обеспечивая контроль чётности передаваемой и принимаемой информации. Микросхема MAX489 представляет собой маломощный полнодуплексный приёмо-передатчик, который позволяет работать как с каналом RS-422, так и с 4-х проводным каналом RS-485. Для работы канала используются два дифференциальных сигнала: +RxD, -RxD - на приём, +TxD, -TxD - на передачу. Плата клавиатуры С включает в себя 16 клавиш, индикаторы подсветки LED1-LED3 трёх свободно программируемых клавиш «F1»- «F3» и разъём J1 для подключения кабеля 2. Преобразователь интерфейсов RS232-RS485 (D) предназначен для взаимного электрического преобразования сигналов интерфейса RS232 и RS485. Разъём D.1: J1 предназначен для подключения к разъёму канала RS-232 (COM1) УЧПУ. Разъём D.2: J2 служит для подключения к каналу RS-485 ВСП NC110-78I. Разъёмы D.1: J2 и D.2: J1 позволяют соединить преобразователь интерфейсов и коммутатор режимов между собой. Электронный штурвал HW управляет перемещением осей станка в ручном режиме. Он задаёт направление движения «+» (по часовой стрелке) или «-» (против часовой стрелки) и величину перемещения осей. Сигналы штурвала выведены на разъём X1 (вилка DB M-9) ВСП. Распайка сигналов разъёма X1 показана на рисунке 6.1. Разъём X1 используется для подключения к каналу электронного штурвала или каналу энкодера УЧПУ. Напряжение +5В для питания штурвала и плат ВСП NC110- 78I поступает от УЧПУ по каналу штурвала/энкодера. Кнопка аварийного останова S имеет две группы контактов с фиксацией: НЗК (NC1) и НРК (NO1). Коммутируемый сигнал – не более 30В/2А. Выводы контактов кнопки аварийного останова S следует подключить к цепи аварийного отключения объекта управления. 2.3 Исследование интерфейса связи (схемный анализ) VGA (разъём) — 15-контактный субминиатюрный аналоговый разъём для подключения мониторов по стандарту видеоинтерфейса VGA. VGA работает по обычному принципу горизонтально-вертикальной развёртки. Изменение напряжения на RGB-пинах означает для ЭЛТ изменение интенсивности луча электронных пушек кинескопа и, соответственно, яркости светового пятна на экране, для LCD матрицы изменение яркости свечения пикселей. Максимальное напряжение сигнала RGB-пинов составляет 0,7 В макс (входное сопротивление 75 Ом). Описывается расположение и назначение 15-штыревого (пинового) разъёма/гнезда VESA DDC2/E-DDC; нумерация в списке соответствует цифрам на иллюстрации справа разъёма-«мамы» справа налево, сверху вниз: RED — красный канал видео; GREEN — зелёный канал видео; BLUE — синий канал видео; ID2/RES — ранее второй бит ID монитора, стал зарезервирован с появлением E-DDC; GND — земля горизонтальной синхронизации; RED_RTN — земля красного канала; GREEN_RTN — земля зелёного канала; BLUE_RTN — земля синего канала; KEY/PWR — ранее ключ (отсутствовал контакт в вилке), сейчас +5 В постоянного тока для E-DDC (узлы E-DDC работают при отключенном питании монитора); GND — земля вертикальной синхронизации и DDC; ID0/RES — ранее нулевой бит ID монитора, стал зарезервирован с появлением E-DDC; ID1/SDA — ранее первый бит ID монитора, стал использоваться для I²C с появлением DDC2; HSync — горизонтальная синхронизация; VSync — вертикальная синхронизация; ID3/SCL — ранее третий бит ID монитора, линия тактирования I²C с появлением DDC2. 