ГОН. Расчет тактикотехнических характеристик радиолокаторов обнаружение и сопровождения целей
 Скачать 0.52 Mb. Скачать 0.52 Mb.
|

|
Министерство образования и занятости населения Приморского края  КРАЕВОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ «ПРИМОРСКИЙ ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ» Метеорологическое отделение Специальность 11.07.05 Радиотехнические информационные системы Работа допущена к защите: Завотделением _______М.Н.Лаврентьева «____» _____________ 20__ г. Выпускная квалификационная работа На тему: Расчет тактико-технических характеристик радиолокаторов обнаружение и сопровождения целей
Владивосток 2022 КГА ПОУ ППК Гидрометеорологическое отделение ЗАДАНИЕ На выпускную квалификационную работу Студенту Калистову Алексею Викторовичу Группы Р-41,42 На тему: Расчет тактико-технических характеристик радиолокаторов обнаружение и сопровождения целей. Вопросы подлежащие разработке (исследованию) 1.Анализ поставленной задачи 1.1 Принцип работы современных обзорных РЛС 1.2 Место установки, зоны обзора и технические параметры обзорных РЛС 2. Расчетная часть 2.1 Предварительны расчет приемника обзорной РЛС 2.2 Выбор схем функциональных узлов приемника 2.3 Составление структурной схемы проектируемого приемника 2.4 Электрический расчет УПЧ 2.5 Составление монтажной и печатной плат УПЧ Заключение: содержит выводы по всей работе и рекомендации автора Приложения -Структурная схема обзорной РЛС -Структурная схема приемника обзорной РЛС -Монтажная и печатная платы УПЧ Основные источники информации и прочее, используемые для разработки темы: Срок представления работы « « 2022г Дата выдачи задания « « 2022 Руководитель Подпись Пономарев Г.Ф. Задание получил Подпись ВведениеАктуальность Бурное развитие авиации, наземных средств обеспечения полетов и систем противовоздушной обороны (ПВО) предъявляет все более высокие требования к объему, качеству и своевременности их информационного обеспечения, наиболее важную роль в котором играют радиолокационные станции(РЛС) различного назначения, в частности, РЛС обнаружения и сопровождения воздушных целей (ВЦ).Современные РЛС обнаружения и сопровождения являются важным элементом систем контроля воздушного пространства (СКВП), типичными представителями которых являются системы управления воздушным движением и системы ПВО. Они позволяют эффективно решать задачи поиска и обнаружения летательных аппаратов (ЛА) в зоне наблюдения, сопровождения ЛА, подготовки данных для передачи ЛА на дальнейшее обслуживание исполнительной подсистеме (ИПС) СКВП и др. Большие информационные возможности современных РЛС предопределяются их высоким техническим уровнем: применением разнообразных видов и параметров зондирующих сигналов, возможностью реализации различных режимов работы, использованием моноимпульсных способов пеленгования, высокими уровнями энергетических потенциалов, применением фазированных антенных решеток и т.д. На сегодняшний день радиолокацию можно рассматривать как область радиоэлектроники, занимающаяся обнаружением объектов (целей), определением их пространственных координат, параметров движения и физических размеров с помощью радиотехнических средств и методов. При этом под радиолокацией понимают также сам процесс радиолокационного наблюдения (локации) объектов, а устройства такого назначения - РЛС или радиолокаторами. Таким образом, современная радиолокация - это высокоинтеллектуальный продукт инженерной мысли, который сегодня является основным средством разведки и наблюдения. Современные РЛС и системы разведки земного, морского и воздушного пространства создаются на базе компьютерных и телекоммуникационных