|
|
Расчёт статически неопределимой рамы методом сил и методом перем. Расчёт статически неопределимой рамы методом сил
Расчёт статически неопределимой рамы методом сил
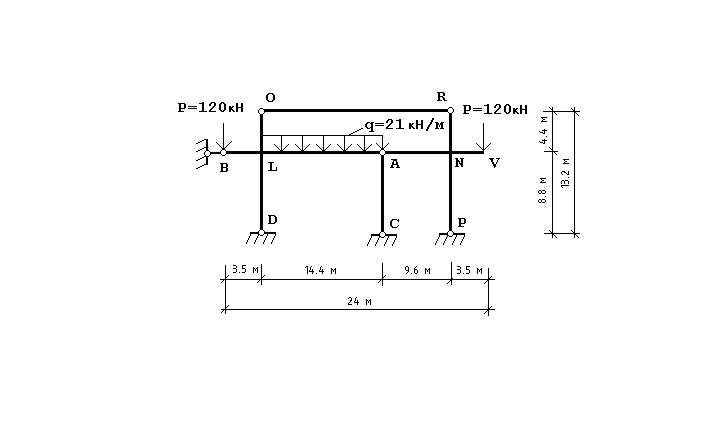
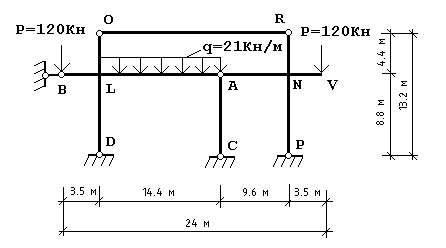
Исходные данные:
1.Определим количество лишних связей:

2.Выберем основную систему. Основная система должна бать статически определимой, а так же не должна быть геометрически изменяемой. Для её получения заменим три усилия в заданной системе на основные неизвестные метода сил: две реакции слева от шарнира А и усилие в затяжке (рис.1):
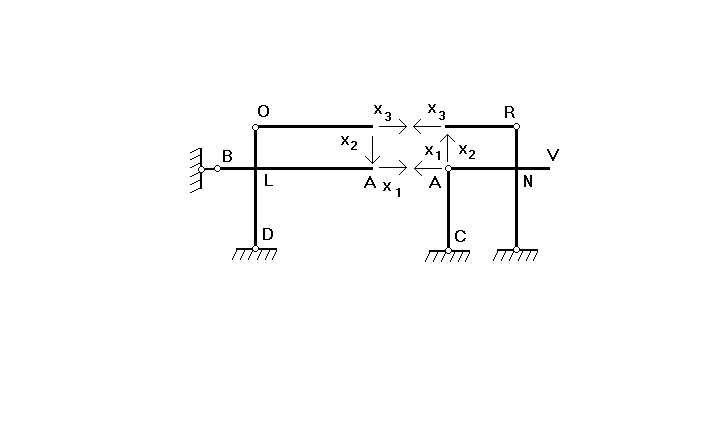
рис.1
3. Запишем систему канонических уравнений в общем виде :

()
или в матричной форме:
где А – матрица коэффициентов при неизвестных, а  , соответственно, вектор неизвестных и вектор свободных членов системы ( , соответственно, вектор неизвестных и вектор свободных членов системы (
).
4. Для того, чтобы вычислить коэффициенты и свободные члены канонических уравнений, строим в основной системе эпюры изгибающих моментов от единичного действия Х1, Х2, Х3 и заданной нагрузки .
Определим опорные реакции в состоянии на рис.2.