2.4 Разработка принципиальной схемы субблока (модуля) (или схемы подключения) Инструментом общения оператора с панелью оператора, какому бы терминалу (пассивному, активному) она ни принадлежала, являются дисплей и клавиатура. Клавиатура предназначена для выбора режима работы; ввода алфавитно-цифровых данных; управления курсором с целью редактирования вводимой информации; смены страниц информации, выводимой на дисплей; изменение системы отсчеты, выбора дискретности перемещений; ввода исполнительных команд типа «включить», «выключить», «пуск», «стоп»; задание укрупненных команд типа технологических циклов и др. Экран дисплея содержит информацию следующего вида: состояние системы управления (указание режима, сообщение об ошибках и сбоях); состояние управляемого объекта, т. е. станка (положение рабочих органов в различных системах координат, подача, частота вращения шпинделя, имена выполняемых циклов автоматики, сведения о выполняемой управляющей программе, текст выполняемого фрагмента управляющей программе); описание всех «прошлых» действии оператора; описание стандартных циклов обработки, включая их графическую интерпретацию; представление статико-графической модели управляющей программы (наложенные эскизы заготовки и изделия с указанием всех рабочих и вспомогательных проходов); представление динамико-графической модели процесса обработки (изображение текущего состояния и его развития в реальном времени). 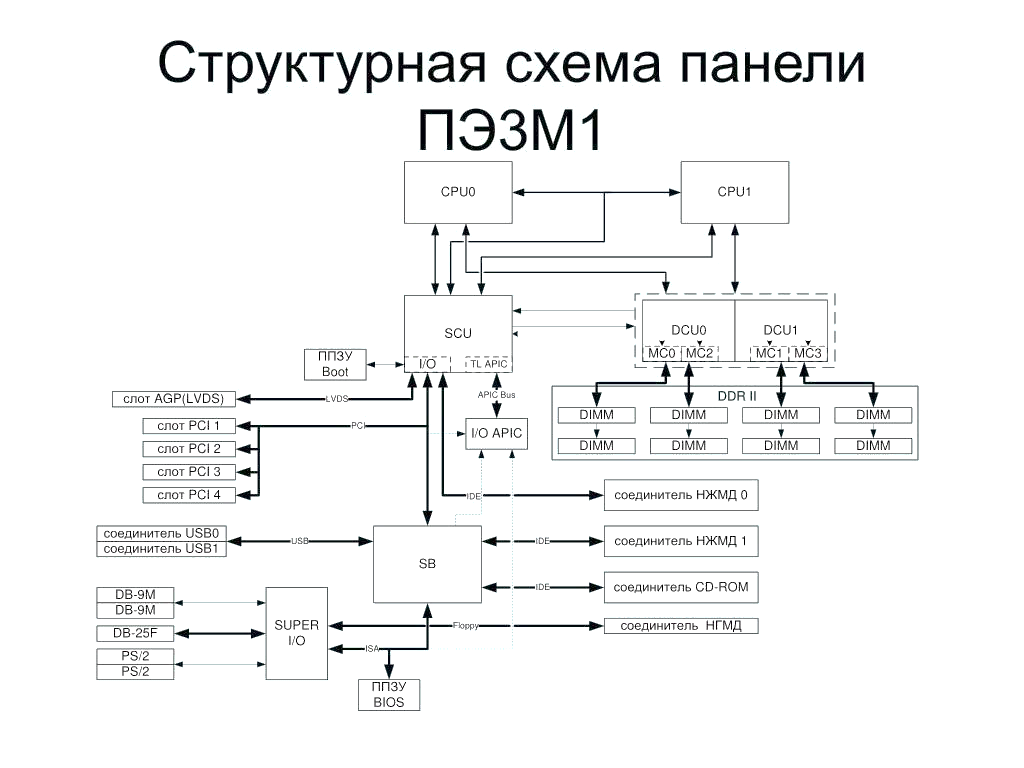 Рисунок 2.3 – Структурная схема панели оператора Информация, появляющаяся на экране дисплея, отражает ту часть решения терминальной задачи, которая в данный момент интересует оператора. Если панель оператора является компонентой пассивного терминала (т. е. консоли оператора), то само решение терминальной задачи осуществляется в устройстве ЧПУ. Если же панель оператора придана активному терминалу (т. е. персональному компьютеру), то решение терминальной задачи выполняется в самом терминале. Объём предоставляемой оператору информации, т. е. объём дисплейных функций, во многом определяет функциональные возможности устройства ЧПУ. В связи с анализом дисплейных функций целесообразно ввести три понятия: формат, глава, страница. Формат – принятый порядок деления поверхности экрана на функциональные зоны. Глава – содержание функционально зоны. Страницей назовём фрагмент главы, визуализируемый на экране в данный момент времени. Таким образом, глава состоит из одной или несколько страниц, а разнородные главы могут быть организованы в разных одинаковых форматах. Клавиатура позволяет перелистывать главы, а также страницы тех глав, информация которых не умещается на одной странице. При перелистывании страниц формат главы сохраняется, а при смене глав формат может измениться. Функциональные зоны каждого формата обозначены цифрами в треугольных скобках: <1> - номер управляющей программы и кадра этой программы; <2> - состояние системы управления; <3> - указатель кадра; <4> - указатель программы; <5> - указатель текущего положения; <6> - указатель таблиц коррекций; <7> - список действующих G функций; <8> - список адресов и команд; <9> - работа в режиме ручного ввода данных; <10> - фрагмент управляющей программы; <11> - текущее положение рабочих органов станка; <12> - номер программы; <13> - номер кадра; <14> - текущее положение в относительной системе координат; <15> - текущее положение в системе координат детали; <16> - текущее положение в абсолютной системе координат; <17> - путь до конца обработки кадра; <18> - номер и величина коррекции инструмента; <19> - рабочий кадр; <20> - буферный кадр; <21> - ручной ввод