технологий, глобальных и локальных систем координатно-временного обеспечения, цифровой обработки сигналов. Также создаются станции с управляемой энергетикой (в том числе сложение энергии сигнала в пространстве), развивается многопозиционная локация, достигнуты существенное уменьшение габаритов и энергопотребления, рост функциональной насыщенности аппаратуры и многое другое. Цель Радиолокационные измерители, предназначенные для того, чтобы преобразовать параметры обнаруженных сигналов именно в такие аналоги, которые позволяют выявить нужную радиолокационную информацию, Зашифрованную в параметрах принятых сигналов. Основные требования к радиолокационным измерителям: Высокая точность измерений; темп измерений должен соответствовать количеству одновременно наблюдаемых целей и их скоростям; принятый метод измерений должен удовлетворять требуемой разрешающей способностью РЛС; нет тут измерений должен соответствовать применяемой системе обнаружения. Последние требования облегчается тем, что оптимальное фильтрация и корреляционная обработка сигналов способствует не только обнаружению слабых сигналов, ну и повышению точности измерений. Все же некоторые различия имеются: те чтобы совместить заданные вероятности правильного обнаружения и ложной тревоги, выбирают промежуточный порог обнаружение, как наибольшая точность получается при фиксации пика оптимального обработанного сигнала. Задачи Радиолокационная информация становится доступной для ее получателей лишь после того, как параметры обнаруженных сигналов, в которых содержатся эта информация, преобразуется в соответствующие величины (Аналоги). Например, оператор РЛС судит о координатах и скорости цели по отметкам на электронное— лучевых индикаторах или по показаниям стрелочных приборов; вычислительная машина непрерывного действия реагирует на постоянные напряжения, цифровая вычислительная машина— на цифровой код и т д. 1.Анализ поставленной задачи 1.1 Принцип работы современных обзорных РЛС Виды РЛС обнаружения и сопровождения целей  Следует отметить, что радиолокация основана на использовании ряда физических законов и свойств, связанных с распространением и рассеянием электромагнитных волн (ЭМВ). Важнейшим для радиолокации свойством электромагнитных волн является их рассеяние при падении на объекты, что позволяет, принимая рассеянные объектом волны и измеряя их параметры, судить о наличии и свойствах объекта. В общем случае объект рассеивает волны во все стороны, в том числе и в сторону, обратную направлению прихода падающей волны. Таким образом, облучая объект, можно принимать отраженную волну в том же месте, откуда распространяется волна облучения. Также в радиолокации используется закон о прямолинейности и постоянства скорости распространения электромагнитных волн в однородной среде. Другими словами, электромагнитные волны распространяются в однородной среде прямолинейно и с постоянной скоростью: где еама- абсолютные диэлектрическая и магнитная проницаемости среды (для свободного пространства еа = е0 =1/36р *109 Ф/м;= = 4р* 10-7 Г/м и соответственно х = с = 3 * 108 м/с). Нужно подчеркнуть тот факт, что именно постоянство вектора скорости распространения электромагнитных волн в однородной среде, то есть его модуля и направления, служит физической основой радиолокационных измерений. Действительно, благодаря этому дальность Д и время распространения радиоволны (РВ) связаны прямой пропорциональностью, и если измерено время прохождения волны между целью и РЛС, то становится известным и расстояние между ними: Цель вносит неоднородность в свободное пространство, так как параметры ее еа и отличаются соответственно от е0 и , чем