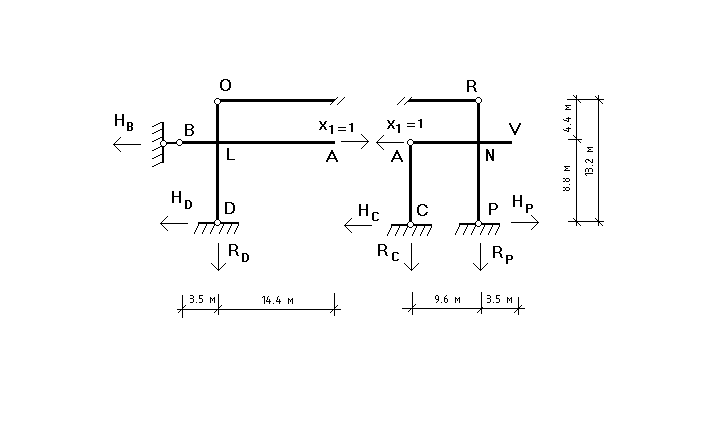
рис.2
Определим опорные реакции в состоянии на рис.3.
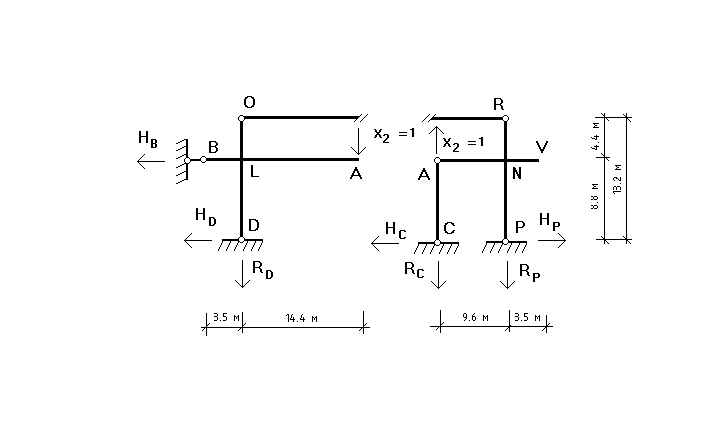
рис.3
Определим опорные реакции в состоянии на рис.4.
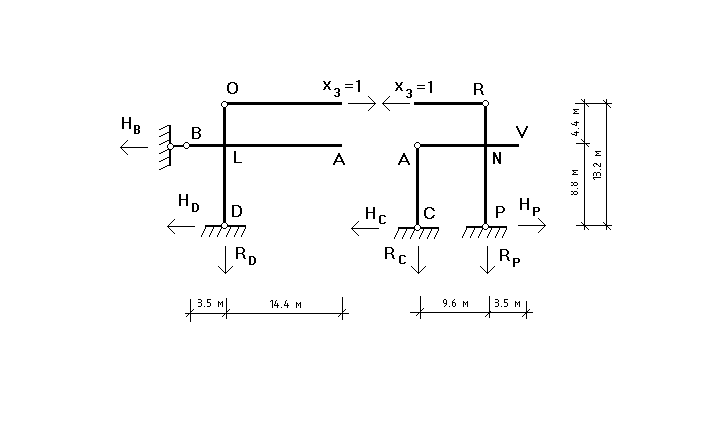
рис.4
Определим опорные реакции в состоянии на рис.5.

рис.5
Эпюры изгибающих моментов от Х1=1, Х2=1, Х3=1 и от заданной нагрузки показаны на рис.6.
5. Вычислим коэффициенты и свободные члены канонических уравнений. Для определения коэффициентов и свободных членов, представляющих собой перемещения точек приложения неизвестных, перемножаем эпюры изгибающих моментов (используя способ Верещагина и формулу Симпсона) , построенные в основной системе (рис.6).

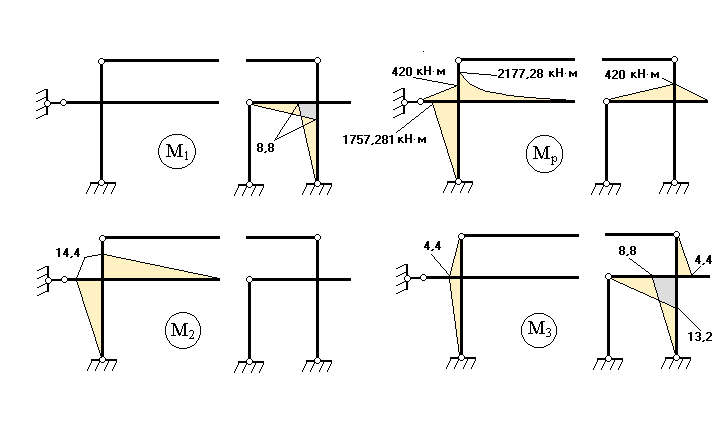
рис.6
6.Для проверки правильности вычисления коэффициентов и свободных членов системы (
) строим суммарную единичную эпюру изгибающих моментов  (рис.7). (рис.7).

рис.7
 Результат умножения суммарной единичной эпюры на саму себя должен быть равен алгебраической сумме коэффициентов при неизвестных всех уравнений, т.е. должно выполняться равенство: Результат умножения суммарной единичной эпюры на саму себя должен быть равен алгебраической сумме коэффициентов при неизвестных всех уравнений, т.е. должно выполняться равенство:
 Результат перемножения суммарной единичной эпюры на эпюру моментов Мp от заданной нагрузки в основной системе должен дать алгебраическую сумму свободных членов системы ( Результат перемножения суммарной единичной эпюры на эпюру моментов Мp от заданной нагрузки в основной системе должен дать алгебраическую сумму свободных членов системы (
), т.е. должно выполняться равенство:

Так как оба условия выполняются, то коэффициенты вычислены верно.
7. С учетом найденных коэффициентов система (
) примет вид:
  решая которую получим следующие значения неизвестных: решая которую получим следующие значения неизвестных:
Умножив эпюры  на значения соответствующих неизвестных и просуммировав с эпюрой на значения соответствующих неизвестных и просуммировав с эпюрой  , получим искомую эпюру моментов (рис.8). , получим искомую эпюру моментов (рис.8).
8. Выполним кинематическую проверку построения эпюры М. Для этого перемножим эпюру М на суммарную эпюру S:

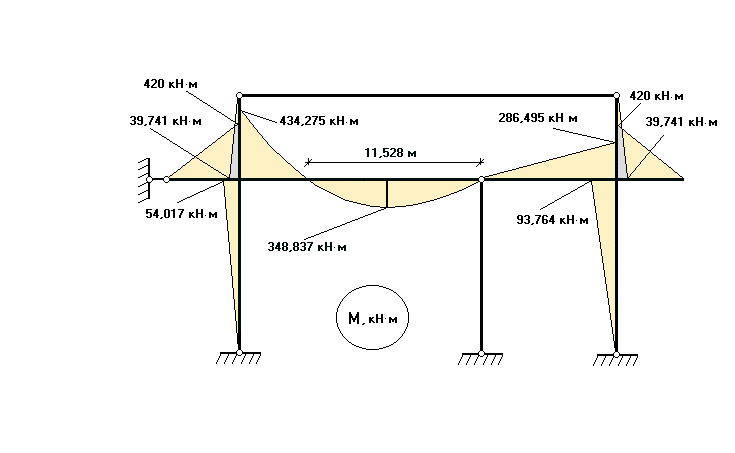
рис.8
Следовательно, эпюра М построена верно.
9. Найдем значения поперечных сил в стержнях рамы , используя эпюру изгибающих моментов .Связь между значениями поперечных сил изгибающими моментами выражается формулой :
 , где , где
 - значение поперечной силы в сечениях простой шарнирно-опертой балки; - значение поперечной силы в сечениях простой шарнирно-опертой балки;
 - значения соответственно изгибающих моментов в сечениях на концах стержня (или участка) и длина стержня (участка). Моменты - значения соответственно изгибающих моментов в сечениях на концах стержня (или участка) и длина стержня (участка). Моменты  и и  следует принимать с разными знаками, если они отложены на эпюре по разные стороны оси стержня. следует принимать с разными знаками, если они отложены на эпюре по разные стороны оси стержня.
Эпюра поперечных сил представлена на рис.9
10. Эпюра продольных сил строится с помощью эпюры поперечных сил с использованием условий равновесия последовательно вырезаемых узлов рамы, к которым прикладываются уже известные поперечные силы и отыскиваемые продольные силы. Вырезать узлы следует в такой последовательности, чтобы в каждом рассматриваемом узле было не более двух неизвестных продольных сил, и эти силы не были бы параллельны друг другу (рис.10):
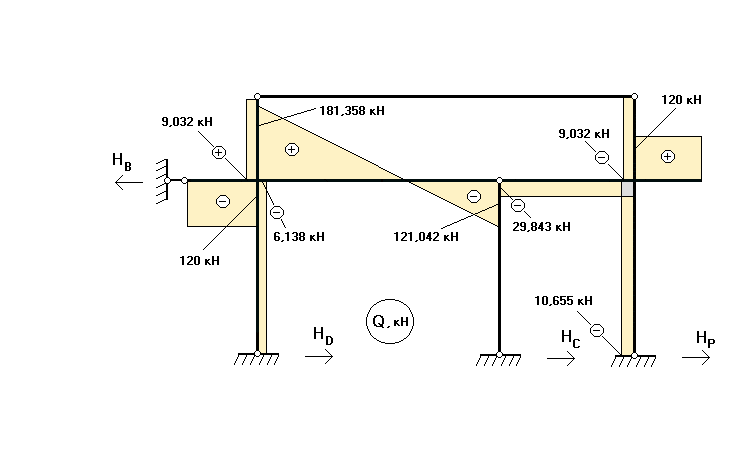
рис.9

рис.10
Рассмотрим узел О:
Рассмотрим узел N:

Рассмотрим узел A:

Рассмотрим узел L:

Эпюра продольных сил представлена на рис.11.
11. Выполним статическую проверку всей рамы. Для этого отсечем ее от опор, а значения продольных и поперечных сил в полученных сечениях принимаем по эпюрам Q и N (рис.12).