данных; <22> - фактическое положение. Под номерами программы и кадра в различных режимах понимают разное. Так, в качестве номера программы может быть указан либо номер текущей программы, либо номер последней из исполненных программ, либо номер программы, исполнение которой прервано, либо номер текущей программы, либо номер разыскиваемой программы. В качестве номера кадра выступает или номер текущего кадра, или номер последнего из исполненного или номер разыскиваемого кадра. Характеристика отдельных глав. Первая глава содержит полный список всех адресов и список заданных команд одного кадра, а также список так называемых «модальных» G-функций, т. е. тех, которые действуют в данном кадре. В режиме ручного ввода список команд можно изменять или пополнять. С этой целью команду набирают в области <9>, а затем переводят в число действующих в область <8> с помощью директивы ВВОД, набираемой на панели оператора. Вторая глава предоставляет оператору фрагмент программы. Как правило, полный текст программы в области <10> не размещается, и просмотреть его целиком можно, лишь перелистывая страницы. Клавиатура панели оператора позволяет перемещать по полю экрана курсор, подчеркивающий ту или иную команду. Подчеркнутую команду можно убрать или изменить в режиме редактирования. Третья и четвёртая главы осуществляют индикацию текущего состояния. При этом индикация возможна в относительной или абсолютной системах координат в увеличенном масштабе или во всех координатных системах одновременно в обычном масштабе. Пятая глава служит для визуализации коррекций инструмента (радиуса фрезы, длины инструмента). Любой компонент таблицы коррекций может быть изменён. Шестая глава несёт в себе информацию, которая наиболее нужна в автоматическом режиме, это информация о двух смежных кадрах управляющей программы (рабочем и буферном). Седьмая глава ориентирована на редактирование управляющей программы. В режиме ручного ввода данных в области <21> может быть, в частности, составлен целый кадр, а далее введен в число действующих директивой «ВВОД» панели оператора. 2.5 Описание алгоритма поиска заданной неисправности На рисунке 2.4 представлена блок-схема алгоритма поиска и устранения неисправности – «Не вращается шпиндель». 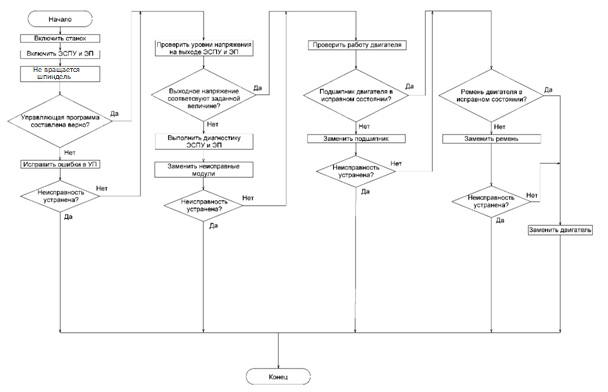 Рисунок 2.4 – Блок-схема алгоритма поиска и устранения неисправности («Не вращается шпиндель») На основании блок-схемы алгоритма поиска неисправности необходимо составить словесный алгоритм, где должны быть описаны мероприятия по поиску и устранению заданной неисправности – «Не вращается шпиндель». Данная неисправность может возникать по нескольким причинам. Первой и маловероятной причиной может послужить неверно составленная программа. Необходимо проанализировать программу и в случае ошибок исправить их. Следующей возможной причиной может стать скачки в напряжении на выходе ЭСПУ и ЭП. Для решения данной проблемы следует выполнить диагностику ЭСПУ и ЭП. И в случае неисправности заменить неисправные модули. Так же следует проверить работу двигателя на наличие поломок. Причиной может послужить неисправный подшипник двигателя, в следствии чего и возникает прерывистое вращение шпинделя. Для решения неисправности следует заменить подшипник. Так же возможной причиной может послужить ремень двигателя. Следует проверить ремень, не растянулся ли он и присутствует ли натяжение. Для решения следует заменить ремень. В противном случае следует заменить двигатель. 3 ЭКОНОМИЧЕСКАЯ ЧАСТЬ 3.1 Методика расчёта трудоёмкости капитального ремонта станка с ЭСПУ Трудоемкость – время необходимое для выполнения капитального ремонта. Трудоемкость капитального ремонта рассчитывается по формуле Т = Тмех. + Тэлектр. + Тэлектрон. (3.1)