нарушается постоянство вектора скорости распространения радиоволн. В результате объект преобразует радиоизлучение: часть энергии переотражается, часть - поглощается объектом, переходя в тепло, а другая часть при радиопрозрачности объекта - преломляется, изменяя направление радиоволны. С точки зрения радиолокации интересен первый случай, когда цель становится источником вторичного излучения. По времени запаздывания отраженного сигнала относительно излученного определяем наклонную дальность цели. Возможно и такое решение: на цели, если она «своя», а не противника, устанавливается приемопередатчик, называемый ответчиком, или ретранслятором, который принимает зондирующий сигнал от РЛС и усиливает его для запуска передатчика. Ответный сигнал принимается на РЛС, и дальность цели определяется по следующей формуле: где - запаздывание ответного сигнала относительно зондирующего; - заранее известное время задержки сигнала в цепях ответчика. Необходимо заметить, что величина должна измеряться безынерционными электронными часами, так как время запаздывания радиолокационных сигналов очень мало (от микро- до миллисекунд). Например, радиоволны, отраженные от цели с дальностью Д = 150 м, запаздывает на одну микросекунду, и каждому километру дальности цели соответствует задержка радиоволны на время 1000/150 = 6,7 мкс. При этом пусть радиолокационная антенна имеет вид прямолинейной решетки из вибраторов, отстоящих один от другого на расстоянии. Значительная удаленность цели от РЛС позволяет, что лучи, идущие от цели к вибраторам, направлены параллельно под углом к решетки, а амплитуды ЭДС, наводимых в отдельных вибраторах, равны между собой. В этих условиях ЭДС соседних вибраторов отличаются только сдвигом по фазе ш, вызванным разностью хода волн (dcos). Так как на каждую единицу длины данная бегущая волна отстает по фазе на угол 2р/л, то: Сложение векторов ЭДС вибраторов при различных углах и дает различную результирующую ЭДС в антенне, отсюда и вытекает возможность пеленгации цели по амплитудным и фазовым характеристикам направленности антенны, а первопричиной образования таких характеристик явилось различие в запаздывании волн, принимаемых отдельными элементами решетки, следовательно, не только радиодальнометрия, но и радиопеленгация основана на постоянстве скорости и направления распространения волн . Радиальную и угловую скорости цели можно найти вычислением скорости приращения дальности и углов во времени, но обычно предпочитают более простую и точную операцию - непосредственное измерение так называемого доплеровского сдвига частоты (f0), вызванного движением цели. Доплеровский сдвиг частоты Fд связан с радиальной скоростью движения объекта Vr соотношением где л0 - длина волны излучаемого сигнала; Vr- радиальная скорость относительного движения цели. Если цель приближается к РЛС или удаляется от нее, то отраженный сигнал появляется в РЛС соответственно раньше или позже, чем при неподвижной цели, и за счет этого фаза принимаемой волны имеет другие значения, а это равнозначно приращению частоты радиосигнала. Измерив полученное (доплеровское) приращение частоты, можно (благодаря постоянству скорости распространения радиоволн) определить радиальную скорость цели. Подобно тому, как разность времени запаздывания сигнала в элементах антенны определяется угловыми координатами цели, разность доплеровских сдвигов частот в тех же (обычно крайних) элементах антенны определяется скоростью изменения углового положения цели. Таким образом, радиолокации является одним из важнейших направлений современной радиоэлектроники, при этом история именно этой области науки и техники дает возможность проследить