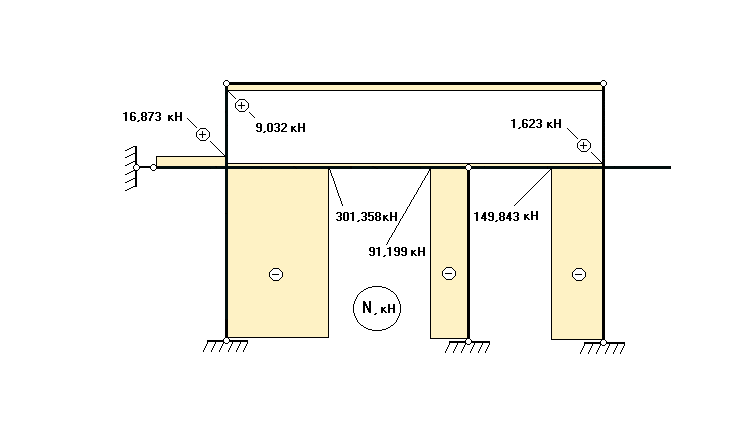 рис.11 рис.11
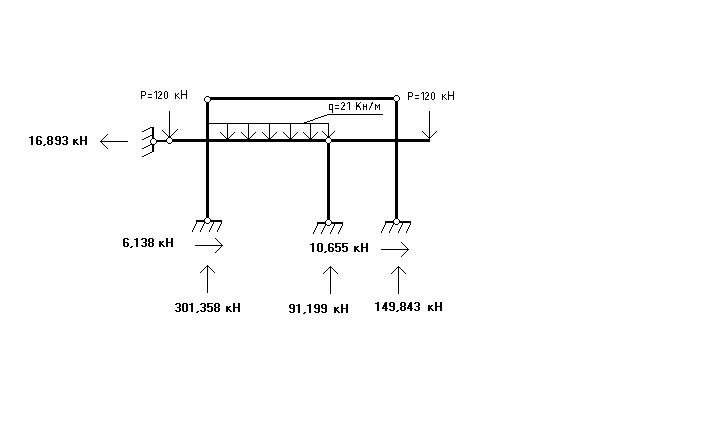
рис.12
Рама рассчитана верно.
Расчет статически неопределимой рамы методом перемещений.
Исходные данные:
1. Определим степень кинематической неопределимости рамы, которую можно определить по формуле:
n= nл + nуг ,
где nл и nуг соответственно количество неизвестных линейных и угловых перемещений узлов системы. Так как nуг суть количество жестких узлов рамы, то nу= 2. Для определения nл введем в каждый узел рамы шарнир (консоль отбрасывается) и подсчитаем степень свободы W полученной рамы (рис.1) по формуле:
W=3Д-2Ш-С0 ,
где Д, Ш, С0 – соответственно количество дисков (стержней), шарниров и опорных связей:
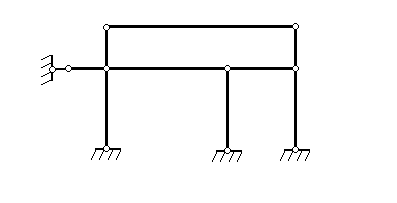
рис.1
W=3. 9 – 2 . 9 –7 = 2.
Следовательно, n= 2 + 2=4.
2. Так как степень кинематической неопределимости рамы W=4, то узлы рамы имеют 4 независимых перемещения . Для того, чтобы лишить перемещения узлов, введем по направлению линейных перемещений, соответственно, в узле B вертикальную и в узле R горизонтальную связи, а в узлах O и P защемляющие связи , необходимые для закрепления этих узлов от поворота (защемления не препятствуют линейным смещениям закрепляемых узлов) - основная система метода перемещений(рис.2).
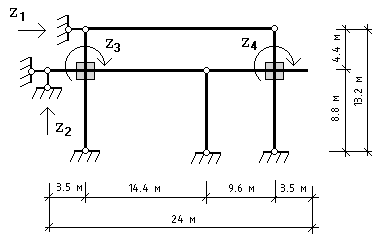
рис.2
3. Запишем систему канонических уравнений метода перемещений в общем виде :
(*)
4. Найдем значения коэффициентов системы канонических уравнений. Будем последовательно смещать каждую из добавленных связей, оставляя остальные на месте, и приложим к основной системе заданную нагрузку. Получим так называемые единичные состояния основной системы и состояние загружения ее заданной нагрузкой. Рассмотрим эти состояния.
В состоянии на рис.3 задано единичное линейное смещение опоры О (для всех неизвестных на рисунках принято положительное направление). В результате узлы O и R смещаются по направлению смещения точки О на величину Z1=1. При этом стержни OL и RN изгибаются, но узлы L и N не поворачиваются благодаря наличию в них защемляющих связей. Стержень OR остался недеформированным. Учитывая, что сближением концов при изгибе мы так же пренебрегаем, расстояние по вертикали между узлами O и L , R и N не изменяется. Узлы L и N не имеют ни угловых, ни линейных деформаций, поэтому остальные стержни рамы не деформируются.
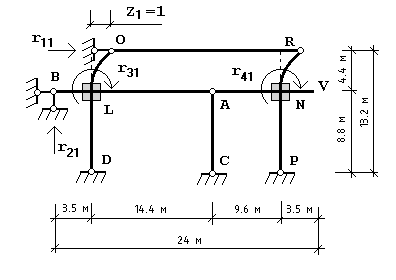
рис.3
В состоянии на рис.4 задано единичное линейное смещение Z2=1 опоры В в вертикальном направлении, в результате чего стержень BL изгибается. Узел L лишён возможности поворачиваться, следовательно, остальные стержни, к нему примыкающие, не деформируются.
На рис.5 показано состояние, в котором находится рама после единичного углового смещения Z3=1 узла L. Оно вызывает изгиб примыкающих к нему стержней BL, LD,OL,LA. Остальные стержни, в следствие отсутствия присутствия деформаций соответствующих узлов, остаются недеформированными.
В состоянии на рис.6 единичный поворот по часовой стрелке задан четвертой добавленной связи и, следовательно, закрепляемому ею узлу N. В результате изгибаются стержни AN, RN и ND. Консоль и остальные стержни деформаций не испытывают.
Заданная нагрузка также вызывает изгиб стержней. Так как узел L полностью неподвижен, то изгиб стержня LA суть следствие нагружения его равномерно распределенной нагрузки. Сосредоточенная сила в точке B полностью воспринимается второй дополнительной опорой, а на конце консоли такая же сила вызовет её изгиб. Деформация коснется только выше рассмотренных стержней. Воздействия на основную систему вызывают реакции в заданных и добавленных связях.