В свою очередь Тмех., Тэлектр., Тэлектрон. рассчитываются по формулам Тмех. = ЕРСмех.·Н1 (3.2) Тэлектр. = ЕРСэлектр.·Н2 (3.3) Тэлектрон. = ЕРСэлектрон.·Н3 (3.4)
ЕРС механической части – это ремонтная сложность некоторой условной машины, трудоёмкость капитального ремонта механической части которой отвечает по объёму и качеству требованиям ТУ на ремонт равна 35 н-ч. в неизменных организационно-технических условиях среднего ремонтного цеха машиностроительной организации. ЕРС электрической части – это ремонтная сложность некоторой условной машины, трудоёмкость капитального ремонта электрической части которой отвечает по объёму и качеству требованиям ТУ на ремонт равна 8,6 н-ч. в неизменных организационно-технических условиях среднего ремонтного цеха машиностроительной организации. ЕРС электронной части – это ремонтная сложность некоторой условной машины, трудоёмкость капитального ремонта электронной части которой отвечает по объёму и качеству требованиям ТУ на ремонт равна 5,3 н-ч. в неизменных организационно-технических условиях среднего ремонтного цеха машиностроительной организации. 3.2 Методика расчёта численности рабочих, занятых капитальным ремонтом станка с ЭСПУ В организации ведется учет и планирование рабочих, занятых капитальным ремонтом станка с ЭСПУ Важнейшим элементом использования рабочей силы является определение нормативной численности, необходимой для обеспечения бесперебойного производственного процесса. В основе ее расчета лежит определение баланса рабочего времени, который составляется по предприятию в целом и по его структурным подразделениям. Баланс рабочего времени включает определение: среднего фактического числа рабочих дней в предстоящем году, средней продолжительности рабочего дня и полезного фонда рабочего времени. На основании планируемого фонда рабочего времени рассчитывается нормативная численность Из производственного календаря, который составляется на текущий год, берется номинальный фонд времени Фн на текущий год. Он означает, сколько всего рабочих часов (дней) в году. На основании этих данных рассчитывается действительный фонд времени и выражается формулой  (3.5) (3.5)
Рассчитать численность рабочих можно по следующей формуле  (3.6) (3.6)
3.3 Методика расчёта себестоимости капитального ремонта станка с ЭСПУ Для определения себестоимости капитального ремонта станка с ЭСПУ необходимо определить годовой фонд оплаты труда. Годовой фонд оплаты труда состоит из основного и дополнительного фонда заработной платы. Фонд основной заработной платы – это зарплата за выполненную работу. По своей структуре он включает в себя: тарифный (прямой) фонд по действующим расценкам (тарифным ставкам), премии, доплаты за бригадирство, обучение учеников, работу в ночное время. Фонд дополнительной зарплаты – это зарплата за неотработанное время, предусмотренное законодательством. По своей структуре он включает в себя оплату отпусков, выполнение государственных обязанностей, оплату перерывов кормящим матерям, сокращенного рабочего дня подросткам и т.д. Фонд зарплаты рассчитывается по формуле ФОТ = ФЗПосн+ФЗПдоп (3.7)
Фонд основной заработной платы рассчитывается по формуле |