общие процессы современного научно-технического прогресса. В настоящее время радиолокация применяется не только в армии, так как теперь она успешно служит во многих областях мирной жизни, помогает решать сложные задачи науки. Физической основой радиолокационных измерений дальности, угловых координат, радиальной и угловой скоростей цели является постоянство направления и скорости распространения электромагнитных волн в однородной среде. В качестве проектируемой РЛС я выбрал, импульсную, наземную передвижную двухкоординатную РЛС кругового обзора. 1.2 Место установки, зоны обзора и технические параметры обзорных РЛС Радиолокационная станция развертывается на равнинной местности, естественных холмах или искусственных насыпях. При оборудовании позиции на равнинной местности площадка для размещения полуприцепа 6УФ должна быть горизонтальной и иметь размеры не менее 20 м в диаметре Угол наклона площадки к горизонту не должен превышать ±5° В месте установки полуприцепа 6УФ допускаются отдельные неровности, но не более 70 мм При размещении полуприцепа 6УФ на холме или искусственной насыпи размер площадки должен быть не менее 8 м по ширине и 20 м по длине Наклон площадки к горизонту должен быть не более ±5°. Ширина въезда и съезда должна быть не менее 4 м.,уклон —не более 15° При выборе позиции для РЛС необходимо исходить из условия обеспечения наилучшего обзора пространства в ответственном секторе по азимуту и углу места На позиции РЛС на дальности до 400 м не должно быть леса, мачт ЛЭП и различных сооружений Углы закрытия РЛС П35 не должны превышать минус 4'. Позиция должна быть удалена на расстояние 3—4 км от населенных пунктов. Зоны обзора В РЛС обзор пространства в угломестной плоскости осуществляется с помощью специальной антенны, обладающей углочастотной чувствительностью. При изменениичастоты зондирующего сигнала автоматически изменяется положение луча в пространстве. В РЛС имеются четыре режима обзора пространства в угломестной плоскости. В режиме 1 обзор пространства осуществляется четырьмя лучами соответственно на частотах f n1; f n3; f n5; f n7; (рис. 2) Режим выполняется на каждом обороте антенны. Нижняя граница зоны обнаружения по углу места — минус 20', верхняя граница — 60  Рисунок 2 Режим 1 является дежурным режимом и применяется для выполнения боевой задачи по обнаружению и сопровождению маловысотных целей Рис.1.3 Режим 1 обзора пространства В режиме 2 обзор пространства осуществляется на первом обороте антенны первым и вторым лучами соответственно на частотах f n1; f n3. Нижняя граница зоны обнаружения — минус 20', а верхняя — 3°. На втором обороте антенны обзор пространства производится третьим и четвертым лучами соответственно на частотах f n5; f n7; Нижняя граница зоны обнаружения — 3°, а верхняя — 6° (рис. 3). 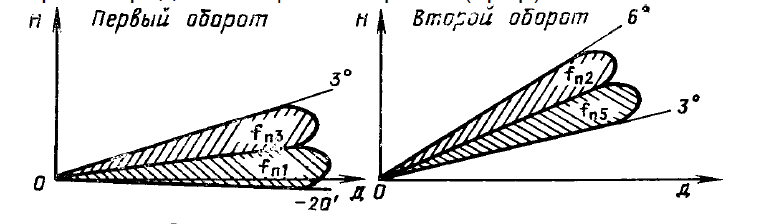 Рисунок 1 Режим 2 применяется для выполнения боевой задачи по обнаружению и сопровождению маловысотных целей в условиях активных помех, а также для защиты от противорадиолокационных ракет (прлр) В режиме 3 обзор пространства осуществляется за первый оборот антенны четырьмя лучами соответственно на частотах f n1; f n3; f n5; f n7; (нижняя зона). Нижняя граница зоны обнаружения — минус 20', а верхняя — 6° На втором обороте антенны включается облучатель верхней зоны и обзор пространства производится четырьмя лучами соответственно на частотах f n1; f n3; f n5; f n7 (верхняя зона). Нижняя граница зоны обнаружения — 60, а верхняя —30° (рис. 4). Режим 3 применяется для выполнения боевой задачи по целям на малых и средних высотах, а также для уменьшения радиуса мертвой воронки (Rмв) при сопровождении целей. Рис.4. 