рис.4
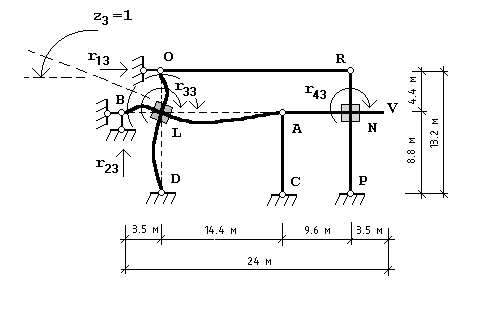
рис.5

рис.6
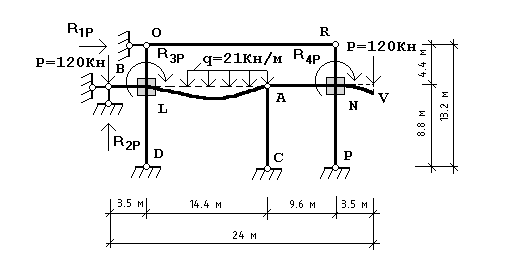
рис.7
Однако следует помнить, что реакции при изгибе стержней возникают только в тех опорах, которые закрепляют узлы этих стержней от перемещений. Изгибающие моменты возникают лишь в изогнутых стержнях. Эпюры изгибающих моментов для каждого из состояний представлены ниже (рис.8;9;10;11;12), для построения которых была использована таблица реакций (таблица приведена в приложении ).
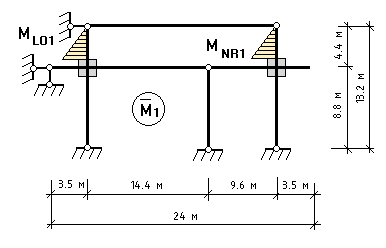
рис.8
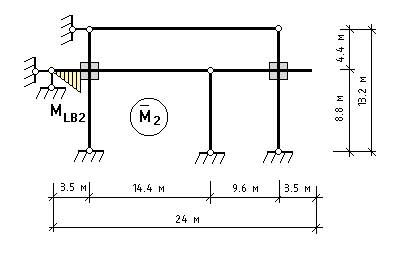
рис.9
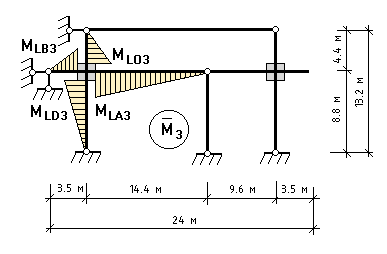
рис.10
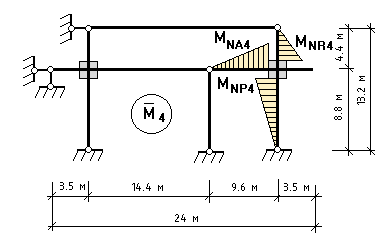
рис.11
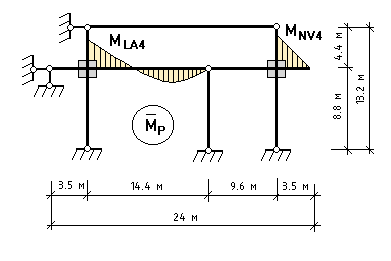
рис.12
Определим по формулам, имеющимся в таблице реакций, значения изгибающих моментов и реакций в связях (реакции в связях показаны на рис.13). Индексы обозначений усилий следует понимать следующим образом: 1-ый символ – точка рамы, в которой показывается усилие; 2-ой символ – точка рамы, которая вместе с 1-ой точкой образует соответствующий усилию изгибаемый стержень; 3-ий символ – состояние в котором рассматривается деформации стержней ( М1, М2, М3, М4, Мp).
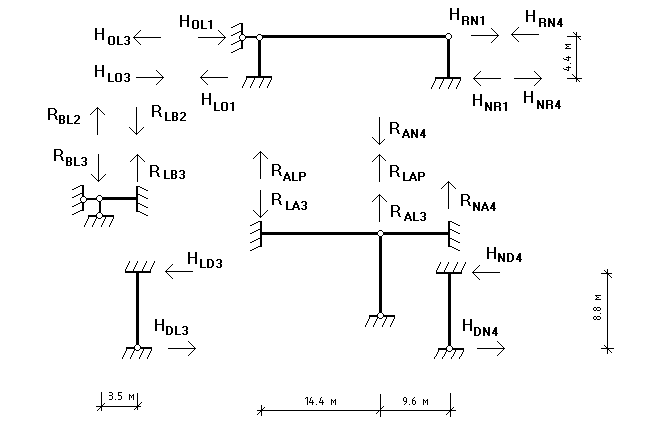
рис.13
MLO1 = 3.(EI)OL/lOL2 = 3.0,42.105./4,42 =0,065.105;
MNR1 = 3.(EI)OL/lOL2 = 3.0,42.105./4,42 = 0,065.105;
MLB2 = 3.(EI)LB/lLB2 = 3.1,4.105./3,52 = 0,343.105;
MLO3 = 3.(EI)LO/lLO = 3.0.42.105./4.4 = 0,286.105;
MLB3 = 3.(EI)LB/lLB = 3.1.4.105./3.5 = 1,2.105;
MLA3 = 3.(EI)LA/lLA = 3.1.4.105./14.4 = 0,292.105;
MLD3 = 3.(EI)LD/lLD = 3.0.42.105./8.8 = 0,143.105;
MNA4 = 3.(EI)NA/lNA = 3.1.4.105./9.6 = 0,438.105;
MNR4 = 3.(EI)NR/lNR = 3.0.42.105./4.4 = 0,286.105;
MNP4 = 3.(EI)NP/lNP = 3.0.42.105./8.8 = 0,143.105;
MLAP = ql2/8 = 21.14,42/8 = 544,320(кН.м);
MNVP = 120.3,5 = 420 (Кн.м); HLO1 = HOL1 = 3.(EI)OL/lOL3 = 3.0.42.105./4.43 = 0,015.105; HRN1 = HNR1 = 3.(EI)NR/lNR3 = 3.0.42.105./4.43 = 0,015.105;
RLB2 = RBL2 = 3.(EI)LB/lLB3 = 3.1.4.105./3.53 =0,098.105;
RLB3 = RBL3 = 3.(EI)LB/lLB2 = 3.1.4.105./3.52 = 0,343.105;
HLO3 = HOL3 = 3.(EI)OL/lOL2 = 3.0.42.105./4.42 = 0,065.105; RLA3 = RAL3 = 3.(EI)LA/lLA2 = 3.1.4.105./14.42 = 0,020 .105;
HLD3 = HDL3 = 3.(EI)LD/lLD2 = 3.0.42.105./8.82 = 0,016.105;
RAN4 = RNA4 = 3.(EI)NA/lNA2 = 3.1.4.105./9.62 =0,046.105; HRN4 = HNR4 = 3.(EI)NR/lNR2 = 3.0.42.105./4.42 = 0,065.105
HNP4 = HPN4 = 3.(EI)NP/lNP2 = 3.0.42.105./8.82 = 0,016.105;
RALP = 5.q.l/8 = 5.21.14.4/8 = 189,000 (кН);
RLAP = 3.q.l/8 = 3.21.14.4/8 = 113,400 (кН);
Значения коэффициентов при неизвестных, который заключатся в определении коэффициентов перемножением эпюр, используя способ Верещагина и формулу Симпсона, как это делалось в методе сил. Эта возможность вытекает из теоремы о взаимности работ и реализуется в виде следующей формулы:
rik =  ; ;
Mi и Мk – единичные эпюры, построенные в основной системе метода перемещений.
r11 = 1/2. 4,4.0,065.105. 2/3. 0,065.105/(0.42.105) +1/2. 4,4.0,065.105. 2/3. 0,065.105/(0.42.105) = 0,03.105;
r12 = r21 = 0;
r13 = r31 = -1/2. 4,4.0,065.105. 2/3. 0,286.105/(0.42.105) = - 0,065.105;
r14 = r41 = -1/2. 4,4.0,065.105. 2/3. 0,286.105/(0.42.105) = - 0,065.105;
r22 = 1/2. 3,5.0,343.105. 2/3. 0,343.105/(1.4.105) = 0,098.105;
r23 = r32 = - 1/2. 3,5.0,343.105. 2/3. 1,2.105/(1.4.105) = - 0,343.105;
r42 = r24 = 0;
r33 = 1/2. 3,5.1,2.105. 2/3. 1,2.105/(1.4.105) + 1/2. 4,4.0,286.105. 2/3. 0,286.105/(0.42.105) +1/2. 14,4.0,292.105. 2/3. 0,292.105/(1.4.105) + 1/2. 8,8.0,143.105. 2/3. 0,143.105/(0.42.105) = 1,921.105;
r34 = r43 = 0;
r44 = 1/2. 9,6.0,438.105. 2/3.0,438.105/(1.4.105) + 1/2. 4,4.0,286.105. 2/3. 0,286.105/(0.42.105) + 1/2. 4,4.0,143.105. 2/3. 0,143.105/(0.42.105) =
= 0,867.105;
Значения свободных членов системы канонических уравнений найдём статическим способом (рис.14):
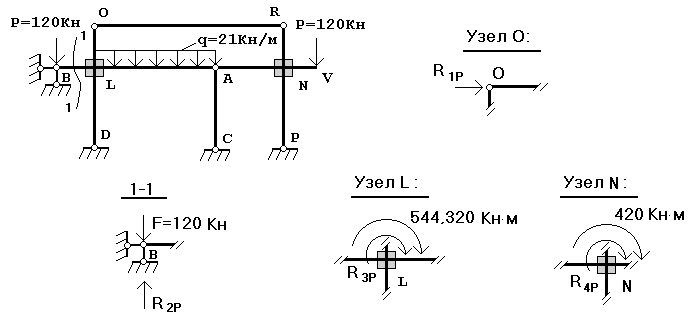
рис.14
Если сделать сечение 1-1, то из проекции всех сил, действующих на отсеченную часть, на ось Y найдём R2p :
 ; R2p – 120 =0; R2p =120 (кН); ; R2p – 120 =0; R2p =120 (кН);
Из проекции всех сил, действующих на вырезанный узел O, на ось Х найдем R1p:
 ; R1p =0; ; R1p =0;
Вырежем узел L :
 ; R3p + 544,320 =0; R3p = -544,320 (кН.м); ; R3p + 544,320 =0; R3p = -544,320 (кН.м);
Вырежем узел N :
 ; R4p + 420 =0; R4p = -420 (кН.м); ; R4p + 420 =0; R4p = -420 (кН.м);
Найденные коэффициенты подставим в систему (*), которая в матричной форме примет вид:

Решив систему линейных алгебраических уравнений, найдем значения неизвестных Z1 ,Z2 , Z3 , Z4 :
 ; ;
5. Окончательную эпюру изгибающих моментов (рис.15) построим согласно выражению :
 . .
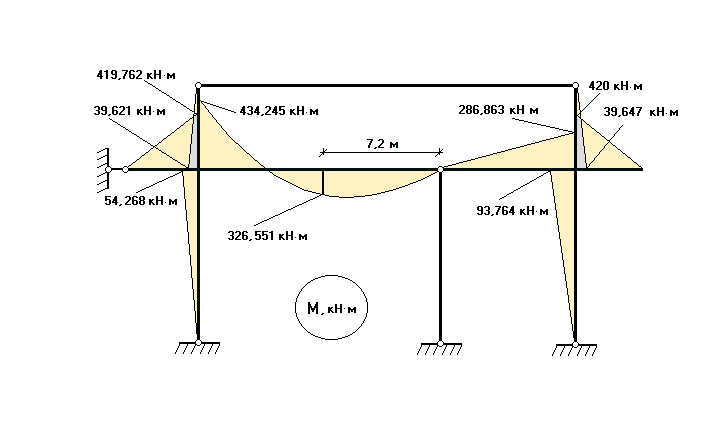
рис.15
6. Для проверки правильности построения эпюры М рассмотрим статическое равновесие жестких узлов рамы (рис.16):