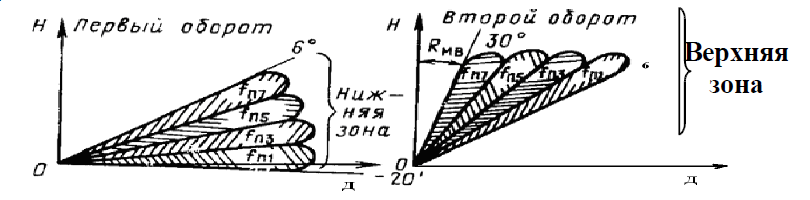 Рисунок 2 Режим 3 обзора пространства В режиме 4 обзор пространства осуществляется двумя лучами за каждый оборот антенны соответственно на частотах f n1; f n3. Нижняя граница зоны обнаружения — минус 20', а верхняя — 30 (рис. 5). Режим 4 применяется для выполнения боевой задачи по маловысотным целям в условиях интенсивных активных помех. Обзор пространства по азимуту производится путем кругового вращения антенны со скоростями 6 или 12 об/мин. Необходимая скорость вращения выбирается оператором, исходя из воздушной обстановки. 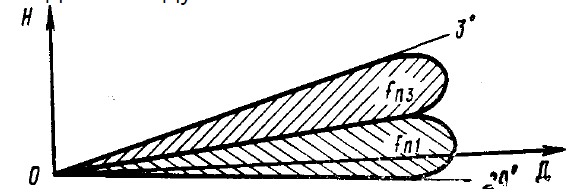 Рисунок 3 Ширина диаграммы направленности антенны РЛС в горизонтальной плоскости 2° по уровню 0,5 Рмакс. (рис. 6).  Рисунок 4 Технические параметры обзорных РЛС Технические параметры РЛС П35 Радиус зоны обзора — 350 км Частота запуска — 375 Гц Количество каналов — 6 (4 на нижнем зеркале, 2 — на верхнем) Диапазон несущих частот — 2700-3100 МГц Скорость обзора пространства — 6 об/мин Высота обзора пространства — 85.000 м Экипаж — 8 чел. Время развертывания тренированным экипажем — 12 ч. 1.3 Структурные и функциональные схемы обзорных РЛС Структурная схема активной РЛС с активным ответом. 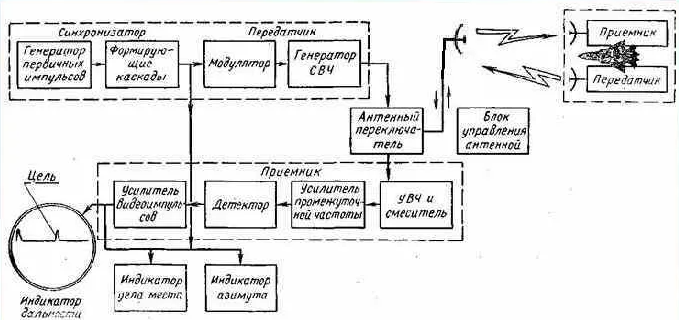 Функциональная схема РЛС с активным ответом 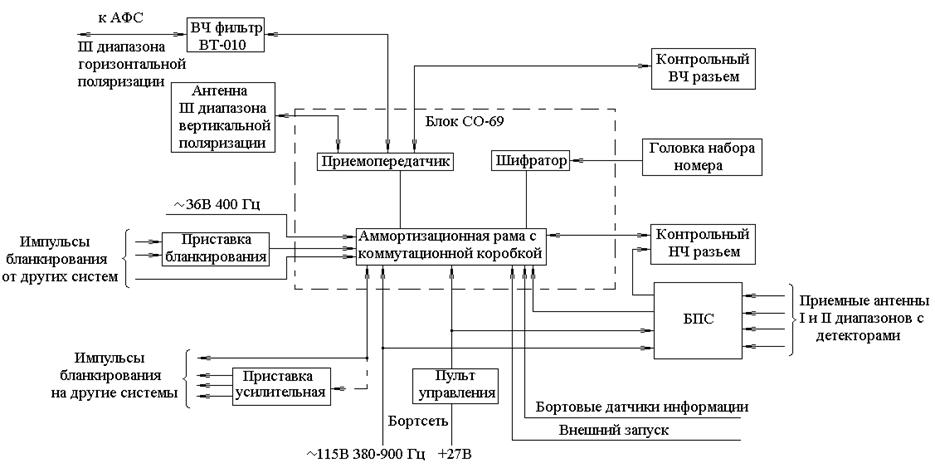 1.4 Составление структурной схемы проектируемой РЛС Импульсными РЛС называются такие, в которых дальность до цели определяется путем измерения времени задержки эхо-сигнала относительно зондирующего импульсного сигнала. Состав структурной схемы радиолокационной станции определяется ее функциями. В общем случае, для получения информации о целях радиолокационным методом станция должна обеспечивать выполнение следующих функций: - облучение целей электромагнитной энергией (зондирование зоны обзора); - прием отраженных от цели эхо-сигналов и выделение их из помех; - отображение получаемой радиолокационной информации и измерение координат целей; - определение государственной принадлежности; - ввод радиолокационной информации в устройство обработки и выдачу ее в каналы связи. 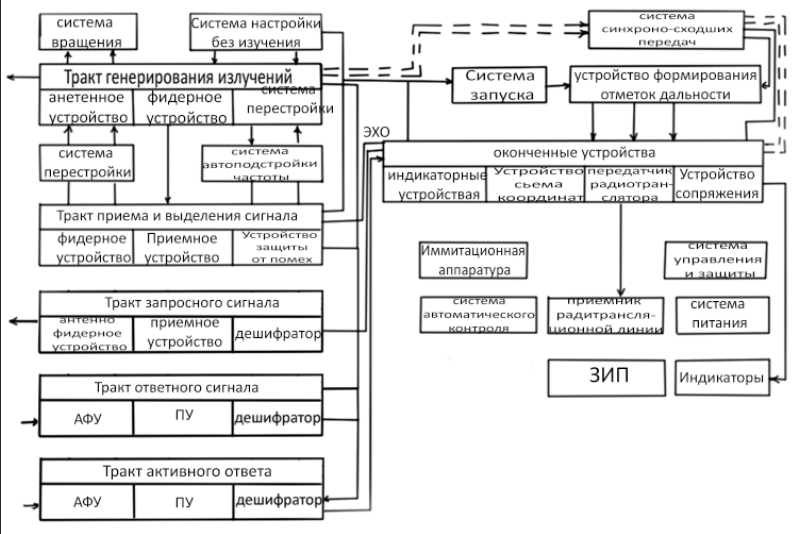 Выполнение первой функции обеспечивается трактом генерирования и излучения, последовательно осуществляющим ФКМ сигналов, передачу их к антенне и излучение их в пространство. В состав тракта входят: передающее устройство, фидерное устройство и антенна. Функции приема отраженных от цели сигналов и выделение их из помех осуществляются трактом приема и выделения сигналов из помех. Здесь решаются задачи фильтрации, усиления, преобразования сигналов и выделения их из шумов, пассивных и активных помех. Основными элементами тракта являются: антенно-фидерное устройство, приемное устройство, устройство защиты от помех. Отображение воздушной обстановки в зоне обзора РЛС и определение координат целей решается с помощью оконечных устройств РЛС. Оконечными устройствами РЛС могут быть устройства автоматического измерения и съема координат, индикаторные или другие устройства отображения. Для синхронизации работы передающих, индикаторных устройств и других систем РЛС во времени необходима система запуска. Для измерения координат с индикаторных устройств или путем автоматической обработки сигналов необходимо формирование специальных масштабных отметок или кода дальности, азимута, высоты. Опознавание цели осуществляется в специальной системе опознавания, составной частью которой являются наземные радиолокационные запросчики, сопрягаемые с РЛС. Конкретизация элементов структурной схемы импульсной РЛС, состава, назначения и взаимодействия отдельных систем будет рассмотрена далее. |