рис.16

7. Вычислим значения эпюры поперечных сил (рис.17):
QOL = QLO = - 419,762/3,5 = -119,932 (кН);
QLD = QDL = - 54,268/8,8 = -6,167(кН);
QLR= QRL = 39,621/4,4 = 9,005(кН);
QNL = QLN = 39,647/4,4 = 9,011(кН);
QNP = QPN = -93,764/8,8 = -10,655(кН);
QNA = QAN = - 286,863/9,6 = -29,882(кН);
QNV = QVN = 420/3,5 = 120(кН);
Q LA= 21.14,4/2 + 434,245/14,4 = 181,356(кН);
Q AL= -21.14,4/2 + 434,245/14,4 = -121,044(кН);
6. Эпюру поперечных сил строим как и в методе сил по эпюре изгибающих моментов (рис.16), а эпюру продольных сил по эпюре поперечных сил (рис.18).
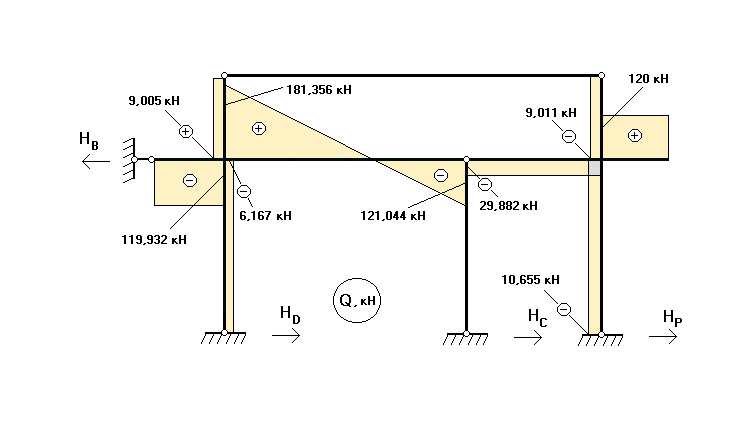
рис.17

Рассмотрим узел О:

Рассмотрим узел N:

Рассмотрим узел A:

Рассмотрим узел L:

Эпюра продольных сил представлена на рис.19.
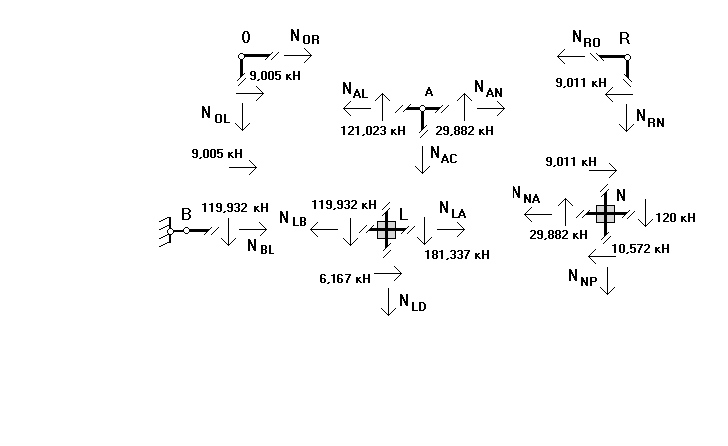
рис.18

рис.19
7. Проверим выполнение условия равновесия всех сил, действующих на раму (рис.20):
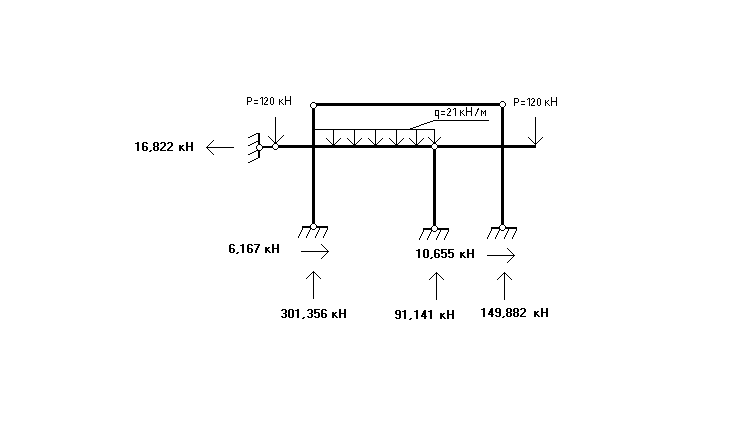
р ис.20 ис.20
Рама рассчитана верно.
|
|
|
 Скачать 0.51 Mb.
Скачать 0.51 Mb.